

Задатчик мощности ЗдМ.5
Задатчик мощности ЗдМ.5 предназначен для задания необходимого уровня мощности в схемах АРМ-АЗММ, АР-АЗМ. ЗдМ.5 представляет собой дистанционно управляемый источник напряжения, которое затем во входных каскадах УЗМ.11 измерительной части АРМ-АЗММ, АР-АЗМ преобразуется в ток. Полученный таким образом ток является уставкой заданной мощности.
Входными сигналами прибора являются (см. Рис. 6 -59):
сигналы управления задатчиком с рабочей скоростью (формируются в логике ТЭЗ Л.26 (см. Рис. 7 -91) при поступлении на ее вход сигналов от КУЗ на ПО или ЩЭП, сигнала на снижение уставки из логики ЛАЗ (ТЭЗ Л.31, Рис. 7 -96));
сигнал, разрешающий увеличение уставки задатчика (формируются в логике ТЭЗ Л.26);
сигнал на снижение уставки задатчика мощности с аварийной скоростью (формируется в логике ТЭЗ Л.10 (см. Рис. 7 -93) при поступлении на ее вход сигналов АЗ-1,2, сигнала от кнопки УСМ на ПО);
Выходными сигналами прибора являются:
сигнал уставки уровня мощности в виде напряжения постоянного тока в пределах от -5 до -120 В, линейно изменяющегося во времени (с одним изломом характеристики в точке 20В) по командам схемы управления ЗдМ.5; сигнал поступает во входные цепи усилителей УЗМ.11 и УСО.10;
напряжение постоянного тока, пропорциональное уставке мощности - в схему блока синхронного перемещения БСП.36;
сигнал в виде напряжения переменного тока прямоугольной формы частотой 1 кГц в схему прибора КрУ.4 в цепи относительной и абсолютной коррекции уставки мощности (режим абсолютной коррекции не используется);
сигнал постоянного тока на указатель заданной мощности на ПО, пропорциональный заданному уровню мощности и равный 0,96 мА для уставки 120 % номинального уровня;
сигналы неисправности прибора в контактной форме на засветку лампы "Неисправность" на лицевой панели прибора и в потенциальном виде - в логические схемы АР (ТЭЗ Л.1, Рис. 7 -84, ТЭЗ Л.4 на Рис. 7 -86), АЗМ (ТЭЗ Л.21, Рис. 7 -105), АЗ-Т2 (ТЭЗ Л.22, Рис. 7 -101);
сигналы "N 60%", "N 50%", "N 20%" в контактной форме в логическую схему формирования сигналов "АЗ-1", "АЗ-2"; "УСМ" (ТЭЗ Л.10) и схемы технологической автоматики.
ЗдМ.5 обеспечивает следующие скоростные характеристики изменения уставки:
от 5% до 20% за (100±10) сек; 0,15 В/с (0,15% Nном /с);
от 20% до 120% за (400±10) сек; 0,25 В/с (0,25% Nном /с)
от 100% до 5% за 50 сек (2 % Nном/c) - в режиме ускоренного снижения уставки (для АР основного диапазона и ЛАР).
Задатчик мощности функционально представляет собой дистанционно управляемый стабилизированный источник напряжения. Основным задающим элементом прибора является блок из 2-х вращающихся трансформаторов (ТрВ1 и ТрВ2), включенных по линейной схеме (блок БВТ на Рис. 6 -59).
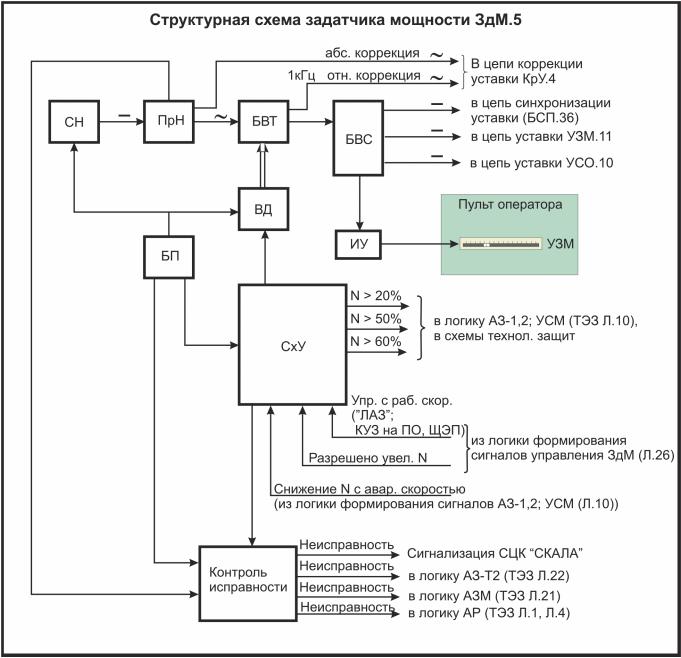
Рис. 6‑59 Структурная схема задатчика мощности ЗдМ.5
СН - стабилизатор напряжения; ПрН- преобразователь напряжения; БВТ - блок синусно-косинусных вращающихся трансформаторов; БВС- блок выходных сигналов; ВД - блок двигателей и привода вращающихся трансформаторов; ИУ - измеритель уставки; БП - блок питания; СхУ - схема управления.
