

2192
.pdf
|
|
Продолжение табл. 9.1 |
|
|
|
1 |
2 |
3 |
С |
|
m1 = 80 кг; |
||
22 |
|
|
m2 = 20 кг; |
|
|
|
R2 = 0,10 м; |
||
|
и |
|
||
|
|
М = 120 Н·м |
||
|
|
|
||
|
|
А |
m1 = 10 кг; |
|
|
|
m2 = 25 кг; |
||
23 |
б b = 0,30 м; |
|||
|
|
|
|
с = 0,50 м; |
|
|
|
|
d = 0,35 м; |
|
|
|
|
= 10 рад/с |
|
|
|
|
|
|
|
|
Д |
|
|
|
|
|
m1 = 10 кг; |
|
|
|
|
m2 = 25 кг; |
|
|
|
|
b = 0,20 м; |
24 |
|
Ис = 0,50 м; |
||
|
|
|
|
d = 0,30 м; |
|
|
|
|
= 12 рад/с |
|
|
|
|
|
121

|
|
Продолжение табл. 9.1 |
|
|
|
1 |
2 |
3 |
С |
|
m1 = 10 кг; |
||
|
|
|
|
m2 = 25 кг; |
25 |
|
|
m3 = 20 кг; |
|
|
|
R3 = 0,30 м; |
||
|
и |
|
||
|
|
r3 = 0,20 м |
||
|
|
m1 = 80 кг; |
||
|
|
А |
m2 = 20 кг; |
|
|
|
m3 = 20 кг; |
||
|
|
б |
|
m4 = 20 кг; |
26 |
|
R3 = 0,30 м; |
||
|
|
r3 = 0,20 м; |
||
|
|
|
|
|
|
|
|
|
b = 0,20 м; |
|
|
|
|
c = 0,30 м |
|
|
Д |
||
|
|
|
И |
|
|
|
|
|
m1 = 50 кг; |
|
|
|
|
m2 = 20 кг; |
|
|
|
|
m3 = 20 кг; |
27 |
|
|
R3 = 0,25 м; |
|
|
|
|
|
r3 = 0,15 м; |
|
|
|
|
b = 0,20 м |
122
|
|
|
|
|
|
Окончание табл. 9.1 |
|||
|
|
|
|
|
|
|
|
|
|
1 |
|
|
2 |
|
|
|
3 |
|
|
С |
|
|
|
|
m1 = 30 кг; |
|
|||
|
|
|
|
m2 |
= 15 кг; |
|
|||
|
|
|
|
|
|
|
m3 = 15 кг; |
|
|
28 |
|
|
|
|
|
P = 300 H; |
|
||
|
|
|
|
|
R3 = 0,25 м; |
|
|||
|
и |
|
|
|
|
||||
|
|
|
|
r3 = 0,15 м |
|
||||
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
||
|
|
б |
|
|
|
|
|
||
|
|
|
А |
|
m1 |
= 10 кг; |
|
||
|
|
|
|
m2 |
= 25 кг; |
|
|||
|
|
|
|
|
|
|
m3 = 25 кг; |
|
|
29 |
|
|
|
|
|
b = 0,20 м; |
|
||
|
|
|
|
|
|
|
с = 0,15 м; |
|
|
|
|
|
|
|
|
|
d = 0,25 м; |
|
|
|
|
|
|
Д |
|
||||
|
|
|
|
|
|
|
= 8 рад/с |
|
|
|
|
|
|
|
|
|
|
|
|
30 |
|
|
|
И |
|
||||
|
|
|
|
|
|
|
m1 |
= 10 кг; |
|
|
|
|
|
|
|
|
m2 = 25 кг; |
|
|
|
|
|
|
|
|
|
m3 = 20 кг; |
|
|
|
|
|
|
|
|
|
m4 = 15 кг; |
|
|
|
|
|
|
|
|
|
b = 0,50 м; |
|
|
|
|
|
|
|
|
|
с = 0,35 м; |
|
|
|
|
|
|
|
|
|
d = 0,15 м |
|
|
|
|
|
|
|
|
|
= 16 рад/с |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
123
10. ЭЛЕМЕНТЫ АНАЛИТИЧЕСКОЙ МЕХАНИКИ. РАСЧЕТНО-ГРАФИЧЕСКАЯ (КОНТРОЛЬНАЯ) РАБОТА
ПРИМЕНЕНИЕ ПРИНЦИПА ВОЗМОЖНЫХ ПЕРЕМЕЩЕНИЙ К РЕШЕНИЮ ЗАДАЧ О РАВНОВЕСИИ СИЛ, ПРИЛОЖЕННЫХ К МЕХАНИЧЕСКОЙ СИСТЕМЕ С ОДНОЙ СТЕПЕНЬЮ СВОБОДЫ
10.1. Методические рекомендации к выполнению расчетнографической (контрольной) работы
Пр нц п возможных перемещений применяется при исследовании
равновес |
я твёрдых тел, систем твёрдых тел: для определения положений |
равновес |
я, для определения реакций связей, при определении |
С |
|
зависимостей между задаваемыми силами. |
|
Задачи на сследование равновесия твёрдых тел и систем твёрдых тел
рекомендуется выполнять в следующей последовательности:
б отбросив данную связьА, заменить её действие на механическую систему
1. |
Изобраз ть на |
сунке активные силы, приложенные к каждой из |
|
мат |
точек механической системы. |
|
|
ериальных |
добавить соответствующие |
||
2. |
При нал ч |
неидеальных связей |
|
реакции связей (с лы трения отнести к числу активных сил). |
|||
3. |
Если искомой |
величиной является |
реакция связи, то следует |
соответствующей реакцией.
