

2192
.pdf5. КИНЕМАТИКА АБСОЛЮТНО ТВЕРДОГО ТЕЛА. РАСЧЕТНО-ГРАФИЧЕСКАЯ (КОНТРОЛЬНАЯ) РАБОТА
ОПРЕДЕЛЕНИЕ СКОРОСТЕЙ И УСКОРЕНИЙ ТОЧЕК ТВЕРДОГО ТЕЛА ПРИ ПОСТУПАТЕЛЬНОМ И ВРАЩАТЕЛЬНОМ ДВИЖЕНИЯХ
5.1. Методические рекомендации к выполнению расчетно- Сграфических (контрольных) работ
При решен задач на вращательное движение твердого тела вокруг
неподв жной оси встречаются задачи двух основных типов. уравнениеПервый т п задач – дано уравнение вращательного движения твердого тела, требуется определить угловую скорость, угловое ускорение,
скорость ускорен точки твердого тела.
Алгор тм решен я такого рода задач следующий:
3.Д фференцбруя по времени угол поворота, определяем проекцию угловой скорости на осьАвращения.
4.Вычисляя вторую производную от угла поворота по времени, определяем проекцию углового ускорения на ось вращения.
5.Пользуясь выражением проекции угловой скорости на ось вращения, вычисляем скорость точки и ее нормальное ускорение.
6.Пользуясь выражением проекцииДуглового ускорения на ось вращения, определяем касательное ускорение точки.
7.Используя найденные нормальное и касательное ускорения, находим полное ускорение точки по величине и направлению.
Второй тип задач – задано угловое ускорение или угловая скорость твердого тела; требуется найти уравнение Ивращательного движения, скорость и ускорение точки твердого тела.
В этом случае алгоритм решения задач следующий:
1.Интегрируя дифференциальное уравнение, определяющее проекцию углового ускорения на ось вращения, находим проекцию угловой скорости, произвольную постоянную интегрирования определяем по начальным данным.
2.Интегрируя дифференциальное уравнение, определяющее проекцию угловой скорости на ось вращения, находим уравнение вращательного движения твердого тела, произвольную постоянную интегрирования определяем по начальным данным.
3.Пользуясь выражением проекции угловой скорости на ось вращения, вычисляем величину скорости и нормального ускорения точки.1. Выб раем с стему координат так, чтобы одна из осей совпадала с
51
4. Определяем величину касательного ускорения точки, зная проекцию углового ускорения на ось вращения, и далее находим полное ускорение точки.
Задачи на преобразование простейших движений предполагают следующую последовательность действий:
1. Исходя из условия задачи, надо выписать уравнение движения или другие кинематические соотношения для того твердого тела, движение которого известно.
2. Пользуясь формулами кинематики точки и кинематики вращения твердого тела вокруг неподвижной оси, найти уравнение движения другого твердого тела, которому передается движение, а также найти скорости и
ускорен я разл чных точек этого тела. |
|
С |
|
5.1.1. К немат ка вращательных передаточных механизмов |
|
Передаточные мех |
служат для преобразования и передачи |
анизмы |
|
вращен я от одного звена (ведущего) к другому (ведомому). Простейшие передаточные механ змы прео разуют движения:
|
вращательное движение во вращательное (пример – редуктор); |
|
|
А |
винтовая |
вращательное движение в поступательное (пример – |
||
пара); |
б |
|
поступательное движение во вращательное (пример – двигатель внутреннего сгорания, в котором поступательное движение поршней преобразуется во вращательное движениеДколенчатого вала);
поступательное движение в поступательное (пример – клиновой механизм).
Рассмотрим передаточный механизм, состоящий из двух колёс с параллельными осями, перпендикулярными плоскостям колёс (рис. 1). Преобразование вращения одного твёрдого телаИвокруг неподвижной оси во вращение второго твёрдого тела вокруг другой неподвижной оси осуществляют посредством зубчатого или фрикционного (за счёт сил трения) зацепления двух колёс или при помощи ременной передачи.
При внутреннем зацеплении (рис. 1,б) и нескрещивающейся ременной передаче (рис. 1,в) направления вращений обоих колёс совпадают; при внешнем зацеплении (рис. 1,а) и скрещивающейся ременной передаче (рис. 1,г) направления вращений колёс противоположны.
