

2192
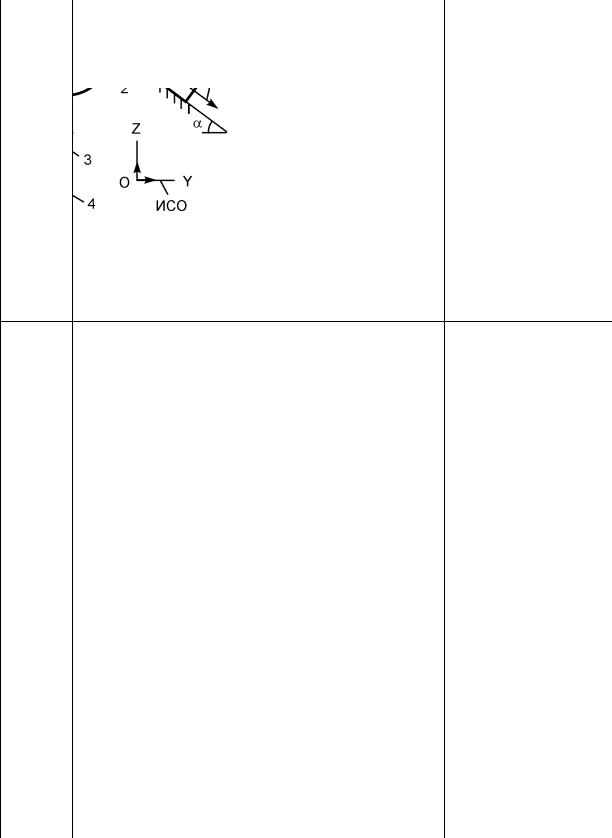
.pdfВарианты 26 – 30 (рис. 7)
С |
|
и |
Рис. 7 |
|
|
Имея в точке А скорость |
VA, тело движется по горизонтальному |
б |
|
участку АВ длиной l в течение τ секунд. Коэффициент трения скольжения |
|
по плоскости равен f. Со скоростью VB тело в точке В покидает плоскость и попадает в точку С со скоростью VC, находясь в воздухе Т секунд.
|
При решении задачи принять тело за материальную точку; |
|
А |
сопротивление воздуха не учитывать. |
|
и d. |
Вариант 26. Дано: VA = 7 м/с; f = 0,2; l = 8 м; h = 20 м. Определить VC |
|
|
|
Вариант 27. Дано: VA = 4 м/с; f = 0,1; τ = 2 c; d = 2 м. Определить VB и |
h. |
Д |
|
И |
Вариант 28. Дано: VB = 3 м/с; f = 0,3; l = 3 м; h = 5 м. Определить VA и
Т.
Вариант 29. Дано: VA = 3 м/с; VB = 1 м/с; l = 2,5 м; h = 20 м.
Определить f и d.
Вариант 30. Дано: f = 0,25; l = 4 м; d = 3 м; h = 5 м. Определить VA и τ.
91
8. ОБЩИЕ ТЕОРЕМЫ ДИНАМИКИ МЕХАНИЧЕСКОЙ СИСТЕМЫ. РАСЧЕТНО-ГРАФИЧЕСКАЯ (КОНТРОЛЬНАЯ) РАБОТА
ПРИМЕНЕНИЕ ТЕОРЕМЫ ОБ ИЗМЕНЕНИИ КИНЕТИЧЕСКОЙ ЭНЕРГИИ К ИЗУЧЕНИЮ ДВИЖЕНИЯ МЕХАНИЧЕСКОЙ СИСТЕМЫ
С |
|
|
|
|
|
|
|
||
8.1. Методические рекомендации к выполнению расчетно- |
|||||||||
|
|
графической (контрольной) работы |
|
|
|||||
Д фференц альная форма теоремы об изменении кинетической |
|||||||||
другими |
используется |
для |
составления |
||||||
энергии |
механ ческой |
системы |
|||||||
дифференц ального уравнения движения систем с одной степенью |
|||||||||
свободы , в частности, для нахождения ускорения движущихся тел. Эта |
|||||||||
форма может также |
спользоваться для составления дифференциальных |
||||||||
уравнен й дв жен я с стем с несколькими степенями свободы совместно |
|||||||||
с |
об |
|
|
|
|
||||
общ ми теоремами динамики. |
|
|
|
|
|||||
Конечная |
форма |
теоремы |
изменении |
кинетической |
энергии |
||||
механической |
с стемы |
позволяет получить |
первый |
интеграл |
|||||
дифференц альных уравнений движения в тех |
случаях, |
когда можно |
|||||||
вычислить сумму ра отАвнешних сил на конечном перемещении системы без знания закона её движения.
