

2192
.pdfПРИЛОЖЕНИЕ
ТЕОРЕТИЧЕСКИЙ МАТЕРИАЛ СТАТИКА
1. ОСНОВНЫЕ ПОНЯТИЯ И АКСИОМЫ
1.1. Основные понятия и терминология
Матер альная точка является моделью материального тела любой формы, размеры которого в данной задаче не существенны и которое
можно пр нять за геометрическую точку, имеющую определенную массу. |
|
С |
называют совокупность взаимосвязанных |
Механ ческой с стемой |
|
точек. |
|
Абсолютно твердым телом (или геометрически неизменяемой |
|
материальных |
|
б |
|
механической с стемой) называют механическую систему материальных |
|
точек, расстоян я между которыми не изменяются при взаимодействии с |
|
другими телами. Все тела в природе в той или иной мере деформируемы, |
|
но в некоторых задачах деформациями тел можно пренебречь, считая их твердыми. В дальнейшем а солютно твердое тело будем называть твердым телом или просто телом.
Абсолютно упругим телом в теоретической механике называют тело, |
|||
расстояние между точками которого на линии действия силы при |
|||
взаимодействии с другим телом изменяется пропорционально модулю |
|||
действующей силы. Примерами таких тел являются пружина, идеальный |
|||
газ и др. Понятие |
А |
|
|
силы в теоретической механике является основным и |
|||
первичным. Силой |
называют меру механического действия одного тела на |
||
другое. Сила определяется тремя |
элементами: числовым |
значением |
|
(модулем), направлением и точкой приложения. За единицу модуля силы в |
|||
системе СИ принимается ньютон |
(Н). Направление силы |
определяют |
|
|
Д |
||
линией ее действия, т.е. прямой, вдоль которой направлена сила. Точку |
|||
приложения силы на расчетных схемах указывают в начале или конце вектора силы. Силу как величину векторную обозначают заглавной буквой
латинского алфавита со знаком вектора сверху, например F или P . Для
выражения числового |
значения силы или ее модуля используют знак |
||||
|
|
|
|
И |
|
модуля от вектора, т.е. |
F |
, |
P |
||
, или те же буквы, но без знаков вектора, т.е. |
|||||
F , P .
1.2. Аксиомы статики
Аксиомы механики проверяют на опыте как непосредственно, так и по следствиям, которые из них получают.
141

При |
формулировке |
аксиом |
||
предполагают, что на твердое тело или |
||||
материальную точку действуют силы, |
||||
которые |
указаны |
в соответствующей |
||
аксиоме. Твердое тело или материальную |
||||
точку в общем случае считают |
||||
С |
|
|
|
|
свободными, если они имеют возможность |
||||
совершать |
в рассматриваемый |
момент |
||
времени |
любые |
перемещения |
в |
|
пространстве.
системы двух с л, пр ложенных к точкам твердого тела, необходимо и
противоположныхI. Акс ома о равновесии системы двух сил. Для равновесия
достаточно, |
чтобы эти с лы ыли равны по модулю и действовали вдоль |
|||
одной прямой, |
проходящей через точки их |
приложения, |
в |
|
|
|
направлениях (рис. 1.1). Этой аксиомой устанавливается |
||
|
б |
силы F1 и F2 |
||
простейшая с стема с л, эквивалентная нулю. Если |
||||
находятся |
равновес , то они о разуют систему сил, эквивалентную |
|||
нулю. Действ е такой системы сил на покоящееся |
твердое тело |
не |
||
изменяет состоян |
я покоя этого тела. ксиома справедлива и для сил, |
|||
|
|
А |
|
|
приложенных к одной точке. |
|
|
||
II. Аксиома о до авлении (отбрасывании) системы двух сил,
эквивалентной нулю. Если на твердое тело действует система сил, то к ней можно добавить (от росить) систему сил, эквивалентную нулю.
