

Приложение 2
Физические основы работы электродвигателей постоянного тока
ГЕНЕРАТОРЫ И ЭЛЕКТРОДВИГАТЕЛИ - это машины вращательного типа, преобразующие либо механическую энергию в электрическую (генераторы), либо электрическую в механическую (двигатели).
Действие генераторов основано на принципе электромагнитной индукции: в замкнутом витке провода, движущемся в магнитном поле, наводится электродвижущая сила (ЭДС). ЭДС численно равна работе, совершаемой стороннми силами при перемещении по проводнику еденичного положительного заряда из точки 1 в точку 2. Работа производится за счет энергии, затрачиваемой в источнике. В генераторе работа сторонних сил совершается за счет механической энергии, затрачиваемой на вращение ротора.
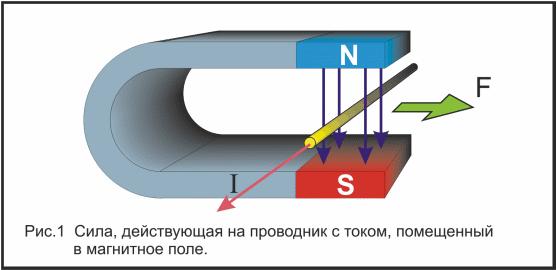
Действие электродвигателей основано на том, что, на провод с током, помещенный в поперечное магнитное поле, действует сила F (см. рис. 1). Направление силы F можно определить по "правилу левой руки". Если левую руку расположить так, что силовые линии магнитного поля будут входить в ладонь, а пальцы указывают направление тока в проводнике, то большой палец укажет направление силы, действующей на проводник.
Создание силы, действующей на проводник
Существует два условия, которые необходимо выполнить для создания силы, действующей на проводник:
По проводнику должен протекать электрический ток
Проводник должен быть помещен в магнитное поле
При выполнении этих условий появляется сила, которая пытается двигать проводник в направлении перпендикулярном направлению магнитного поля (см. рис. 1). Это основной принцип, положенный в основу работы всех двигателей постоянного тока.
Принцип работы
Каждый токонесущий проводник имеет магнитное поле вокруг себя. Направление этого поля может быть найдено, используя "правило правой руки" для проводника с электрическим током.
К огда
большой палец правой руки указывает в
направлении движения тока, то пальцы
указывают
направление магнитного поля, создаваемого
этим
проводником (см. рис. 2).
огда
большой палец правой руки указывает в
направлении движения тока, то пальцы
указывают
направление магнитного поля, создаваемого
этим
проводником (см. рис. 2).
Если проводник с током поместить в магнитное поле, то комбинированное поле будет иметь вид, как показано на рисунке 3. Направление тока в проводнике показывается "+" или "•". "+" показывает, что ток идет от нас, т.е. от читателя в страницу (символизирует оперенный конец стрелы). "•" показывает, что ток направлен к нам, т.е. со страницы в нашу сторону (символизирует острие стрелы, летящей навстречу).
