

Конструкция сервопривода Сб. 151
Сервопривод сб. 151 используется в исполнительных механизмах РР, ЛАР, АР. В сервоприводе применен электромеханический привод стержней СУЗ с преобразователем вращения "барабан – лента". В приводе применен электродвигатель постоянного тока, мощность которого 500 Вт и скорость вращения якоря 2500 об/мин. В двигатель встроена электромагнитная муфта, стопорящая ротор. Сервопривод представляет собой герметичное электромеханическое устройство, которое изображено на Рис. 2 -21. Кинематическая схема привода изображена на рисунке Рис. 2 -22.
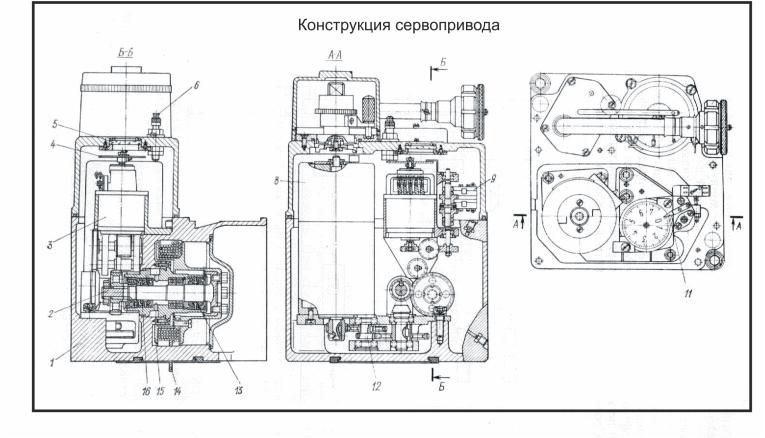
Рис. 2‑21 Конструкция сервопривода СУЗ
Сервопривод РБМ-К7 сб. 151 состоит из литого корпуса 1 (см. Рис. 2 -21), выполненного из алюминиевого сплава, в котором смонтированы все элементы, показанные на кинематической схеме (см. Рис. 2 -22). На валу 2 (Рис. 2 -21), укрепленном на шарикоподшипниках, смонтирован барабан 15, на который наматывается стальная лента 14. Лента крепится на барабане с помощью эксцентрика. Другой конец ленты с помощью клинового замка укреплен в захвате, соединенном с амортизатором (п. ). Ширина ленты 40 мм, толщина - 0,25 мм, полная длина 7895 мм. Вал получает вращение от электродвигателя 8 (Д500-МФ (2 серия)) через редуктор 12, с которым также связаны сельсин 3 типа БД-404НА и кулачки, воздействующие на концевые выключатели 9. Редуктор 12 состоит из трех пар цилиндрических и одной пары конических шестерен. Герметизация вала 2 от охлаждающей воды осуществляется манжетными уплотнениями 13 и 16.
На валу сельсина 3 укреплен циферблат 4, а в корпусе установлена стрелка 11. Циферблат со стрелкой образуют встроенный указатель положения, по которому можно установить положение стержня-поглотителя. Шкала встроенного механического указателя положения стержня проградуирована от 0 до 7000 мм. За показаниями на шкале можно наблюдать через стекло 5.
На валу электродвигателя 8 установлен упор для сцепления с поводком привода, которым можно воспользоваться для перемещения стержня-поглотителя в случае выхода из строя электродвигателя. В крышке корпуса установлен ручной привод, предназначенный для подъема и опускания стержня вручную. Валик ручного привода опускается и входит в зацепление с валом электродвигателя. Подъем или опускание стержня вручную производится вращением храповика с помощью специальной рукоятки с отверстием под квадрат 1919 мм. Храповик от проворачивания стопорится "собачкой", отжимаемой вручную при работе рукояткой. Переключатель режима работы и сам ручной привод закрыты навинчиваемой крышкой.
В корпус привода через ниппель 6 закачивается сухой азот под избыточным давлением 1,1 кгс/см2, предотвращающий попадание внутрь корпуса воды из канала СУЗ.
Подвод питания к приводу осуществляется специальным электроразъемом 10, состоящим из гибкого металлорукава, на одном конце которого герметично установлена розетка. В нерабочем положении розетка закрыта крышкой. Другой конец металлорукава герметично запаян в плиту электроразъема, которая крепится к корпусу привода.
Температура электродвигателя контролируется приклеенным к его корпусу датчиком типа ИС-543 (термометр-сопротивление), который по трехпроводной схеме выведен на электрический разъем сервопривода.
Максимальная температура сервопривода ограничена величиной 85 0С из условия гарантированного срабатывания электромагнитной муфты.