52

Си
Путь, бпройденный точками на ободах дисков, находящихся в зацеплении, одинаков. На этом основании запишем уравнение связи. Напомним, что длина дуги, угол поворота и радиус связаны формулой S r . Тогда для всех типов зацепления имеем условия равенства дуг
разных тел
|
1r1 2r2 . |
|
(1) |
||||||||
Дифференцируя по времени правые и левые части полученного |
|||||||||||
уравнения связи, найдемА, что модули скоростей на ободах дисков, |
|||||||||||
находящихся в зацеплении, равны, если нет скольжения ремня по диску: |
|||||||||||
1r1 2r2 , |
|
r1 , r2 |
(2) |
||||||||
здесь 1 , 2 – модули угловых скоростей; |
– радиусы дисков. |
||||||||||
|
|
|
|
|
|
|
|
|
|
|
И |
Угловые скорости дисков обратноДпропорциональны числам зубьев zi, |
|||||||||||
или радиусам ri, или диаметрам di. |
|
|
|
|
|
|
|
||||
1 |
r2 |
z2 |
d2 , |
(3) |
|||||||
|
|||||||||||
|
2 |
r |
|
|
|
z |
|
|
d |
1 |
|
|
1 |
|
1 |
|
|
|
|||||
где d1, d2 – диаметры дисков; z1, z2 – |
числа зубьев на дисках. |
||||||||||
Отношение угловых скоростей колес называют передаточным |
|||||||||||
отношением |
|
|
|
|
|
|
|
|
|
|
|
u |
1 |
; |
|
u |
|
|
|
2 . |
(4) |
||
|
|
|
|
||||||||
12 |
|
|
2 |
|
|
|
21 |
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
Часто применяют соединение колёс, когда два колеса жёстко соединены друг с другом нерастяжимой нитью (цепью, ремнем).
53
5.1.2. Кинематика зубчатой передачи
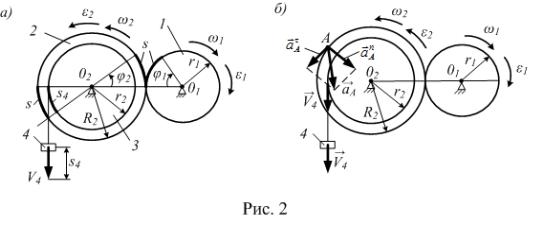
Для спуска груза 4 диск 1 вращается вокруг неподвижной оси, проходящей через его центр O1 , перпендикулярно плоскости диска,
согласно уравнению 1 t t 2 |
(рис. 2,а), и приводит во вращение диски |
С |
|
2 и 3, жёстко скрепленные друг с другом и имеющие общую неподвижную |
|
ось вращения. |
|
и |
|
Д ски 1 |
|
2 являются зу чатой передачей. |
|
|
|
|
|
|
|||||||||||
Определить скорость и ускорение груза 4, ускорение точки А в |
|||||||||||||||||||
момент временибt=5 с, если r1=0,2 м; R2=0,4 м; r2=0,3 м (рис. 2,б). |
|
||||||||||||||||||
Сначала определим угловую скорость и угловое ускорение диска 1. |
|
||||||||||||||||||
В момент времени t=5 с определим модуль угловой скорости |
|
||||||||||||||||||
1 1 |
|
1 2t |
|
t 5c |
|
1 10 |
|
|
|
9 |
|
9 |
рад/с; модуль |
1 1 |
|
2 |
|
|
2 |
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
Д |
|
||||||||
рад/с2. |
|
|
|
А |
|
|
|
|
|
|
|||||||||
Дуговые |
|
стрелки для 1 и 1 , |
соответствующие |
направлению и |
|||||||||||||||
характеру вращения диска 1, следует направить в сторону движения часовой стрелки, т. к. алгебраические угловая скорость и угловое
ускорение оказались отрицательными (см. рис. 2). Тогда диски 2 и 3
будут вращаться против движения часовой стрелки за счёт зубчатой передачи.
