

7.2.3.Представление топологических уравнений
Известен ряд методов формирования ММС на макроуровне. Получаемые с их помощью модели различаются ориентацией на те или иные численные методы решения и набором базисных, переменных, т.е. фазовых переменных, остающихся в уравнениях итоговой ММС. Общим для всех методов является исходная совокупность топологических и компонентных уравнений (7.1)-(7.2).
При записи топологических уравнений удобно использовать промежуточную графическую форму – представление модели в виде эквивалентной схемы, состоящей из двухполюсных элементов. Общность подхода при этом сохраняется, так как любой многополюсный компонент можно заменить подсхемой из двухполюсников. В свою очередь эквивалентную схему можно рассматривать как направленный граф, дуги которого соответствуют ветвям схемы. Направления потоков в ветвях выбираются произвольно (если реальное направление при моделировании окажется противоположным, то это приведет лишь к отрицательным численным значениям потока).
Пример некоторой простой эквивалентной схемы и соответствующего ей графа приведен на рис. 7.5. Для конкретности и простоты изложения на рис. 7.5 использованы условные обозначения, характерные для электрических эквивалентных схем, по той же причине далее в этом параграфе часто применяется электрическая терминология. Очевидно, что поясненные выше аналогии позволяют при необходимости легко перейти к обозначениям и терминам, привычным для механиков.
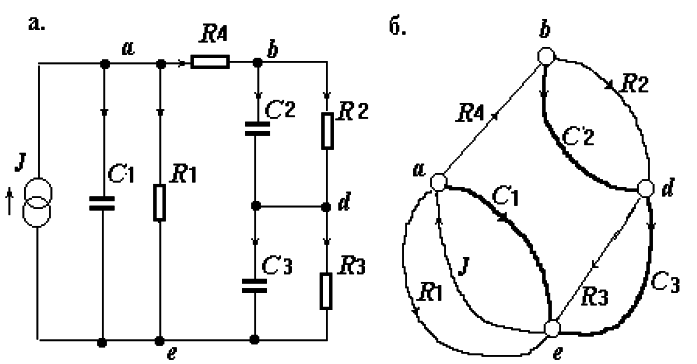
Рисунок 7.5 - Эквивалентная схема (а) и ее граф (б)
Для получения топологических уравнений все ветви эквивалентной схемы разделяют на подмножества хорд и ветвей дерева. Имеется в виду покрывающее (фундаментальное) дерево, т.е. подмножество из β-1 дуг, не образующее ни одного замкнутого контура, где β – число вершин графа (узлов эквивалентной схемы). На рис. 7.5,б показан граф эквивалентной схемы рис. 7.5,а, толстыми линиями выделено одно из возможных покрывающих деревьев.
Выбор дерева однозначно определяет вектора напряжений Ux и токов IХ хорд, напряжений Uвд токов IВД ветвей дерева и приводит к записи топологических уравнений в виде
-

7.13
7.14
где М – матрица контуров и сечений, Мт – транспонированная М-матрица.
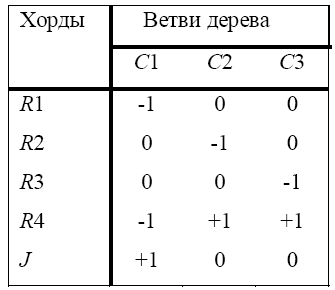
В М-матрице число строк соответствует числу хорд, число столбцов равно числу ветвей дерева. М-матрица формируется следующим образом. Поочередно к дереву подключаются хорды. Если при подключении к дереву р-й хорды q-я ветвь входит в образовавшийся контур, то элемент Mpq матрицы равен +1 при совпадении направлений ветви и подключенной хорды, Mpq= -1 при несовпадении направлений. В противном случае Mpq = 0.
Для схемы на рис. 7.5 М-матрица представлена в виде табл. 7.1
Таблица 7.1 – М-матрица
7.2.4.Особенности эквивалентных схем механических объектов.
Для каждой степени свободы строят свою эквивалентную схему. Каждому телу с учитываемой массой соответствует узел схемы (вершина графа). Один узел, называемый базовым, отводится телу, отождествляемому с инерциальной системой отсчета.
Каждый элемент массы изображают ветвью, соединяющей узел соответствующего массе тела с базовым узлом; каждый элемент упругости – ветвью, соединяющей узлы тел, связанных упругой связью; каждый элемент трения – ветвью, соединяющей узлы трущихся тел. Внешние воздействия моделируются источниками сил и скоростей.

Рисунок 7.6 – Простая механическая система:
а - эскизное изображение; б - эквивалентная схема
В качестве примера на рис. 7.6,а изображена некоторая механическая система – тележка, движущаяся по дороге и состоящая из платформы А, колес В1, В2 и рессор С1, C2. На рис. 7.6,б приведена эквивалентная схема вертикальных составляющих сил и скоростей, на которой телам системы соответствуют одноименные узлы, учитываются массы платформы и колес, упругость рессор, трение между колесами и дорогой; неровности дороги вызывают воздействие на систему, изображенную на рис. 7.6,б источниками силы.