Дальнейший ход решения задачи зависит от того, сколько степеней свободы имеет исследуемая механическая система.
В случае механической системы с одной степенью свободы:
1.Дать возможное перемещение одной из точек механической системы и выразить возможные перемещения точек приложения сил в зависимости от заданного возможного перемещения.
2.Вычислить сумму элементарных работ активных сил и реакций связей на возможных перемещениях точек приложения сил и приравнять её нулю.
3.Выразить возможные перемещения точек приложения сил через перемещение какой–либо одной точки и, подставив полученные соотношения в уравнение работ, определить искомую величину.
Для механической системы с несколькими степенями свободы:
4.Выбрать независимые возможные перемещения точек механической системы в числе, равном числу степеней свободы этой системы.
5.Сообщить возможное перемещение, соответствующее одной из степеней свободы механической системы, считая при этом возможные
перемещения, соответствующие остальным степеням свободы, равными нулю. Составить уравнение работ, выражающее принцип возможныхДИ
124
перемещений, для каждого независимого перемещения. Используя связи между возможными перемещениями точек приложения сил на каждом независимом перемещении, преобразовать полученные уравнения работ (как в случае механической системы с одной степенью свободы).
Аналитический метод позволяет формализовать процесс решения задачи. Он заключается в определении работ задаваемых сил на возможном перемещении системы через проекции сил и проекции возможных перемещений на декартовы оси координат:
|
|
|
|
|
n |
|
Fky yk Fkz zk 0 , |
|
(1) |
|||
|
|
|
|
|
Fkx xk |
|
||||||
|
Fkx , |
|
Fky , |
Fkz – |
k 1 |
|
k-й |
|
δxk , |
δyk , |
δzk – |
|
здесь |
|
проекции |
силы; |
проекции |
||||||||
С |
|
точки приложения этой силы на оси. |
||||||||||
|
||||||||||||
возможного перемещен я sk |
||||||||||||
Проекц |
|
возможных |
перемещений |
вычисляют |
путем записи |
|||||||
уравнен й коорд нат для точек приложения сил и применения к этим |
||||||||||||
уравнен ям |
|
операц |
|
варьирования |
(аналогичной |
операции |
||||||
|
|
|
рован я функции). |
|
|
|
|
|
|
|||
дифференц |
|
|
|
|
|
|
||||||
План решен я задачи. |
|
|
|
|
|
|
|
|||||
1. |
Показать все задаваемые силы и моменты действующих пар сил. |
|||||||||||
2. |
Выбрать неподвижную систему декартовых координат, связав ее с |
|||||||||||
телом, которое |
при |
возможном |
перемещении |
системы |
остается |
|||||||
|
|
б |
|
|
|
|
||||||
неподвижным. |
|
|
|
|
|
|
|
|
|
|||
3. |
Вычислить проекции заданных сил на оси Fkx , Fky , Fkz . |
|
||||||||||
4. |
Записать уравнения координат точек приложения сил xk, yk, zk. |
|||||||||||
5. |
Найти значения δxk , |
δyk |
, δzk |
дифференцированием уравнений |
||||||||
|
|
|
|
А |
|
|
||||||
координат по выбранному обобщенному параметру. |
|
|
|
|||||||||
6. |
Записать уравнение возможных работ по формуле (1). |
|
||||||||||
7. |
Определить искомый параметр. |
|
|
|
|
|
||||||
Задачи на применение принципаДвозможных перемещений рекомендуется решать по следующему алгоритму.
