Найти: |
v |
? |
|
max |
? |
max |
|
|
|
|
|
M |
|
|
|
|
|
|
S |
|
l |
|
|
|
|
|
|
|
|
|
|
|
|
Решение
k |
2 |
|
S |
|
|
|
|
k |
2 |
v |
M |
|
S |
, |
|
|
|
|
|
|
EJ |
|
|
v |
|
EJ |
S |
|
|
|
x |
|
|
|
|
|
|
|
|
x |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
k |
2 |
v k |
2 |
M |
. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
v |
|
|
|
S |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
v C sin kz C |
cos |
1 |
2 |
|
|
общее решение |
v C1k cos kz C2k sin kz .
Для определения констант |
C |
, |
C |
2 |
запишем ГУ: |
1 |
|
1) |
при z 0, |
v 0; |
|
0 C |
0 C |
1 |
M |
|
C |
|
|
|
|
|
|
1 |
|
2 |
|
S |
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
2) |
|
|
0; |
|
C1k cos kl |
M |
k sin kl 0 |
|
|
|
|
|
|
|
при z l, v |
S |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
C2 |
|
|
|
|
Окончательно уравнение прогибов
|
|
|
|
|
|
v |
M |
tg kl sin kz |
M |
cos |
|
|
|
S |
|
S |
|
Максимальный прогиб будет при |
z |
kz |
M |
|
M |
tg kl sin kz cos kz 1 |
|
|
S |
S |
l |
|
|
|
|
|
|
|
M |
|
|
|
|
|
M sin |
2 |
kl |
|
|
|
|
|
v(l) |
|
|
|
|
|
|
|
|
max |
|
|
|
|
|
|
|
|
|
|
|
|
v |
S |
|
|
tg kl sin kl cos kl 1 |
|
S |
|
cos kl |
cos kl 1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
M |
|
|
|
|
|
|
|
M (1 cos kl) |
|
|
|
|
|
|
|
sin2 kl cos2 kl cos kl |
|
. |
|
|
|
|
|
|
|
|
|
|
|
|
S cos kl |
|
1 |
|
|
|
S cos kl |
|
|
Максимальный изгибающий момент
M x max Максимальное напряжение (сжатия)
M S vmax .
абсолютному значению
|
|
|
S |
|
M |
|
|
S |
|
M |
|
Sv |
. |
|
|
|
x max |
|
|
max |
|
|
|
|
|
|
|
|
|
|
|
|
|
max |
|
A |
|
W |
|
A |
|
W |
|
W |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
x |
|
|
|
x |
|
x |
|
Между нагрузками и напряжениями нет прямой пропорциональности
Как следствие нелинейности задачи, отпадает возможность применения принципа независимости действия сил: при раздельном (независимом)
учете продольной и поперечной нагрузок напряжения были бы определены неверно, так как третий член выражения бы отсутствовал.
Принцип суперпозиции НЕ применим!!!!
С учетом значения |
v |
max : |
M |
|
M S v |
M S |
M (1 cos kl) |
|
M |
x max |
|
|
|
max |
|
S cos kl |
cos kl |
|
|
|
|
Частные случаи: |
|
|
|
|
|
|
|
1) Если S 0 |
, то k |
S |
0 , |
M |
|
M |
|
|
x max |
|
|
|
|
|
|
|
|
|
|
EJ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
x |
|
|
|
|
|
|
|
2) Если kl |
|
, то |
M |
|
|
независимо от значения M. Значит |
|
2 |
x max |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
то есть |
v |
max |
|
, что характерно для потери устойчивости. |
|
|
|
|
|
|
|
Действительно, |
если kl |
, |
то |
S k 2 EJ x |
π2 EJ x |
, |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
(2l)2 |
что является критической силой Эйлера для рассмотренного стержня при потере устойчивости (изгибе) относительно оси x.