Теорема об изменении кинетической энергии в случаях, когда движущаяся механическая система является неизменяемой, позволяет исключить из рассмотрения все неизвестные внутренние силы, а при
1.Убедиться в том, что системаДимеет одну степень свободы.
2.Выбрать координату, относительно которойИбудет составляться уравнение движения.
3.Записать теорему об изменении кинетической энергии в дифференциальной форме.
4.Вычислить кинетические энергии отдельных тел системы. Кинетическую энергию системы вычислить как сумму кинетических энергий отдельных тел.
5.Угловые скорости тел системы и линейные скорости их центров масс выразить через заданную скорость. В результате кинетическая энергия механической системы также будет представлена как функция этого независимого параметра.
6.Вычислить производную по времени от кинетической энергии системы.
92
7. Изобразить на расчётной схеме все внешние силы, действующие на механическую систему. Вычислить сумму мощностей внешних сил.
8. Составить дифференциальное уравнение движения, использовав для этого теорему об изменении кинетической энергии в дифференциальной форме.
9. Задать начальные условия движения механической системы. |
||
С |
||
10. |
Найти общее решение дифференциального уравнения движения. |
|
11. |
Определить по начальным условиям постоянные интегрирования. |
|
12. |
Подстав ть значения постоянных интегрирования в общее |
|
решен е |
д фференц ального уравнения, найти закон движения |
|
Найти |
||
механической с стемы. |
||
Теорема об зменен и кинетической энергии механической системы в |
||
конечной ( |
нтегральной форме) применяется, например, к решению задач |
|
в следующей постановке: механическая система, находящаяся в покое, под действ ем внешн х с л приходит в движение. За некоторое время одно из тел системыбперемещается на заданное расстояние.
скорости, пр о ретённые телами системы. Порядок решен я данной задачи следующий:
1.Убед ться в том, что механическая система имеет одну степень свободы.
2.Выбрать координату, с помощью которой будет определяться положение системы.
3.Записать теорему об изменении кинетической энергии механической системы в конечной форме, положив значение кинетической энергии механической системы в начальный момент времени равным нулю.
4.Изобразить на рисунке систему в начальном и конечном положениях. Вычислить кинетическую энергию системы в конечном положении как сумму кинетических энергий тел, входящих в её состав. На расчётной схеме показать все кинематические характеристики, от которых зависит кинетическая энергия системы.
5.Выразить кинетическую энергию системы через скорость тела, перемещение которого задано.
6.Изобразить на расчётной схеме все внешние и внутренние силы системы (в случае неизменяемой механической системы — только внешние силы).
7.Вычислить сумму работ сил, приложенных к системе, на заданном её перемещении.
Перемещения точек приложения сил и углы поворота тел, к которым приложены моменты, выразить через перемещение тела которого задано.И
93
8. Из теоремы об изменении кинетической энергии в конечной форме определить искомую скорость, приравняв полученные в пунктах 5, 6 выражения кинетической энергии системы и суммы работ сил.
8.2. Пример выполнения расчетно-графической (контрольной) |
||||||||
работы «Применение теоремы об изменении кинетической энергии |
||||||||
С |
|
|
|
|
||||
|
к расчету движения механической системы» |
|||||||
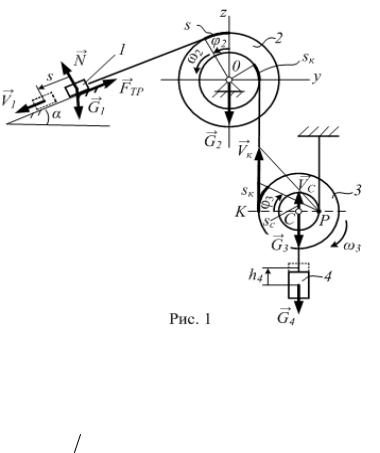
Механ ческая с стема под действием сил тяжести приходит в |
||||||||
движен е |
з состоян я покоя, начальное положение системы показано на |
|||||||
. 1. |
|
|
|
|
|
|
|
|
рис |
|
|
|
|
||||
|
б |
|
|
|||||
|
|
А |
||||||
|
|
|
|
Д |
||||
Учитывая трение скольжения тела 1, пренебрегая другими силами |
||||||||
сопротивления и массами нерастяжимых нитей, определить скорость тела |
||||||||
|
|
|
|
|
|
|
И |
|
1 в тот момент, когда пройденный им путь будет равен s. |
||||||||
Дано: m1 m ; |
m2 m 3; m3 |
2 |
m ; |
m4 |
4 m ; |
R2 26 см; r2 0,5R2 ; |
||
|
|
10 |
|
|
3 |
|
|
|
R3 20 см; r3 |
0,5R3 ; i2x 20 см и |
i3x |
18 см – радиусы инерции тел; |
|||||
300 ; f |
0,1; s 2 м. |
|
|
|
|
|||
Определить: Скорость первого тела V1.