1.Изобразить рассматриваемую механическую систему на рисунке в соответствующем масштабе.
2.Приложить к механической системе активные нагрузки.
3.При наличии неидеальных связей добавить соответствующие реакции связей (например, силы трения).
4.Для определения реакции связи эту реакцию перенести в разряд активных сил путём замены существующей связи на связь, допускающую возможное перемещение в направлении, как правило, противоположном направлению определяемой реакции связи.
5.Задать возможное перемещение одной из точек механической
системы и выразить возможные перемещения точек приложения сил в зависимости от заданного возможного перемещения.И
125
6.Вычислить сумму работ активных сил на возможных перемещениях их точек приложения и приравнять эту сумму нулю.
7.Решив составленное уравнение, определить искомую величину.
10.2. Примеры выполнения расчетно-графической (контрольной) |
|
работы «Применение принципа возможных перемещений к решению |
|
С |
|
задач о равновесии сил, приложенных к механической системе с одной |
|
|
степенью свободы» |
|
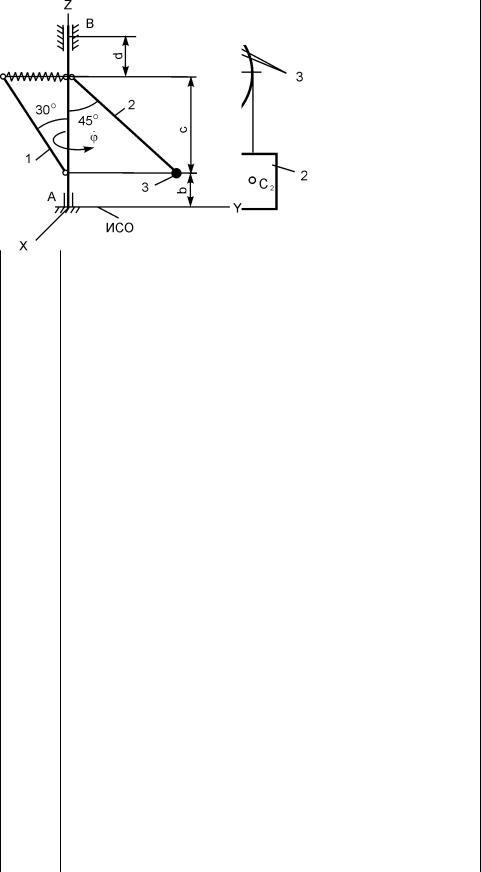
10.2.1. Кулисный механизм |
На кр вош п О1А кулисного механизма, расположенного в
плоскости, действует вращающий момент М (рис. 1). |
|
горизонтальной |
|
б |
|
А |
|
Д |
|
Применяя принцип возможных перемещений, определить какую силу |
|
Q следует приложить к кулисе в точке D, чтобы уравновесить механизм в |
|
момент, когда AO1O2 =90°; O1O2A = φ. Трением пренебречь. |
|
Дано: момент М; углы AO1O2 =90°; |
O1O2A = φ. |
Определить: Q |
И |
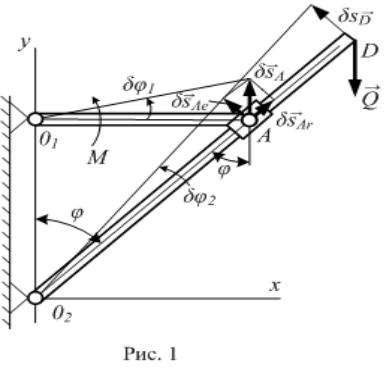
Решение.
Применим геометрический метод. Механизм имеет одну степень свободы, сообщим ему возможное перемещение.
Повернём кривошип О1А на угол δφ1, при этом ползун А получит относительное возможное перемещение S Ar вдоль кулисы и переносное
возможное перемещение S Ae вместе с кулисой.
126

Кулиса О2А повернётся на угол δφ2, а абсолютное возможное перемещение ползуна будет δsА.
Составим уравнение paбот
М δφ1+Q SD cos(90o ) =0.