Запишем уравнения связи. Для этого, согласно выражению (1), свяжем перемещение точек соприкосновения дисков 1 и 2, а также диска 3
и тела 4 (через нерастяжимый трос): |
|
|
|
|
|
|
Иr1 r1r2 |
|||||||||||||||||
s 1r1 |
2 R2 ; s4 |
2r2 , |
|
|
|
|
|
|
|
|||||||||||||||
получаем |
2 |
|
|
|
|
1 ; |
s4 |
R2 |
1 . |
|||||||||||||||
|
|
|
||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
R2 |
|
|
|
|||
Дифференцируем правые и левые части полученного равенства: |
||||||||||||||||||||||||
|
|
|
|
|
r |
0,2 |
9 4,5 |
|
|
|
|
|
|
|
r1 |
|
0,2 |
2 |
1 |
2 |
||||
|
|
|
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
рад/с; |
2 |
2 |
|
|
|
|
рад/с ; |
|||||||||||
2 |
|
2 |
|
|
R |
1 0,4 |
|
|
|
|
|
R2 |
1 |
0,4 |
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
54
V4 s4 |
|
r1r2 |
1 |
0,2 0,3 |
9 =1,35 м/с; a4 |
s4 |
|
r1r2 |
1 |
|
0,2 0,3 |
2 |
2 |
|
|
|
|
=0,3 м/с . |
|||||||||
|
|
R2 |
|
0,4 |
|
|
|
R2 |
|
|
0,4 |
|
|
|
|
|
|
|
|
|
|
|
|
Вычислим ускорение точки А на диске (см. рис. 2,б):
an |
= 2 R |
2 |
4,52 |
0,4 8,1 |
м/с2; |
a = |
2 |
R |
1 0,4 0,4 м/с2; |
|
A |
2 |
|
|
|
A |
|
|
2 |
||
С |
(aAn )2 |
8,12 0,42 |
|
|
|
65,77 8,1 м/с2. |
||||
|
aA |
|
(aA )2 |
|
|
|||||
|
|
|
5.1.3. К нематика ременной передачи |
|||||||
и |
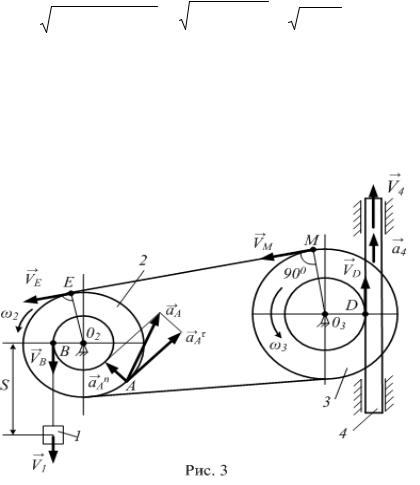
согласно уравнению s 3t3 15, где s – |
|||||||||
Груз 1 (р с. 3), опускаясь, |
||||||||||
расстоян |
е груза от места схода нити с поверхности вала в сантиметрах; t – |
|||||||||
время в секундах, пр вод т в движение колесо 2 и ременную передачу. |
||||||||||
|
б |
|
|
|
|
|
||||
|
|
А |
|
|||||||
Пренебрегая скольжением ремняДпо ободам колёс, определить для |
||||||||||
момента времени t1=1 с скорость и ускорение рейки 4, угловые скорости и |
||||||||||
ускорения колёс 2, 3 и ускорение точки А, если r2=30 см; R2=50 |
см – |
|||||||||
радиусы ступеней колеса 2; r3=40 см; R3=60 см – радиусы ступеней колеса |
||||||||||
3. |
|
15; r |
=30 см; R =50 см; r |
=40 см; |
R =60 см. |
|
||||
Дано: s 3t3 |
|
|||||||||
|
|
2 |
|
2 |
3 |
И3 |
||||
Определить: V4, a4, 2 , |
3 , 2 , 3 , aА |
при t1=1 с. |
|
|
||||||
1. Найдём 2 , 3 . Зная |
уравнение движения груза 1, определим его |
|||||||||
скорость |
как |
функцию |
времени V1 |
s 9t |
2 |
. |
Груз подвешен |
на |
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
нерастяжимом канате, поэтому скорость груза 1 такая же, как скорости точек на ободе колеса 2 радиуса r2 , т.е. VВ V1 9t 2 .