Решение.
Применим теорему об изменении кинетической энергии механической системы
n |
n |
T T0 Aie Aii . |
|
i 1 |
i 1 |
94
В начальном положении система находится в покое, поэтому Т0=0 и
n
Aii 0 , так как система состоит из твердых тел, соединенных
i 1
нерастяжимыми нитями.
n
ледовательно, теорема принимает вид T Aie .
i 1
Для определения кинетической энергии Т и суммы работ внешних сил
изобраз м с стему в конечном положении, определяемом перемещением s |
||
груза 1, углами поворота шкивов φ2 , φ3 и перемещениями sС , h4 (см. рис.1). |
||
скорости |
скоростями |
и |
Зап шем к немат ческие соотношения между |
||
Сперемещен ями точек системы, то есть уравнения связей, при этом |
||
перемещен я выразим соответственно через |
скорость V1 |
и |
перемещен е s груза 1. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
работ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
Эти соотношен я запишем в форме таблицу для расчета кинетических |
|||||||||||||||||||||||||||||||||||
энергий Т |
|
|
А согласно кинематической схеме. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Таблица 8.1 |
|||||||||||||||||
|
|
|
|
|
|
|
|
Та лица результатов расчета |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
А2 |
|
2 |
|
|
|
|
|
|
|
|
||||||||||||||||||||
|
|
|
T f (V12 ) |
|
|
|
|
A f |
(s) |
|
|
|
|
|
|
||||||||||||||||||||
|
|
|
|
2 |
|
V1 |
|
|
|
|
|
|
|
2 |
|
s |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
R2 |
|
|
|
|
|
|
|
|
R |
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
Д |
|
|||||||||||||||||||||||
|
|
V |
r |
V1 r2 V1 |
|
s |
к |
|
2 |
|
r |
|
|
s |
r2 |
|
|
s |
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||
|
|
к |
2 2 |
|
R |
2 |
|
|
|
|
2 |
|
|
|
|
|
R |
2 |
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
Vk |
|
|
|
V1 |
|
|
|
|
|
sk |
|
|
|
|
|
|
s |
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
|
|
|
3 |
R3 r3 |
|
6r3 |
|
|
|
3 |
|
|
R3 r3 |
|
|
|
|
6r3 |
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||
|
|
|
V r V1 |
|
|
|
s |
r |
|
|
s |
|
|
||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||
|
|
|
C |
|
3 |
3 |
|
|
|
|
|
|
|
И |
|||||||||||||||||||||
|
|
|
|
|
|
|
|
6 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
6 |
|
|
|
|
|
||||||
|
|
|
V |
V |
V1 |
|
|
|
h |
s |
|
|
|
|
s |
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
4 |
|
С |
|
|
6 |
|
|
|
|
|
|
4 |
|
|
C |
|
|
|
|
6 |
|
|
|
|
|
|
|
|
||||
|
Кинематическое передаточное число системы i |
|
|
|
s |
|
V1 6 |
||||||||||||||||||||||||||||
|
|
|
h |
||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
V |
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
4 |
|
4 |
|
|||||||
В таблице 8.1 все скорости выражены через искомую скорость V1, а все перемещения – через известную величину s – перемещение груза 1.
Скорость будем подставлять в формулы кинетических энергий, а перемещения – в формулы работ внешних сил.
Вычислим кинетическую энергию системы в конечном положении как сумму кинетических энергий тел 1, 2, 3, 4.
95

T T1 T2 T3 T4 .
Кинетическая энергия груза 1, движущегося поступательно:
T1 m12V12 .