Полученная после до авления (от расывания) новая система сил является эквивалентной первоначальной системе сил. Под действием заданной системы сил и новой, полученной после добавления (отбрасывания) равновесной системы сил, тело будет двигаться (или находиться в покое) совершенно одинаково при прочих равных условиях. В частности, к любой системе сил можно добавить (отбросить) простейшую уравновешенную
|
|
|
И |
систему сил, состоящую из двух равных по модулю сил, действующих |
|||
вдоль одной прямой в противоположныхДнаправлениях и приложенных к |
|||
одной или разным точкам твердого тела в соответствии с первой аксиомой. |
|||
III. Аксиома |
параллелограмма |
|
|
двух сил. Две силы, действующие в |
|
||
одной точке твердого тела или на одну |
|
||
материальную точку, можно заменить |
|
||
одной равнодействующей силой, равной |
|
||
по модулю и направлению диагонали |
|
||
параллелограмма, |
построенного на |
|
|
заданных силах (рис. 1.2). Справедливо и |
|
||
обратное. Одну силу, приняв за |
|
||
равнодействующую, |
всегда |
можно |
|
разложить по правилу параллелограмма
142
на две составляющие силы.
Замену двух сил одной равнодействующей силой по правилу параллелограмма называют векторным сложением этих сил.
Исторически из правила параллелограмма сил впоследствии возникла |
||||||||||||||||||
векторная алгебра, в которой под векторами понимают любые векторные |
||||||||||||||||||
величины (силы, скорости, ускорения и т.п.), действия над которыми |
||||||||||||||||||
С |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
подчиняются единым правилам, разработанным в математике. |
||||||||||||||||||
Векторное сложение сил F1 и F2 в математике записывают так: |
||||||||||||||||||
|
|
|
|
|
|
|
|
R = F |
+ F . |
|
|
(1.2) |
||||||
векторами |
1 |
|
|
2 |
1 |
|
2 |
|
|
|
||||||||
Если |
с лы |
F1 |
F2 |
направлены |
по одной прямой в одну или |
|||||||||||||
противоположные стороны, то векторное сложение превращается в |
||||||||||||||||||
алгебра ческое. Модуль равнодействующей |
силы R |
как векторную |
||||||||||||||||
сумму с л выч сляют по формуле |
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
б1 2 |
|
|
|
|
|
|||||||||||
|
|
|
|
|
R = |
F 2 F 2 |
2F |
F |
cos , |
|
(1.3) |
|||||||
|
|
|
|
|
|
1 |
|
2 |
|
|
|
1 |
2 |
|
|
|
|
|
где угол между |
|
|
|
F и F (см. рис. 1.2), |
|
|||||||||||||
|
|
|
|
|
|
|
1 2 , |
|
|
|
|
силой R и |
||||||
здесь |
, |
2 |
|
углы |
между |
|
|
равнодействующей |
||||||||||
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
соответствующими силами F и F . |
|
|
|
|
|
|
|
|
||||||||||
Применяя теорему синусов к одному из треугольников |
||||||||||||||||||
параллелограмма сил, определяют силы |
F1 |
|
и |