55
Найдём 2 как функцию времени: |
|
2 |
|
|
|
|
|
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
2 |
V |
B |
|
9t |
0,3t2 . |
|
|
(а) |
||||||||||
|
|
|
|
|
|
|
|
|
|
|
30 |
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
r2 |
|
|
|
|
|
|
|
|
|
|
|
|
||||
Так как колёса 2 и 3 связаны ремённой передачей (ремень |
||||||||||||||||||||||||||||
нерастяжим), то VE VM , но VE 2 |
R2 ; |
|
|
VM 3R3 . |
|
|
||||||||||||||||||||||
поэтому |
|
|
|
|
|
|
|
|
|
2 R2 |
3R3 , |
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
0,3t 2 |
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
R |
|
|
50 |
0,25t |
2 . |
|
(б) |
||||||||||
|
|
|
|
|
|
|
|
|
2 2 |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
3 |
|
R3 |
|
|
|
|
|
60 |
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
; |
|
|
|
|
|
0,5t . |
|
|
|
|||||
При 0,6t |
|
|
|
|
|
|
|
|||||||||||||||||||||
|
t1=1 c |
з |
(а) (б) найдём |
|
2 |
|
0,3 |
рад/c; |
3 0,25 рад/c. |
|
||||||||||||||||||
С2. Определ м V4 . Так как |
|
|
V4 VD 3r3 , то |
при t1 1c |
имеем |
|||||||||||||||||||||||
V4 10 |
см/с . |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
б |
|
|
|
|
|
|
|
||||||||||||||||||
3. |
Найдём |
2 , |
3 . Продифференцируем по времени выражения (а), |
|||||||||||||||||||||||||
(б): |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
При t |
|
|
|
|
|
|
2 |
|
|
2 |
|
|
|
|
|
|
3 |
|
|
|
|
|
3 |
|
|
|
|
|
|
1 с |
2 |
0,6 рад/c 2 ; |
|
3 |
|
0,5 рад/c 2 . |
|
|
|
||||||||||||||||||
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
4. Найдём |
а4. Рейка |
4 движется поступательно, поэтому все её точки |
||||||||||||||||||||||||||
имеют одинаковые ускорения. Точка D одновременно принадлежит рейке |
||||||||||||||||||||||||||||
4 и ободу колеса 3 радиуса r3 , |
поэтому a |
4 |
a |
r ; |
при t1=1 c |
а4=20 |
||||||||||||||||||||||
см/с2. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
D |
3 3 |
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
aA aA aAn |
|
|
5. Найдём ускорение точки |
, используя формулу |
, |
||||||||||||||||||||||||||
где a |
|
2 |
R |
2 |
; |
an |
2 R . |
|
|
|
|
Д |
|
|||||||||||||||
A |
|
|
|
A |
А2 2 |
|
|
|||||||||||||||||||||
При t1=1 c |
|
aA 30 |
|
c м /c2 ; aAn 4,5 |
|
см/с2 ; |
|
|
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
aA |
|
(a |
)2 |
(an )2 |
30,34 см/с2 . |
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
A |
|
|
|
|
A |
|
|
|
|
|
|
|
|
|
|
|
|
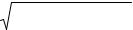
5.2. Пример выполнения расчетно-графическойИ(контрольной)
работы «Определение скоростей и ускорений точек твердого тела при поступательном и вращательном движениях»
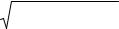
Дано: схема плоского механизма (рис. 4); уравнение движения груза 1:
Х = 2·t2 + 2, см; радиусы колес: R2 = 50 см; r2 = 30 см; R3 = 60 см; r3 = 40
см.
Определить: кинематические характеристики точки М тела 3 в момент
времени t1 = 1 c (VM(t1) = ?; aМn (t1) = ?; aМ (t1) = ? aМ (t1) = ?).
Решение. В начальный момент времени при t0 = 0 координата X(t0) = 2·(t0)2 + 2 = 2·02 + 2 = 2 см.