Кинетическая энергия шкива 2, вращающегося вокруг оси Оx:
|
|
|
|
|
|
|
|
|
|
|
J |
2 |
2 |
|
|
m |
|
i2 |
V 2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
T |
|
|
|
|
2 |
|
|
|
|
|
2 |
|
2x |
1 |
. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
2 R |
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
К нет ческая энерг я шкива 3, совершающего плоское движение: |
||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
m V 2 |
|
|
|
|
J |
|
|
2 |
|
|
m V |
2 |
m i2 V |
2 |
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
T |
|
3 C |
|
|
|
3 3 |
|
|
|
|
3 1 |
3 3x |
|
|
1 |
. |
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||
|
|
|
3 |
|
|
2 |
|
|
|
|
|
|
|
2 |
|
|
2 36 |
|
2 36r |
2 |
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
С |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
К нет ческая энерг я груза 4, связанного с движущимся центром С |
||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
m V 2 |
|
|
m |
4 |
|
V 2 |
||||
|
3 совершающего поступательное движение: T |
|
|
|
|
|
4 4 |
|
|
|
|
1 |
. |
|||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||
шкива |
|
|
|
|
|
|
|
|
|
|
|
|
4 |
|
|
|
|
2 |
|
|
|
2 36 |
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||
К нет ческую энерг ю всей механической системы запишем в общем |
||||||||||||||||||||||||||||||||||||||||||
виде, |
выраз |
в |
все |
скорости |
|
|
через |
V |
2 , |
все |
массы через |
m, |
|
полученное |
||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
2 . |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
постоянное число о означим K1: |
|
T K |
1 |
m V |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
б |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||
Для расчета суммы ра от покажем все силы: G1 , G2 , G3 , G4 , FTP , N . |
||||||||||||||||||||||||||||||||||||||||||
Реакция поверхности |
N перпендикулярна перемещению s и работу не |
|||||||||||||||||||||||||||||||||||||||||
совершает. Сила G2 |
|
приложена к неподвижной точке О и работу также не |
||||||||||||||||||||||||||||||||||||||||
совершает. |
|
e |
|
|
А |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||
Тогда |
|
Ai |
|
AG1 AF |
|
|
|
AG3 |
|
|
AG4 ; |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
ТР |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
AF |
FTP s N f s m1g cos f s, |
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||
|
|
|
ТР |
|
|
|
s |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
s |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
где |
AG3 G3 |
hC m3 g |
|
; |
|
|
|
AG4 |
|
G4 h4 |
m4 g |
. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
6 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
6 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
Запишем |
Ae |
|
|
в общем |
|
|
Д |
m, и |
||||||||||||||||||||||||||||||||||
|
|
|
виде, |
|
|
выразив |
все |
|
массы |
через |
|
|||||||||||||||||||||||||||||||
|
|
|