M |
|
EJ |
|
|
Sv M |
п |
. |
(1) |
x |
v |
x |
|
x |
|
|
|
|
|
|
|
|
Если нет продольной силы, то |
|
|
|
|
|
|
|
|
|
|
|
|
|
EJ |
|
|
|
M |
п |
, |
|
|
(2) |
|
|
x |
v |
x |
|
|
|
|
|
|
п |
|
|
|
|
|
индекс «п» соответствует нагружению стержня только поперечными нагрузками
(2) (1):
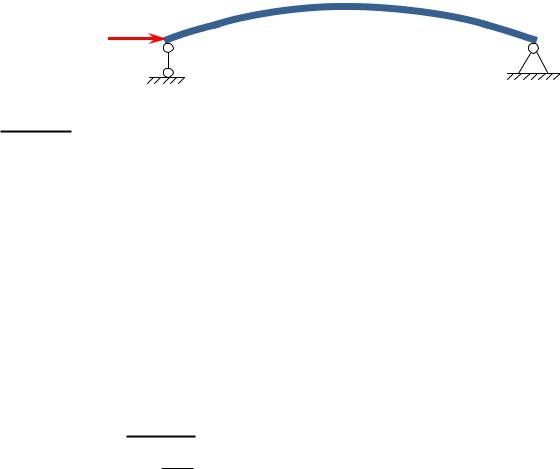
Допущение: форма упругой линии стержня как при отсутствии
продольных сил, так и при их наличии близка к синусоиде
где |
f , f |
п |
– максимальные прогибы. |
|
достаточной степенью точности можно
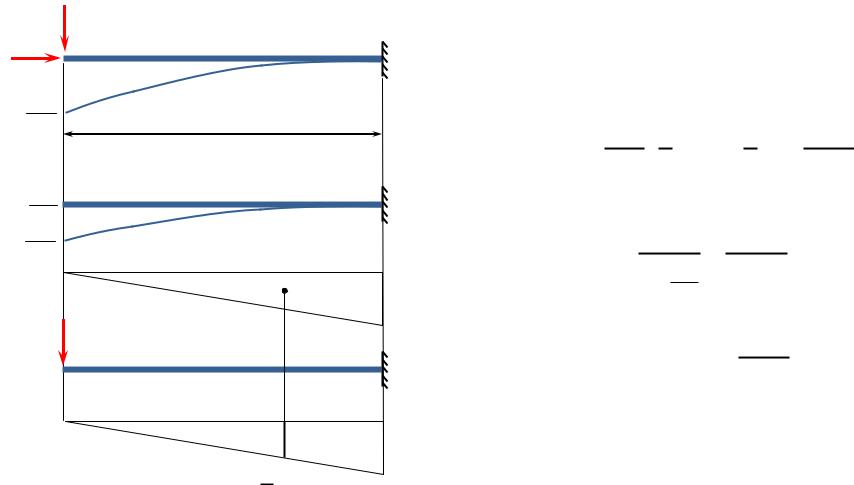
среднем сечении стержня при z l / 2.
Для рассматриваемой схемы с считать, что они имеют место в
|
|
2 |
|
z |
z |
|
|
2 |
|
z |
|
|
|
|
|
|
|
|
|
|
|
|
|
EJx |
l |
2 |
f sin |
l |
S f sin |
l |
EJx |
l |
2 |
fп sin |
l |
|
|
|
|
|
|
|
|
|
|
|
2EJ x f S f |
2EJ x |
f |
|
l2 |
l2 |
п |
|
SЭ
l
– сила Эйлера для рассматриваемого стержня с шарнирно
закрепленными торцами в плоскости расположения поперечной нагрузки.
(не |
Jmin , а |
J x , где x – ось, относительно которой изгибается стержень под |
|
|
действием поперечной нагрузки) |
S |
Э |
f |
п |
|
f |
fп |
|
или |
f |
k |
f |
п |
|
|
|
|
|
|
S |
|
|
Т |
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
SЭ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
– коэффициент С.П. Тимошенко.
Для других случаев закрепления стержня значение силы Эйлера
|
|
|
|
|
|
π |
2 |
EJ |
|
|
|
|
|
|
S |
|
|
|
x |
. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Э |
|
( l) |
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Прогиб в произвольном сечении |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
v f sin |
z |
k |
f |
|
|
sin |
z |
|
|
п |
|
|
|
|
l |
|
|
Т |
|
|
|
|
|
|
|
l |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Соответсвенно |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
k |
|
|
|
, |
M |
x |
|
k |
|
Т |
|
п |
|
|
|
|
|
|
|
|
|
Т |
|
Формула Тимошенко дает удовлетворительные результаты, когда
сжимающая сила |
S 0,8S |
Э и может использоваться при любой гибкости |
|
стержня λ (так как сила Эйлера SЭ здесь введена формально).
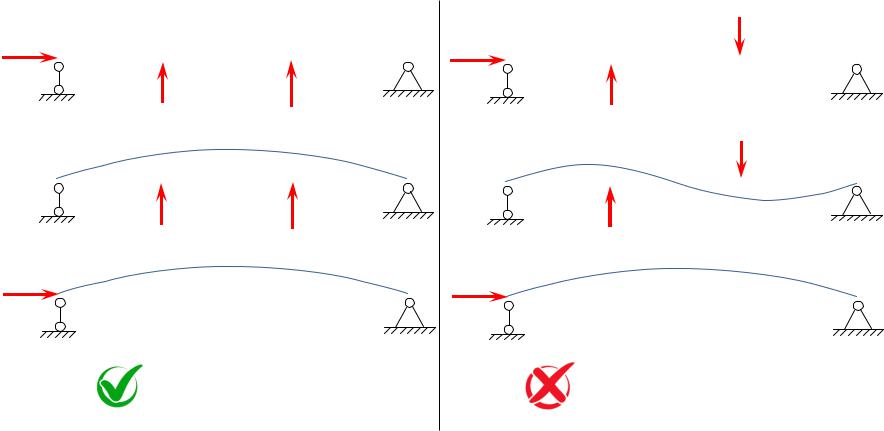
Метод применим при такой поперечной нагрузке, при которой изогнутые оси стержня при поперечном изгибе и потере устойчивости подобны.
Метод применим |
Метод НЕ применим |





 F
F F
F