56
С |
|
течениемвремениувел ч вается. |
Рис. 4 |
Д фференц рован ем по времени уравнения движения груза 1
найдем проекц ю ХС1 скорости его центра масс на ось ОХ: |
||||||||
|
б |
|
|
|||||
|
|
ХС1 |
= |
Х |
= dX/dt |
= d(2t2 + 2)/dt = 4·t. |
||
Так как Х |
= 4·t > 0, то |
Х |
= V и, следовательно, координата Х = f(t) с |
|||||
Для граф ческого |
построения |
определяемых |
кинематических |
|||||
характеристик |
А |
момент времени t |
||||||
изо разим |
механизм в |
произвольный |
||||||
(рис. 5). |
|
|
|
|
|
|
|
|
|
|
|
|
|
Д |
|||
|
|
|
|
|
Рис. 5 |
И |
||
|
|
|
|
|
|
|
||
Так как груз 1 и участок АВ нити совершают поступательные движения, то справедливо равенство VB = V.
Точка В принадлежит телу 2, совершающему вращательное движение в системе отсчёта C2X2Y2Z2, поэтому модуль скорости этой точки определится из формулы
VB = ω2·BC2 = ω2·r2 = 2 ·r2,
где ω2 – модуль угловой скорости 2 тела 2.
57
Согласно рис. 5 вращение тела 2 происходит против хода часовой стрелки. Определим модуль ω2 угловой скорости 2 тела 2 по формуле
ω2 = VB/r2 = V/r2.
По известному модулю ω2 угловой скорости тела 2 определяется
модуль VC скорости точки С тела 2: |
|
|
|
С |
|
|
|
VC = ω2·CC2 = ω2·R2 |
= (V/r2)·R2 |
= V·(R2/r2). |
|
Так как участок нити CD совершает поступательное движение, то |
|||
справедливо равенство |
VC = VD = V·(R2/r2). |
|
|
другой стороны, точка D принадлежит колесу 3. Исходя из условия |
||||||
скорости |
|
|
||||
принадлежности этой точки телу 3, имеем |
||||||
|
|
|
VD = ω3·R3 = V·(R2/r2), |
|||
где ω3 – модуль угловой |
|
3 тела 3. |
||||
|
|
|
|
|
|
|
Тело 3 осуществляет вращение в направлении хода часовой стрелки с |
||||||
|
б |
|||||
угловая скоростью, выч сляемой по формуле |
||||||
|
|
|
3 = |
|
|
|
|
|
|
Х ·(R2/(r2·R3)) = (4·t)·(R2/(r2·R3)). |
|||
По |
звестной |
|
|
|
3 тела 3, находят его угловое |
|
угловой скорости |
||||||
ускорен |
е 3 |
|
|
|
|
|
: 3 = d 3 /dt = 4·(R2/(r2·R3)) = const > 0. |
||||||
|
|
|
|
|
|
|
Так как |
3 > |
А |
||||
0 и 3 |
= const > 0, то происходит равноускоренное |
|||||
|
|
|
|
|
|
|
вращение тела 3.