i |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
полученное постоянное число обозначим K2: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
Ae |
K |
2 |
|
m. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
i |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Приравняем, по |
теореме |
об |
|
изменении |
кинетической |
|
энергии |
|||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
И |
|||||||||||||||||
системы: |
T Ae |
|
или |
|
K |
|
mV 2 |
K |
2 |
m , |
откуда V |
|
|
|
|
|
K2 |
. |
|
|
|
|
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||
|
|
|
i |
|
|
|
|
|
|
1 |
|
|
1 |
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
K1 |
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
96
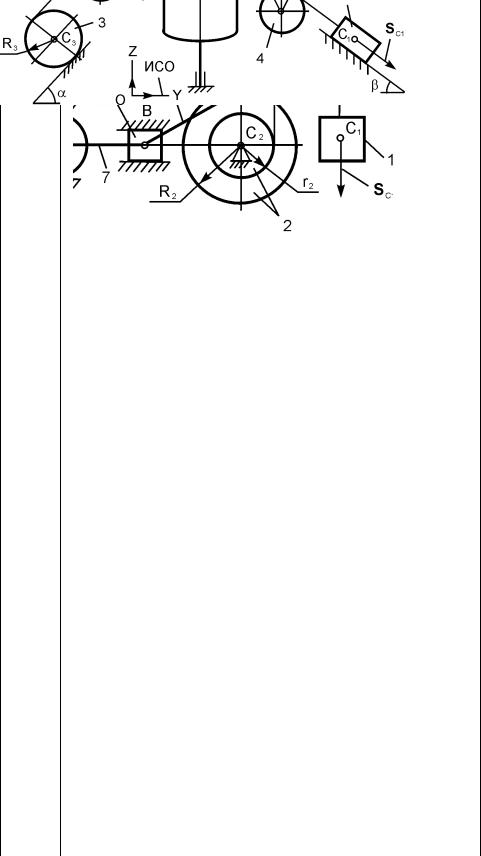
8.3. Варианты расчетно-графической (контрольной) работы «Применение теоремы об изменении кинетической энергии к расчету движения механической системы»
Механическая система под действием сил тяжести приходит в движение из состояния покоя; начальное положение системы показано в табл. 8.2. Учитывая трение скольжения тела 1 (варианты 1 – 3, 5, 6, 8 –1 2, 17 – 23, 29, 30) и пренебрегая другими силами сопротивления и массами нитей, предполагаемых нерастяжимыми, определить скорость центра масс
1 тела 1 в тот момент времени, когда пройденный им путь станет равным
S 1. |
|
пр няты следующие обозначения: m1, m2, m3, m4 – массы |
|||
В задан |
|
||||
С |
|
|
|
||
тел 1, 2, 3, 4; R2, r2, R3, r3 – радиусы больших и малых окружностей; iС2X2, |
|||||
i 3X3, i 4X4 – |
рад усы нерции ступенчатых колёс 2. 3 и 4 относительно |
||||
горизонтальных осей, проходящих через их центры масс; α, β – углы |
|||||
наклона плоскостей к гор зонту; f – коэффициент трения скольжения. |
|||||
Расчётные схемы |
|
и необходимые для решения данные |
|||
механизмов |
|
|
|||
приведены в |
|
. 8.2. Блоки и катки, для которых радиусы инерции в |
|||
таблице не указаны, сч тать сплошными однородными дисками. |
|||||
Наклонные участки нитей параллельны соответствующим наклонным |
|||||
плоскостям. |
|
|
|
|
|
табл |
|
||||
Примечания к вариантам. |
|
|
|
||
Вариант |
4 – массами звеньев |
|
В, ВС3 и ползуна В пренебречь. |
||
Вариант |
5 – массой водила 5 пренебречь. |
|
|||
Вариант |
14 |
А |
|||
– массы каждого из четырёх колес одинаковы. |
|||||
Вариант |
16 |
– массой водила 5 пренебречь. |
|
||
Вариант 17 – шатун 3 рассматривать как тонкий однородный |
|||||
стержень. |
|
|
Д |
||
Вариант |
18 |
|
|||
– массой водила 4 пренебречь. |
|
||||
Вариант |
20 |
– массами звеньев АВ, ВС3 и ползуна В пренебречь. |
|||
Вариант |
22 |
– массой водила 4 пренебречь. |
|
||
Вариант |
24 |
– массами звеньев АВ, ВС3 и ползуна В пренебречь. |
|||
Вариант |
25 |
– массой водила пренебречь. |
И |
||
|
|||||
Вариант 26 – массы и моменты инерции колёс 2 и 5 одинаковы. Шатун 3 рассматривать как тонкий однородный стержень.
Вариант 28 – шатун 3 рассматривать как тонкий однородный стержень.
