

3Принципы построения систем управления Общие положения
Общность и единство процессов управления и связи в машинах, организмах и обществе изучаются общей наукой об управлении - кибернетикой. Основные ее принципы были впервые сформулированы американским ученым Норбертом Винером. Использование этих принципов позволяет построить различные системы управления: технические, информационные, хозяйственные, учебные и др. Рассмотрим основные принципы построения систем управления.
В кибернетике под системой управления понимают совокупность таких элементов, как объект управления, измерительные и вычислительно-управляющие устройства, операторы (люди), связанные между собой цепью управления. Если человек исключен из контура управления, то мы имеем дело с системами автоматического управления (САУ). Если системы содержат в качестве управляющих устройств ЭВМ, то они называются автоматизированными (АСУ).
Все сведения о системе управления в процессе ее работы называют информацией. Объем информации в системе управления предопределяет степень ее автоматизации, например в АСУ объем информации настолько велик, что для ее обработки требуется использование ЭВМ, так как человек не в состоянии производить ее обработку с необходимой скоростью.
Процесс передачи информации в системе называется связью. Если информация передается от управляющего устройства объекту, связь называется прямой, а от объекта управляющему устройству - обратной. Если процесс управления осуществляется без обратной связи, система называется разомкнутой, при наличии обратной связи - замкнутой. Наибольшее распространение получили системы с обратной связью (Рис. 3 -24).
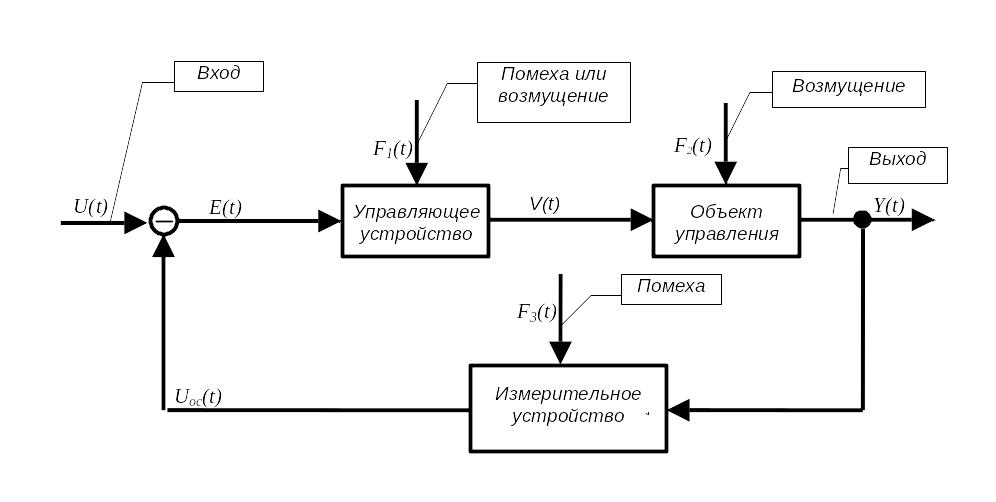
Рис. 3‑24 Структурная схема САУ
Информация в таких системах передается с помощью непрерывно изменяющихся сигналов. Системы, в которых сигналы изменяются непрерывно во времени, называют аналоговыми. На вход системы подается сигнал U(t), по которому с помощью управляющего устройства изменяется выходной регулируемый параметр Y(t). В управляющем устройстве при подаче сигнала ошибки E(t) вырабатывается сигнал V(t), который подается на вход объекта управления. Разность между входным задающим сигналом U(t) и сигналом обратной связи Uoc(t) называют ошибкой.
Обратная связь называется положительной, если ее сигнал Uoc(t) усиливает действие входного сигнала U(t).
Обратная связь называется отрицательной, если ее сигнал ослабляет действие входного сигнала, т. е. уменьшает значение ошибки E(t). Как правило, все САУ имеют отрицательную обратную связь.
Если U(t) неизменно во времени, САУ называют стабилизаторами, если U(t) изменяется по заданной программе - системой с программным управлением, а если U(t) изменяется по произвольному закону - следящими системами.
На реальные системы управления в процессе их работы действуют различные помехи и возмущения. Если возмущения приходят снаружи данного контура управления, то их называют внешними, если возникают внутри системы - внутренними.
Системы управления должны обладать помехоустойчивостью и надежностью. Способность системы управления выполнять свои функции в условиях помех называют помехоустойчивостью. Свойства системы выполнять заданные функции в течение определенного промежутка времени называют надежностью.