

Лекции Алексеевой
.pdfКруговая диаграмма Мора
Рассмотрим, как меняются нормальные напряжения в семействе площадок, параллельных направлениям главных напряжений(главным осям).
НС задано тремя главными напряжениями 1, 2 , 3
Рассмотрим семейство площадок, параллельных 3 , и найдем нормальное v и касательное v напряжения на этих площадках.
2
 2
2
1

 1
1
3
3

Fv 0;
v A 1 ( Acos ) cos 2 ( Asin ) sin 0
|
|
|
v |
cos2 |
2 |
sin2 |
|
||||||||
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|||
|
С учетом, что sin2 1 cos 2 , cos2 |
1 cos 2 |
|||||||||||||
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
2 |
|
|
|
v |
|
|
1 2 |
|
1 2 |
cos 2 |
|
|
|||||
|
|
|
2 |
|
|
|
|
||||||||
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|||
Ft 0; |
v A 1 ( Acos ) sin 2 ( Asin ) cos 0 |
|
|||||||||||||
С учетом, что sin 2 2sin cos |
|
|
|
|
1 |
2 |
sin 2 |
|
|||||||
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
Исключим параметр . Возведем в квадрат левые и правые части и сложим
|
|
|
2 |
2 |
2 |
|
|
2 |
2 |
. |
|
1 |
|
|
|
1 |
|
||||
|
|
2 |
|
|
|
|
2 |
|
|
|
|
|
|
|
|
2 |
2 |
|
|
2 |
|
|
|
|
|
|
1 |
2 |
|
|
1 |
2 |
|
|
|
|
|
|
|
|
2 |
|
|
|
2 |
|
|
|
|
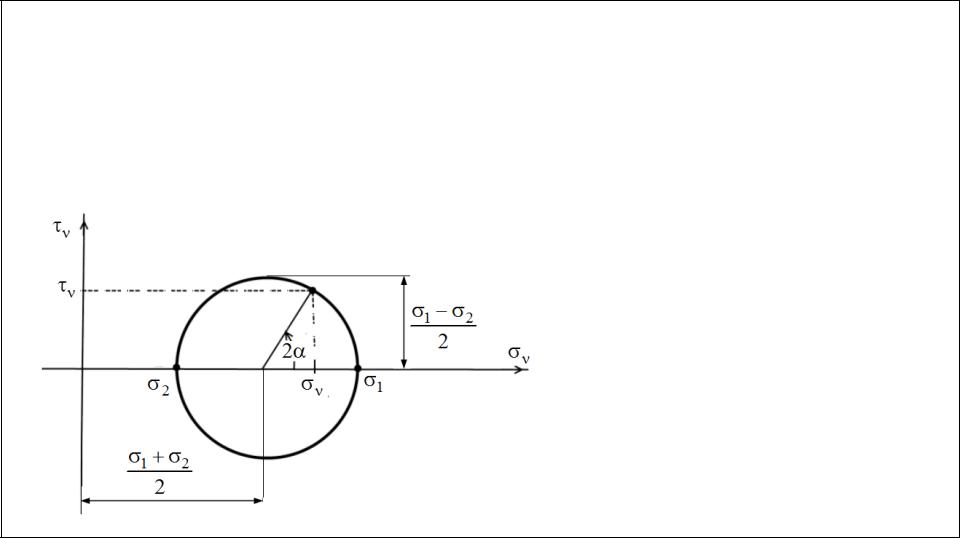
В системе координат , |
это уравнение окружности, с центром на оси |
|||||||||||
на расстоянии |
1 |
2 |
от начала координат и радиусом |
1 2 |
. |
|||||||
|
2 |
2 |
||||||||||
|
|
|
|
|
|
|
|
|
|
|
||
Круг напряжений Мора (круговая диаграмма НС)
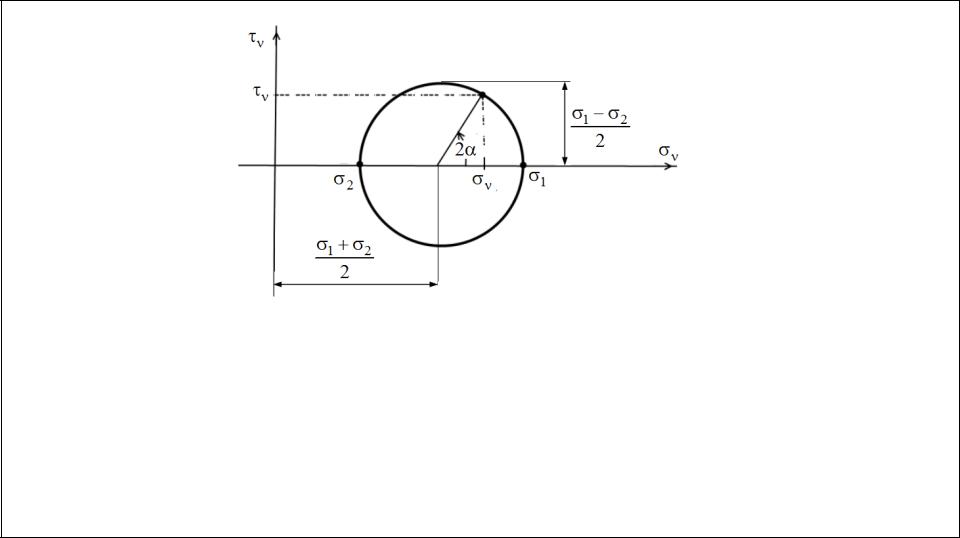
Каждой наклонной площадке и действующим на ней напряжениям , на круге Мора соответствует определенная точка.
Вчастности:
–при 0 , получаем главную площадку максимального напряжения 1
–при 90 – площадку минимального напряжения 2 .