F2 , т.е. решают обратную |
||||||||||||||
|
|
|
|
|
|
|
|
|
Д1 2 |
|||||||||
задачу разложения силы R на два направления: |
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
АF F R |
|
||||||||||||
|
|
|
|
|
|
|
|
1 |
|
|
|
|
2 |
|
|
|
. |
(1.4) |
|
|
|
|
|
|
|
sin |
2 |
|
sin |
|
|
sin |
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
||
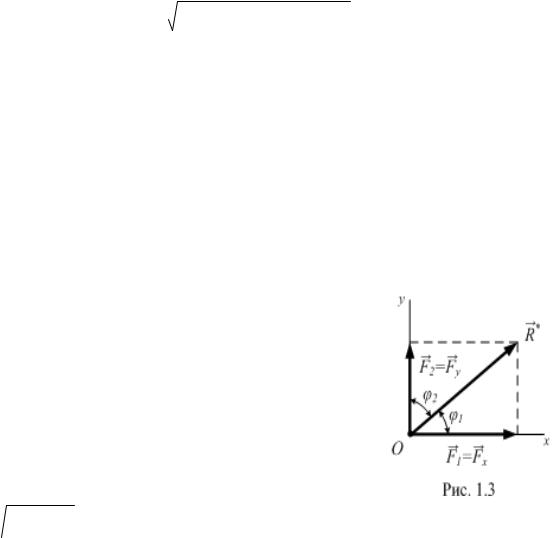
Из |
|
аксиомы |
параллелограмма |
|
сил |
|
|
|||||||||||
получают |
|
путем |
задания |
|
угла |
между |
|
|
||||||||||
векторами |
двух |
сил |
|
|
|
И |
||||||||||||
|
90 |
|
|
|||||||||||||||
прямоугольную систему координат Oxy (рис. |
|
|
||||||||||||||||
1.3), которая является главным инструментом |
|
|
||||||||||||||||
в теоретической механике для исследования |
|
|
||||||||||||||||
плоских |
|
систем |
сил. |
|
|
|
|
Модуль |
|
|
||||||||
равнодействующей двух сил в плоской |
|
|
||||||||||||||||
прямоугольной |
|
системе |
|
|
|
|
координат |
|
|
|||||||||
определяют |
|
по |
теореме |
|
|
|
Пифагора |
|
|
|||||||||
R  Fx2 Fy2 .
Fx2 Fy2 .
IV. Аксиома параллелепипеда трех сил. Сложение трех сходящихся сил, не лежащих в одной плоскости. Разложение
143
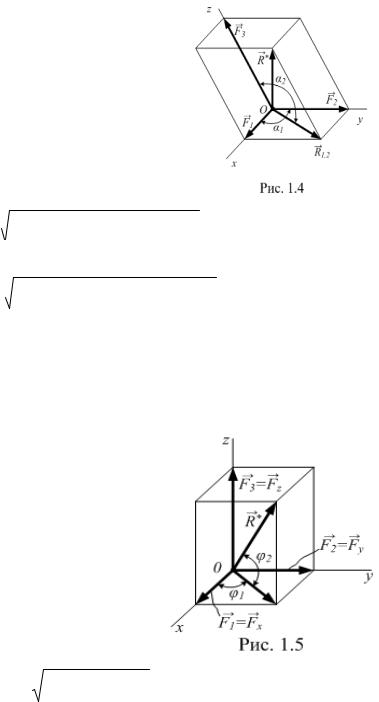
силы на три направления. Три силы, действующие в одной точке тела или на материальную точку, можно заменить одной равнодействующей силой, равной по модулю и направлению диагонали параллелепипеда, построенного на заданных силах (рис. 1.4).
В точке О приложены три произвольные |
|
|
|
|
|
|
|
|
||||||||||
силы F1, |
F2 , |
F3, не лежащие в одной |
|
|
|
|
|
|
|
|
||||||||
плоскости. Линии действия этих сил можно |
|
|
|
|
|
|
|
|
||||||||||
использовать в |
|
качестве |
пространственной |
|
|
|
|
|
|
|
|
|||||||
косоугольной с стемы координат Оxyz. |
|
|
|
|
|
|
|
|
|
|
|
|||||||
Для |
определен я |
равнодействующей |
|
|
|
|
|
|
|
|
||||||||
таких |
с л |
|
|
спользуют |
правило |
|
|
|
|
|
|
|
|
|||||
параллелограмма. Сначала складывают две |
|
|
|
|
|
|
|
|
||||||||||
С |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
F1 |
F2 , находящ еся в плоскости Оxy: |
|
|
|
|
|
|
|
|
|||||||||
|
|
|
R* |
F 2 F 2 2F F |
|
cos |
1 |
. |
|
|
|
|
|
|||||
|
|
|
|
1,2 |
1 |
2 |
1 |
2 |
|
|
|
|
|
|
|
|
||
Потом складывают два вектора R1,2 и F3 , снова используют правило |
||||||||||||||||||
силы |
F 2 |
2R |
F cos |
|
, где |
|
, |
|
углы |
|||||||||
параллелограмма с л: |
R* |
R2 |
2 |
1 |
2 |
|||||||||||||
|
|
|
|
|
1,2 |
3 |
|
1,2 |
|
3 |
|
|
|
|
|
|||
между векторами соответствующих сил (см. рис. 1.4). Таким образом, |
||||||||||
равнодействующая трех сходящихся сил, не лежащих в одной плоскости, |
||||||||||
равна диагоналибкосоугольного параллелепипеда, построенного на этих |