Рассмотрим работу привода, используя кинематическую схему (см. Рис. 2 -22). Исполнительный механизм приводится в действие электродвигателем постоянного тока 4, имеющим встроенную электромагнитную муфту, тормозящую вал электродвигателя при подаче напряжения на обмотку электромагнита муфты. Когда двигатель не работает, муфта затормаживает его вал. Электродвигатель через редуктор 5 передает вращение на барабан 6, на который наматывается (или сматывается) лента, связанная со стержнем-поглотителем. Через кинематическую передачу 1 вращение передается сельсин-датчику 8 и кулачкам 3, воздействующим на микровыключатели 2 крайнего верхнего (ВК), крайнего нижнего (НК) положений стержня и промежуточного включения торможения (ПВТ). Микровыключатели ВК и НК являются датчиками крайних положений регулирующего органа, а сельсин-датчик 8 – датчиком текущих положений регулирующего органа. Коммутация цепей питания электродвигателя и электромагнитной муфты осуществляется индивидуальной схемой управления сервоприводом (см. п. 2).
Микровыключатель ПВТ является датчиком, который определяет момент включения промежуточного торможения привода. После срабатывания датчика ПВТ двигатель работает в режиме электродинамического торможения (ЭДТ) ослабленным током возбуждения электродвигателя (см. п. ; приложение 2, генераторные явления в двигателе). ЭДТ необходимо при вводе стержня в активную зону для уменьшения кинетической энергии стержня, что предотвращает его разрушение на конечном участке пути. ЭДТ реализуется с помощью схемы, смонтированной внутри привода. Торможение двигателя СП в конце пути необходимо также для исключения отказов СП при вводе стержня в активную зону с большой скоростью. Вероятность таких отказов вызвана следующими причинами. Если стержень сбросить с ВК без ЭДТ, то сначала поглотитель будет двигаться быстрее, чем вытеснитель, т.к. вытеснитель не имеет отверстия и двигается в воде как поршень, в результате чего испытывает достаточно большое сопротивление со стороны воды (см. п. ). Поглотитель под собственным весом разгоняется, догоняет вытеснитель, ударяется об него и резко тормозится. При этом барабан СП уже имеет достаточно большую скорость (его разогнал поглотитель), барабан по инерции продолжает вращаться, лента ослабляется, распушается на барабане и может захлестнуться и заклинить барабан. Во избежании этого ПВТ должен сработать раньше, чем поглотитель ударится о вытеснитель. При срабатывании ПВТ включается режим ЭДТ, двигатель тормозится, и лента будет постоянно натянута.

Рис. 2‑22 Кинематическая схема исполнитльного механизма СУЗ
Перевод сервопривода на ручное управление производится переводом переключателя режима работы из положения "Электр." в положение "Ручное". При этом в сервоприводе срабатывает микровыключатель КВР, с помощью которого контролируется обрыв цепи "блок управления – сервопривод". Срабатывание КВР формирует сигнал неисправности блока управления, и включаются лампы НК и ВК в указателе положения на БЩУ.
Перевод сервопривода на ручное управление сопровождается включением сигнализации НК и ВК в указателе положения на БЩУ.
При отсутствии команд на подъем или опускание стержня электрические цепи якоря и обмотки возбуждения электродвигателя обесточены, цепь обмотки электромагнитной муфты находится под напряжением, а барабан с лентой и стержнем – в заторможенном состоянии.
Сервопривод сб. 151 в комплекте со стержнем-поглотителем имеет в целом неуравновешенную кинематику. Удержание стержня при остановке его в любом промежуточном положении в пределах рабочего хода осуществляется электромагнитной тормозной муфтой.
В случае исчезновения напряжения на муфте, стержень с ускорением опускается вниз под действием собственного веса и останавливается после полного разматывания ленты.
Опускание стержня при дистанционном управлении с БЩУ происходит следующим образом. Сигнал от ключа управления, расположенного на пульте ВИУР, обрабатывается логическими схемами СУЗ и подеется в схему управления выбранного стержня СУЗ. Схема управления сервоприводом разрывает цепь подачи напряжения на муфты, и привод под действием веса стержня начинает опускать стержень. При этом на обмотку возбуждения подано пониженное напряжение, цепь обмотки якоря замкнута, напряжение на нее от источника питания не подается. В результате, в обмотке якоря возникает ток генерации, направление которого противоположно направлению тока в двигательном режиме. В этом режиме ротор испытывает сопротивление со стороны магнитного поля обмотки возбуждения, скорость движения стержня уменьшается, что предотвращает ускоренное движение стержня вниз. При срабатывании микровыключателя ПВТ включается схема электродинамического торможения, реализованная внутри сервопривода. При размыкании контактов нижнего концевого микровыключателя НК или при снятии команды управления снимается напряжение с обмотки возбуждения и подается питание на муфту – стержень затормаживается.
В режиме "АЗ-5", "БАЗ" ускоренный ввод стержня в активную зону обеспечивается разомкнутой цепью обмотки якоря до момента срабатывания микровыключателя ПВТ, после чего сервопривод работает в режиме ЭДТ. Время ввода – не более 14 с.
Кластерный регулирующий орган сб. 2399 (см. п. ) функционирует в составе модернизированного штатного СП типа РБМ-К7 сб. 151 или РБМ-К9 сб 151. Модернизация заключается в организации клапана в корпусе СП, который предназначен для периодического контроля давления в полости гильзы КРО сб. 2399 (контроль герметичности гильзы) и сброса давления пара в гипотетической ситуации разгерметизации гильзы и попадания воды в гильзу.