Если рассмотреть площадки, параллельные 1 и 2 , получим два других круга.
произвольная
площадка
Напряжениям на наклонных площадках, параллельных главным осям, соответствуют точки, расположенные на указанных окружностях. Напряжениям на любых произвольно ориентированных площадках соответствуют точки расположенные в заштрихованной области.
При повороте реальной площадки на угол на круге Мора ей соответствует поворот на 2 .
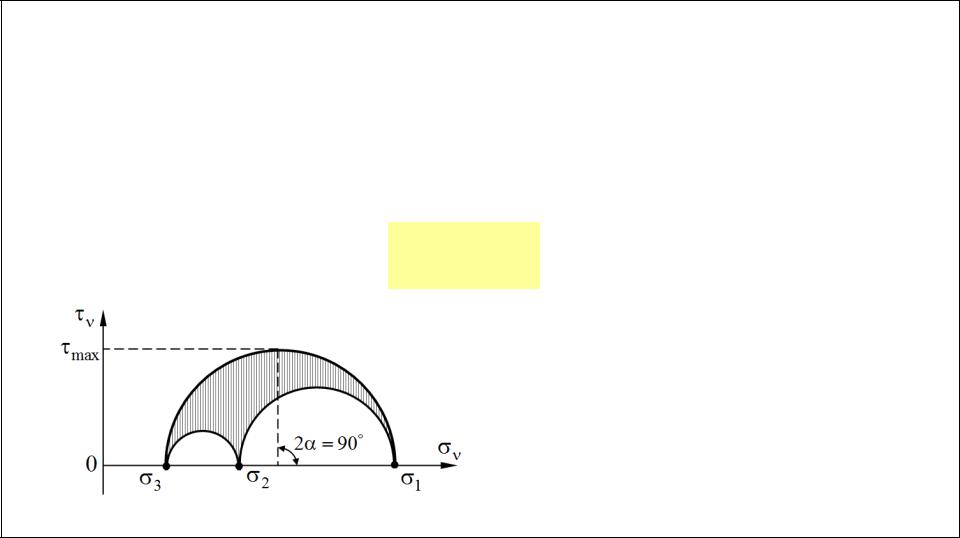
Следствия из диаграммы Мора
1. Нормальные напряжения на любой площадке находятся в пределах
3 v 1 .
2. Максимальное касательное напряжение max действуют на площадках,
параллельных 2 главной оси, наклонённых к осям 1 и 3 под углом 45
max 1 3 .
2
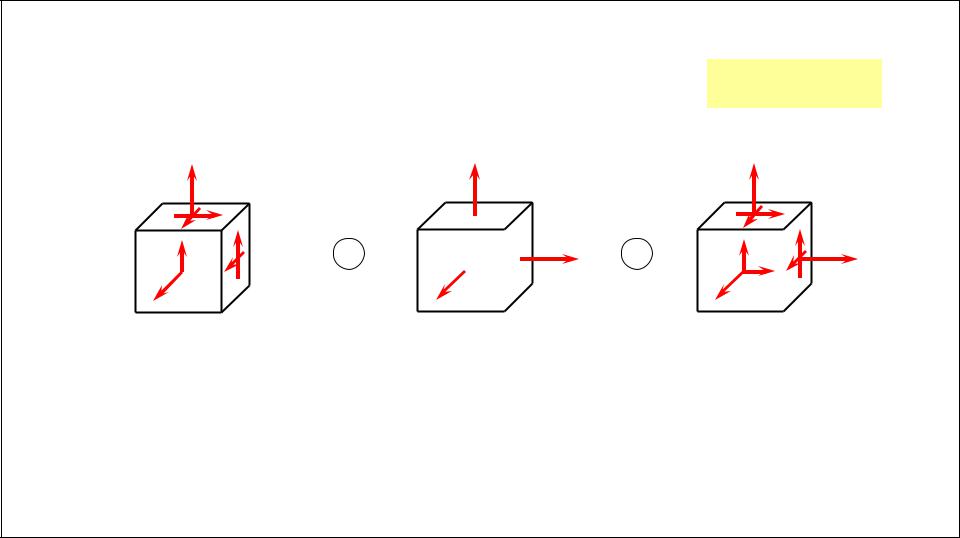
Разложение тензора напряжений на шаровой тензор и тензор-девиатор
Разложим данное НС в точке тела на два: |
T T 0 |
D |
- трехосное равное растяжение – шаровой тензор |
- девиатор напряжений, которое дополняет шаровой тензор до данного НС.
y |
|
σy |
|
||
|
|
|
σx
σz 
 x
x
z 
|
σx |
τyx |
τzx |
|
|
|||
|
τxy |
σy |
|
|
|
|
||
|
τzy |
|||||||
|
τ |
|
τ |
|
σ |
|
|
|
|
xz |
yz |
z |
|
|
|||
|
|
|
|
|
|
|||
|
|
|
|
|
|
0 |
|
|
|
|
|
|
y 0 |
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
0 |
|
|
|
|
0 |
|
|
|
|
|
|
|
x 0 |
|||
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
z 0 |
|
|
|
||
|
|
0 |
0 0 |
|
|
|
x 0 |
yx |
|
|
zx |
|
|
|||||
|
|
0 |
|
|
|
|
|
|
xy |
y 0 |
|
zy |
|
|
||||
0 |
0 |
|
|
|
|
|
. |
|||||||||||
|
|
|
|
|
|
|||||||||||||
|
0 |
0 |
0 |
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
xz |
|
yz |
|
z |
|
0 |
|
шаровой тензор |
девиатор напряжений |
|