Определяем кинематические характеристики точки М тела 3 в момент
времени (t1). Модуль угловой скорости равен |
|
|
|
|
|
|
|
||||||||||
|
|
ω3 |
= 3 = (4·t1)·(R2/(r2·R3)). |
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Модуль углового ускорения |
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
ε3 |
= 3 = 4·(R2/(r2·R3)). |
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Модуль скорости точки М равна |
|
|
|
|
|
|
|
|
||||||||
|
|
VM = ω3·MC3 = ω3·r3 = (4·t1)·(R2·r3/(r2·R3)). |
|
|
|||||||||||||
|
Модуль центростремительного ускорения точки М |
|
|
|
|
||||||||||||
|
|
n |
2 |
|
|
|
2 |
|
|
|
|
|
2 |
|
|
|
|
|
|
aМ = ω3 |
·MC3 = ωД3 ·r3 = (4·t1·(R2/(r2·R3))) ·r3. |
||||||||||||||
|
Модуль вращательного ускорения равен |
|
|
|
|
|
|
|
|||||||||
|
|
|
aМ |
= ε3·r3 = 4·(R2·r3/(r2·R3)). |
|
|
|
|
|||||||||
|
Модуль полного ускорения точки М: |
a |
М |
|
(an )2 |
(a |
)2 . |
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
М |
М |
|
|
||
|
Произведём вычисления для момента времениИt1 = 1 c и полученные |
||||||||||||||||
значения сведём в таблицу. |
|
|
|
|
|
|
|
|
|
|
|
|
Таблица 5.1 |
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
ω3(t1), |
ε3(t1), |
|
|
|
|
VM(t1), |
|
aМn (t1), |
aМ (t1), |
|
aМ (t1), |
|
||||
|
рад/с |
рад/с2 |
|
|
|
|
см/с |
|
см/с2 |
|
см/с2 |
|
см/с2 |
|
|||
|
1,111 |
1,111 |
|
|
|
|
44,444 |
|
49,382 |
44,444 |
|
66,434 |
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
58
5.3. Варианты расчетно-графической (контрольной) работы «Определение скоростей и ускорений точек твердого тела при поступательном и вращательном движениях»
По условию этого задания требуется определить скорость и ускорение
|
точки М одного из колёс механизма в момент времени t1 |
|
|
|
||||||
|
|
|
(VM(t1) = ?; an |
(t1) = ?; a |
(t1) = ? a (t1) = ?). |
|||||
|
|
|
М |
М |
|
М |
|
|
|
|
|
|
хемы механ змов показаны на рисунках, а необходимые данные |
||||||||
|
приведены в табл. 5.2. |
|
|
|
|
|
Таблица 5.2 |
|||
|
вариан |
|
|
|
|
|||||
|
|
|
|
|
|
|
||||
С |
|
|
|
|
|
|
|
|||
|
Номер |
Расчётная схема механизма |
|
Исходные данные |
|
|||||
|
|
|
|
|
||||||
|
та |
|
|
для расчёта |
|
|||||
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
||
|
|
|
б |
|
|
|
|
|
||
|
1 |
|
|
2 |
|
|
|
|
3 |
|
|
|
|
А |
Х = 15·t2·+ 12·t + 2, см; |
|
|||||
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
R2 = 60 см; |
|
|
|
1 |
|
|
|
|
|
|
r2 = 45 см; |
|
|
|
|
|
|
|
|
|
R3 = 36 см; |
|
||
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
t1 = 2 c |
|
|
|
|
|
Д2 |
|
|||||
|
|
|
|
|
|
И |
|
|||
|
|
|
|
|
|
|
Х = 4·t |
·+ 10·t + 5, см; |
|
|
|
|
|
|
|
|
|
|
R2 = 80 см; |
|
|
|
|
|
|
|
|
|
|
R3 = 60 см; |
|
|
|
2 |
|
|
|
|
|
|
r3 = 45 см; |
|
|
|
|
|
|
|
|
|
|
|
t1 = 1 c |
|
|
|
|
|
|
|
|
|
|
|
|
59

|
|
Продолжение табл. 5.2 |
|
|
|
|
|
1 |
2 |
3 |
|
С |
|
Х = 0,5 t2 + 6·t + 8, см; |
||||
|
|
|
|
|||
|
|
|
|
|
R2 = 100 см; |
|
3 |
|
|
|
r2 = 60 см; |
||
|
|
|
R3 = 75 см; |
|||
|
и |
|
||||
|
|
t1 = 2 c |
||||
|
|
|
|
|
||
|
|
б |
|
|
|
|
|
|
|
А |
|
|
|
|
|
|
|
Х = 9,5·t2·+ 4·t + 4, см; |
||
|
|
|
|
|
R2 = 58 см; |
|
4 |
|
|
|
r2 = 45 см; |
||
|
|
|
R3 = 40 см; |
|||
|
|
|
Д |
|||
|
|
|
|
|
t1 = 3 c |
|
|
|
|
|
Х = 6·t2 + 15·t + 3, см; |
||
|
|
|
|
|
R2 = 45 см; |
|
5 |
|
|
Иr2 = 30 см; |
|||
|
|
|
|
|
R3 = 80 см; |
|
|
|
|
|
|
t1 = 2 c |
|
60