Вращающийся трансформатор - это индукционная электрическая машина переменного тока, изменяющая коэффициент трансформации пропорционально углу поворота ее ротора. При включении обмоток статора и ротора по линейной схеме обеспечивается линейная зависимость коэффициента трансформации от угла поворота ротора в определенных пределах угла поворота. Роторы обоих трансформаторов жестко связаны и поворачиваются двигателем, управляемым из схемы управления (СхУ).
От блока питания ЗдМ.5 (БП) постоянное напряжение подается на стабилизатор напряжения (СН) и далее - на преобразователь напряжения постоянного тока в переменный (ПрН). Полученное переменное напряжение является питающим для статорных обмотки трансформаторов ТрВ1 и ТрВ2.
Для питания цепи абсолютной коррекции уставки в корректоре уставки КрУ.4 (см. п. ) снимается напряжение переменного тока постоянной амплитуды частотой 1кГц с выходного трансформатора преобразователя напряжения (ПрН) и остается неизменным. Поэтому коррекция сигнала ЗдМ в цепях КрУ.4 на основе этого сигнала называется абсолютной.
Для питания цепи относительной коррекции в КрУ.4 и формирования сигнала уставки, поступающего в измерительную часть 1,2 АР, используется переменное напряжение с выходов блока вращающихся трансформаторов (БВТ). Напряжение на выходе БВТ зависит от угла поворота жестко связанных роторов вращающихся трансформаторов ТрВ1 и ТрВ2. Напряжение частотой 1 кГц, снимаемое с ротора трансформатора ТрВ1 подается в цепь относительной коррекции КрУ.4, с ротора ТрВ2 – на размножающий трансформатор блока выходных сигналов (БВС). В БВС переменное напряжение преобразуется в постоянное и подается в схему измерения уставки (ИУ) с выводом показаний на указатель заданной мощности (УЗМ) на пульте оператора и во внешние цепи:
в усилитель сигнала отклонения (УСО.10);
в усилитель защиты по превышению мощности (УЗМ.11);
в блок синхронизации уставок (БСП.36) (только в схеме 1,2АР).
Поворот жестко связанных роторов ТрВ1 и ТрВ2 производится дистанционно механическим блоком, состоящим из 2-х электродвигателей с дифференциальным редуктором и схемы управления электродвигателями.
Схема управления электродвигателями включает в себя:
два двигателя переменного тока, один из которых предназначен для поворота роторов вращающихся трансформаторов с рабочей скоростью 0,3 %Nном/сек, другой - для поворота роторов только на снижение уставки со скоростью 2 %Nном/сек (аварийная скорость);
концевые выключатели МП1 и МП2 (105% и 5%);
промежуточные путевые выключатели МП3МП5, срабатывающие при 20%, 50%, 60% Nном (20В, 50В, 60В);
дифференциальный редуктор, позволяющий осуществить поворот роторов вращающихся трансформаторов от двигателей, имеющих различную скорость вращения;
релейно-контактную схему (СхУ на Рис. 6 -59) для выполнения алгоритмов изменения уставки на основе сигналов, поступающих из логических схем СУЗ (излом характеристики ЗдМ.5 на 20% Nном, разрешение увеличивать уставку, изменение уставки с рабочей скоростью, быстрое снижение уставки).
Сигнал неисправности ЗдМ.5 формируется схемой контроля исправности, срабатывающей при:
отсутствии напряжения питания цепи уставки;
отсутствии напряжения питания электродвигателей.
неисправностях стабилизатора напряжения (СН), вызывающих пробой или насыщение регулирующего транзистора преобразователя напряжения.
Сигнал неисправности ЗДМ.5 поступает в схему сигнализации СЦК "СКАЛА", в логические схемы контроля исправности АР (ТЭЗ Л.1, Рис. 7 -84), АЗМ (ТЭЗ Л.21, Рис. 7 -105), АЗ-Т2 (ТЭЗ Л.22, Рис. 7 -101).