97
|
|
|
|
Таблица 8.2 |
|||
|
|
|
|
|
|||
|
Номер |
Расчётная схема механизма |
Исходные данные |
||||
|
вариан |
|
|
|
|
|
|
|
та |
|
|
|
|
|
|
|
1 |
|
2 |
3 |
|
|
|
|
и |
m1 = m кг; |
|
||||
|
m2 = 4·m кг; |
|
|||||
|
m3 = m/5 кг; |
|
|||||
|
1 |
|
|
|
|||
|
|
|
m4 = 4·m/3 кг; |
|
|||
С |
|
|
|||||
|
α = 60о; |
|
|||||
|
|
б |
f = 0,1; |
|
|||
|
|
SС1 = 2 м |
|
||||
|
|
m1 = m кг; |
|
||||
|
|
|
|
m2 = m/2 кг; |
|
||
|
|
|
|
m3 = m/3 кг; |
|
||
|
|
|
|
R3 = 30 см; |
|
||
2 |
|
|
r3 = (2/3)·R3; |
|
|||
|
|
iC3X3 = 20 см; |
|
||||
|
|
|
|
|
|||
|
|
|
Д |
|
|
||
|
|
|
А |
α = 30о; |
|
||
|
|
|
β = 45о; |
|
|||
|
|
|
|
f = 0,22; |
|
||
|
|
|
|
SС1 = 2 м |
|
||
|
|
|
|
|
|||
|
|
|
И |
|
|||
|
|
|
|
m1 = m кг; |
|
||
|
|
|
|
m2 = m кг; |
|
||
|
|
|
|
m3 = m/10 кг; |
|
||
3 |
|
|
m4 = m кг; |
|
|||
|
|
|
|
α = 45 |
о |
; |
|
|
|
|
|
|
|
||
|
|
|
|
f = 0,10; |
|
||
|
|
|
|
SС1 = 2 м |
|
||
|
|
|
|
|
|
|
|
98
|
|
Продолжение табл. 8.2 |
||
|
|
|
|
|
1 |
2 |
3 |
|
|
|
|
|
m1 = m кг; |
|
|
|
|
m2 = 2·m кг; |
|
|
|
|
m3 = 40·m кг; |
|
|
|
и |
m4 = m кг; |
|
|
|
R2 = 20 см; |
|
|
|
4 |
AB = 5·R2; |
|
|
С |
R3 = 40 см; |
|
||
r2 = 0,5·R2; |
|
|||
|
|
|
R4 = r2; |
|
|
|
|
iC2X2 = 18 см; |
|
|
|
|
SС1 = 0,1·π м |
|
|
|
|
|
|
|
|
б |
m1 = m кг; |
|
|
|
m2 = 2·m кг; |
|
|
|
|
m3 = m кг; |
|
|
|
|
|
R3 = 20 см; |
|
5 |
|
R2 = 20 см; |
|
|
|
r2 = 0,8·R2; |
|
||
|
|
|
|
|
|
|
Д |
|
|
|
|
А |
iC2X2 = 18 см; |
|
|
|
α = 60о; |
|
|
|
|
|
f = 0,12; |
|
|
|
|
SС1 = 0,28·π м |
|
|
|
|
|
|
|
|
|
m1 = m кг; |
|
|
|
|
m2 = 3·m кг; |
|
|
|
|
m3 = m кг; |
|
6 |
ИR3 = 28 см; |
|
||
|
α = 30о; |
|
||
|
|
|
β = 45о; |
|
|
|
|
f = 0,10; |
|
|
|
|
SС1 = 1,5 м |
|
|
|
|
|
|
99

|
|
Продолжение табл. 8.2 |
|
|
|
1 |
2 |
3 |
С |
|
|
|
m1 = m кг; |
||||
|
|
|
|
|
|
m2 = 2·m кг; |
||
|
|
|
|
|
|
m3 = 2·m кг; |
||
7 |
|
|
|
|
R2 = 16 см; |
|||
|
|
|
|
r2 |
= (3/4)·R2; |
|||
|
и |
|
|
|||||
|
|
|
R3 = 25 см; |
|||||
|
|
б |
|
iC2X2 = 14 см; |
||||
|
|
|
|
α = 30о; |
||||
|
|
|
|
SС1 = 2 м |
||||
|
|
|
|
|
|
|||
|
|
|
А |
m1 = m кг; |
||||
|
|
|
|
|
|
m2 = m/2 кг; |
||
|
|
|
|
|
|
m3 = m/3 кг; |
||
8 |
|
|
|
|
R3 = 30 см; |
|||
|
|
|
|
|
α = 30о; |
|||
|
|
|
|
Д |
||||
|
|
|
|
|
|
|
β = 45о; |
|
|
|
|
|
|
|
|
f = 0,15; |
|
|
|
|
|
|
|
SС1 = 1,75 м |
||
|
|
|
|
|
И3 3 |
|
||
|
|
|
|
|
|
m1 = m кг; |
||
|
|
|
|
|
|
m2 = 2·m кг; |
||
|
|
|
|
|
|
m3 = 9·m кг; |
||
9 |
|
|
|
|
R3 = 30 см; |
|||
|
|
|
|
r |
= 0,5·R ; |
|||
|
|
|
|
|
|
iC3X3 = 20 см; |
||
|
|
|
|
|
|
|
α = 30о; |
|
|
|
|
|
|
|
|
f = 0,12; |
|
|
|
|
|
|
|
SС1 = 1,5 м |
||
100