|
|
|
|
σ0 |
σx σy σz |
– среднее напряжение |
|
3 |
|
||
|
|
|
|
Первые инварианты:
- шарового тензора I1Ш 3 0 ,
- девиатора I1D (σx σ0 ) (σy σ0 ) (σz σ0 ) 0 .
Девиатором называют тензор, у которого первый инвариант равен нулю. Девиатор напряжений показывает, насколько заданное напряженное состояние отличается от всестороннего равного растяжения или сжатия.
Эксперименты показывают, что при всестороннем растяжении или сжатии не возникает пластическое состояние в изотропном материале, следовательно при построении теории прочности шаровым тензором можно пренебречь.
ТЕОРИЯ ДЕФОРМИРОВАННОГО СОСТОЯНИЯ
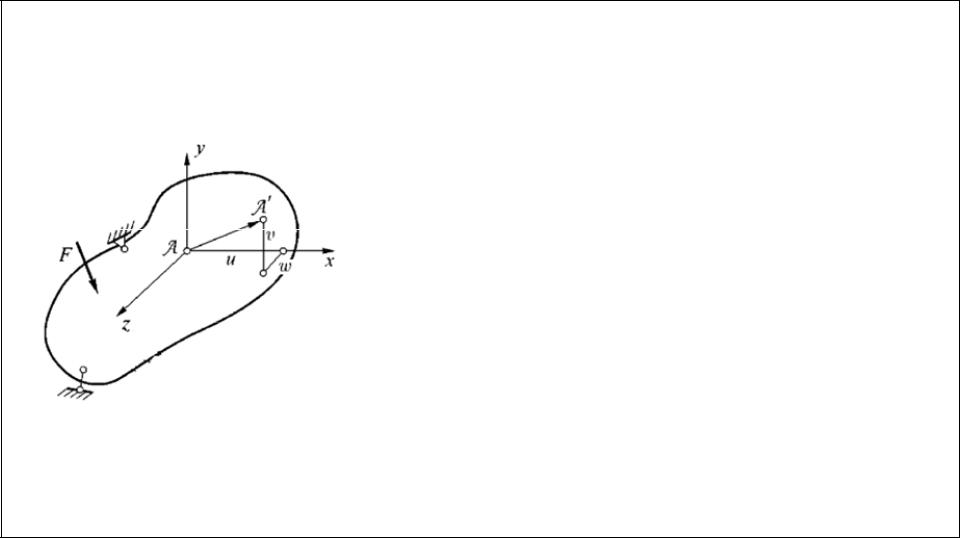
Деформацией тела называется изменение его формы и размеров. Деформация тела связана с перемещениями его точек.
AA – полное перемещение точки А.
Проекция вектора полного перемещения на ось какого-либо направления называется
перемещением по оси:
u – перемещение по оси x v – перемещение по оси y w – перемещение по оси z
Деформация точки тела (кубика) состоит из линейных (изменяется длина ребер) и угловых (изменяются углы между гранями) деформаций.

|
y |
y |
||
|
||||
|
|
|
xy |
|
dy |
|
|
dy dy |
|
|
x |
|
x |
|
|
|
|
||
|
dx |
|
dx dx |
|
Изменения длины ребер характеризуется тремя относительными линейными деформациями (или просто линейными деформациями)
x dxdx , y dydy , z dzdz .
Изменения первоначально прямых углов между ребрами характеризуется тремя углами сдвига (они парные, как и касательные напряжения)
xy yx , |
xz zx , |
yz zy . |