Определим δφ1, используя чертеж, |
|
|
|
|
|
|
|
|
|
|||||||||||||||||||
С |
|
|
|
|
|
|
|
1 sA O1A . |
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
Для точки А ползуна, совершающего сложное движение, построим |
||||||||||||||||||||||||||||
и |
|
|
|
sA sAe sAr , |
|
|
|
|||||||||||||||||||||
векторный параллелограмм (рис. 1) |
определяющий |
|||||||||||||||||||||||||||
абсолютное возможное перемещение sA как векторную сумму |
||||||||||||||||||||||||||||
возможных перемещен й. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
Используя угол φ, найдем sAe |
|
из векторного |
прямоугольного |
|||||||||||||||||||||||||
б2 |
|
|
|
|
|
|
|
|||||||||||||||||||||
треугольн ка : |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
sAe = sA sin . |
|
|
|
|
|
|
|
|||||
Зап шем 2 |
|
sAe |
|
|
sA sin |
. |
|
|
|
|
|
|
|
|
|
|||||||||||||
O2 A |
|
|
O2 A |
|
|
|
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
А |
|
|
|
|
||||||||||||||
Определим |
O A |
|
O1 A |
|
. |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
Тогда |
|
|
|
|
|
|
|
|
|
|
|
sin |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
s |
A |
sin2 |
|
и s |
|
|
|
O D |
s |
A |
sin2 O D |
. |
|
|||||||||||
2 |
|
|
|
|
|
|
|
|
D |
2 |
|
|
|
2 |
|
|||||||||||||
|
|
|
|
|
|
O1A |
|
|
|
|
|
|
|
2 |
|
|
|
O1A |
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
Подставляя δφ1 и sD в уравнение работ, получим |
|
|
|
|||||||||||||||||||||||||
|
|
s |
|
|
|
|
|
s |
|
sin3 |
O D |
|
|
|
|
|
|
|
|
M |
|
|
||||||
М |
|
|
|
A |
Q |
|
|
A |
|
|
|
|
2 |
Д0 , откуда Q |
. |
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
3 |
|
|
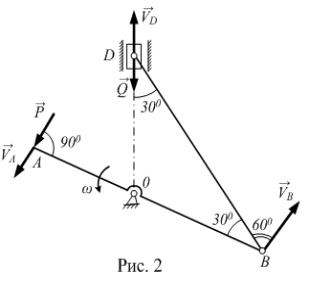
10.2.2.Четырехзвенный кривошипно-ползунныйИмеханизм
К плоскому механизму, изображенному на рис. 2, приложены силы Р и Q . Механизм находится в равновесии, трением пренебречь.O A O A O D sin
127
С |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Дано: Р=450 Н; ОВ 5 ОА; |
OВD= ОDВ=30º. |
||||||||||||||
|
4 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
иОпредел ть: вел ч ну силы Q. |
|
|
|
|
|
|
|
|
|||||||
Решен е. Пр мен м |
кинематический метод решения задачи. |
||||||||||||||
Механ зм меет одну степень сво оды. Стержню |
|
сообщим возможную |
|||||||||||||
АВ |
|||||||||||||||
угловую скорость ω вращения вокруг точки О. |
|
|
|||||||||||||
Покажембвекторы скоростей точек , В и D. |
|
|
|||||||||||||
Составим уравнение возможных скоростей: |
|
|
|||||||||||||
|
|
|
PVA |
– QVD=0. |
|
|
|
|
|||||||
Соотношения скоростей точек |
Д |
||||||||||||||
|