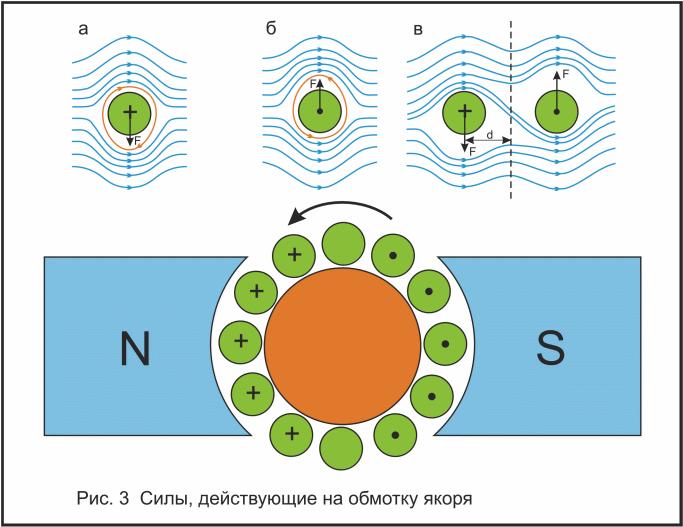
Принцип действия электродвигателя иллюстрирует рис. 3. На рис. 3,а провод с током, направленным от читателя, перпендикулярен магнитному полю, существующему между магнитными полюсами N и S. Магнитный поток вокруг провода, создаваемый его током, направлен по часовой стрелке (правило правой руки). Ниже проводника магнитное поле, созданное проводником, противоположно главному полю и поэтому противостоит ему. Выше проводника поле, созданное проводником, имеет то же направление, что и основное магнитное поле и поэтому помогает ему. В результате ниже проводника поле ослаблено или плотность магнитного потока уменьшена, а выше проводника магнитное поле усилено или плотность магнитного потока увеличена. Таким образом, создается сила, что движет проводник в направлении ослабленного поля. Можно представить, что магнитные силовые линии, подобно упругим нитям, стремящимся сократиться, действуют на провод с силой F, направленной вниз.
Когда ток в проводе направлен так, как показано точкой на рис. 3,б, магнитное поле усиливается под проводом и ослабляется над ним, и сила F, действующая на провод, направлена вверх.
На рис. 3,в изображен простой виток провода, расположенный параллельно оси полюсов. В этом случае возникает вращающий момент 2Fd, стремящийся повернуть виток против часовой стрелки. Чтобы такое вращение поддерживалось, направление тока в витке должно измениться на обратное, когда последний перейдет через вертикальное положение. Для этого необходим коллектор (см. рис. 4), изменяющий направление тока после каждой половины оборота.

Сила, которая действует на проводник якоря двигателя, создается суммарным действием магнитных полей обмоток возбуждения и якоря. Величина силы действия на проводник с током прямо пропорциональна величине главного магнитного поля, создаваемого обмоткой возбуждения, и величине магнитного поля, создаваемого проводником с током. Сила поля вокруг каждого проводника с током зависит от величины тока, протекающего по нему. Поэтому момент, создаваемый двигателем, может быть определен, используя следующую формулу
М = КФIя
где
М - момент, кг-м
К- константа, зависящая от размеров двигателя
Ф- магнитный поток обмотки возбуждения, прямо пропорциональный току
Iя- ток якоря
Явление генератора в двигателе
Генераторные явления происходят в каждом двигателе. Когда проводник пересекает магнитные силовые линии, электродвижущая сила индуктируется в этом проводнике.
Ток, в начале разворота якоря, будет иметь направление, обусловленное приложенным напряжением от источника постоянного тока. С началом вращения якоря проводники начинают пересекать магнитные силовые линии. Электродвижущая сила, индуктируемая в обмотке якоря создает в нем ток, имеющий обратное направление току, вызванному источником питания. Э.Д.С., индуктируемая в результате работы электродвигателя, носит название противоэлектродвижущей силы. Противо ЭДС создает сопротивление вращению ротора двигателя. Это явление используется для подтармаживания двигателя сервопривода СУЗ, например, в конце пути перемещения стержня СУЗ. Для этого схема управления СП замыкает якорную цепь, а на обмотку возбуждения подается пониженое напряжение или не подается, в этом случае используется остаточное магнитное поле в обмотке возбуждения.
Так как противоэлектродвижущая сила создается в результате пересечения силовых линий магнитного поля обмоткой якоря, то величина ее будет зависеть от величины напряженности магнитного поля обмотки возбуждения и скорости вращения якоря.
Епр.ЭДС = КФN
где:
Е пр.Э.Д.С- индукитруемая Э.Д.С
К -константа
Ф - величина магнитного потока обмотки возбуждения
N - скорость вращения якоря
Противоэлектродвижущая сила противостоит приложенному напряжению и стремится снизить ток в якоре. Результирующее напряжение, действующее в якоре двигателя, равняется приложенному напряжению минус противо Э.Д.С. Ток в якоре может быть определен, используя закон Ома.