и В стержня имеют вид |
||||||||||||||
VA |
OA |
, откуда |
|
|
|
|
VB |
5VA. |
|||||||
VB |
OB |
|
|
|
|
|
|
|
|
|
|
|
|
4 |
|
Стержень ВD совершает плоскопараллельное движение. |
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
И |
||
На основании теоремы о проекциях скоростей |
|||||||||||||||
VBсos60 0 =VD соs30 0 ; |
VD |
VB |
cos 600 |
|
5VA tg 300 . |
||||||||||
|
|
|
|
|
|
|
|
|
|
cos300 |
4 |
||||
Уравнение возможных мощностей принимает вид |
|||||||||||||||
|
PVA Q |
5 |
VA tg 30 |
0 |
0 , |
|
|
||||||||
|
4 |
|
|
|
|
||||||||||
откуда |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
4P |
|
|
|
|
|
|
|
|
|
||
|
Q |
|
|
|
|
623 |
|
|
H. |
|
|
||||
|
|
5 tg 300 |
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
||||
128
10.3. Варианты расчетно-графической (контрольной) работы «Применение принципа возможных перемещений к решению задач о равновесии сил, приложенных к механической системе с одной степенью свободы»
хемы механизмов, находящихся под действием взаимно уравновешивающихся сил, и необходимые для расчёта данные приведены
в табл. 10.1. |
|
|
|
В расчётах |
спользовать следующие условные обозначения: с – |
||
коэфф ц ент жёсткости пружины (Н/см); h – деформация пружины (см); |
|||
Q, P – с лы (Н); М – момент пары сил (Н·м). |
|||
С |
|
|
|
Пр мечан я: |
|
|
|
Вар ант 6. Вес |
О1А не учитывать. |
||
Вар ант 7. Пруж на сжата. |
|
||
Вар ант 8. Пруж на сжата. |
|
||
рукоятки |
|
||
б1 2 |
|||
Вар ант 10. |
Вес рукоятки ОА не учитывать. |
||
Вариант 14. |
Вес стержней ОА и ОВ не учитывать; пружина растянута. |
||
Вариант 16. |
Вес стержней О |
и О В не учитывать. |
|
Вариант 18. |
Р – вес лока радиуса R3. |
||
Вариант 19. |
Вес звена |
не учитывать. |
|
Вариант 24. |
Пружина сжата. |
||
Вариант 25. |
АВ |
||
Вес стержней |
О и ВО не учитывать. Пружина растянута. |
||
Вариант 26. |
Пружина растянута. |
||
Применяя принцип возможныхДперемещений и пренебрегая силами |
|||
сопротивления, определить величину, указанную в последнем столбце |
|||
табл. 10.1. |
|
|
И |
|
|
|
|
129
|
|
Таблица 10.1 |
|
|
|
|
|
Номер |
|
Исходные |
|
|
данные, |
||
вариан |
|
||
Расчётная схема механизма |
определяемая |
||
та |
|||
|
величина |
||
|
|
||
1 |
2 |
3 |
|
и |
|
ОА = 10 см; |
|||
С1 |
|
|
||||
|
|
М = 20 Н·м; |
||||
|
б |
|
P = ? |
|||
|
|
|
|
|||
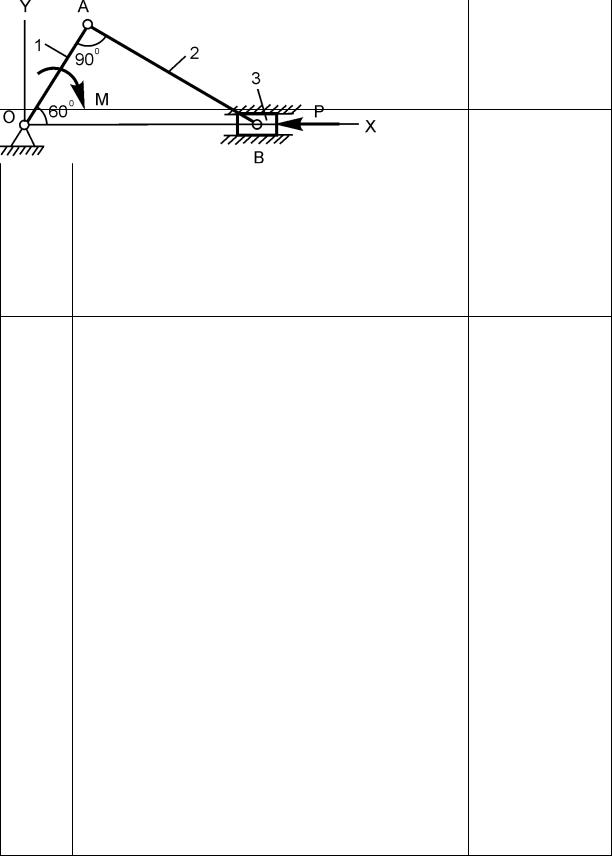
2 |
А |
О1А = 20 см; |
||||
|
|
Р = 100 Н; |
||||
|
|
|
Д |
|||
|
|
|
|
|
M = ? |
|
|
|
|
|
|
|
|
|
|
|
|
R2 = 40 см; |
||
|
|
|
|
r2 |
= 30 см; |
|
3 |
|
ИR3 = 20 см; |
||||
|
|
|
|
M = 100 Н·м; |
||
|
|
|
|
|
Q = ? |
|
130