||||||||||
силах. |
|
|
|
|
|
|
|
+ F |
+ F . |
|
|
Векторная запись этого условия имеет вид R = F1 |
|||||||||
|
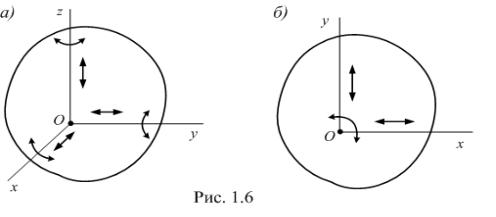
Из аксиомы параллелепипеда трех сил, |
|
|
2 |
3 |
|||||
|
|
|
|
|
||||||
не лежащих в одной плоскости, получают |
|
|
|
|
||||||
пространственную |
А |
|
|
|||||||
прямоугольную |
|
|
|
|
||||||
декартову систему координат путем задания |
|
|
|
|
||||||
в |
косоугольном |
параллелепипеде |
|
углов |
|
|
|
|
||
1 |
90 ; 2 90 (рис. 1.5). |
|
Д |
|||||||
|
Равнодействующая |
R |
||||||||
|
|
|
трех |
И |
||||||
ортогональных сил, исходящих из одной |
||||||||||
точки, равна диагонали прямоугольного |
||||||||||
параллелепипеда, построенного на этих |
||||||||||
силах: |
|
|
|
|
|
|||||
|
|
|
|
2 |
2 |
2 |
||||
|
|
R |
Fx Fy Fz . |
|||||||
|
|
|
|
|
|
|||||
|
Разложение силы R на направления прямоугольных осей координат |
|||||||||
выполняют с помощью двух углов 1, 2 (см. рис. 1.5): |
|
|
||||||||
|
Fx Rcos 2 cos 1 ; |
Fy R cos 2 sin 1; |
Fz Rsin 2 . |
|||||||
V. Аксиома о равенстве сил действия и противодействия это один из основных законов классической механики, сформулированных
144
Ньютоном: любой силе действия имеется равная и противоположно направленная сила противодействия. Из аксиомы следует, что силы
взаимодействия двух материальных точек равны по модулю, |
||
противоположны по направлению и действуют вдоль одной прямой, |
||
проходящей через взаимодействующие точки. Материальные точки при |
||
этом могут взаимодействовать как через силовые поля, т.е. на расстоянии, |
||
С |
||
так и путем соприкосновения друг с другом. В статике эту аксиому |
||
применяют для твердых тел. Силы взаимодействия двух твердых тел (при |
||
взаимодейств |
путем соприкосновения или на расстоянии при посредстве |
|
силовых полей) равны по модулю и противоположны по направлению. |
||
илы действ я |
прот водействия всегда приложены к разным телам или к |
|
условиямиравновес я с л, приложенных к твердому и деформируемому |
||
различным |
вза модействующим точкам одного и того же тела. Таким |
|
образом, в пр роде с лы встречаются всегда по две: сила действия и |
||
противодейств |
я. |
|
VI. Акс |
ома затвердевания. Равновесие деформируемого тела не |
|
б |
||
наруш тся, если на него наложить дополнительное условие превращения |
||
его в абсолютно твердое тело. Аксиома устанавливает связь между |
||
телам. Из акс омы следует, что условия равновесия сил, приложенных к |
||
|
|
А |
твердому телу, нео ход мы и для равновесия деформируемого тела. |
||
1.3. Несво одное твердое тело. Основные типы |
||
|
|
связей и их реакции |
|
|
Д |
Твердое тело, на перемещение которого не наложено никаких ограничений, называют свободным. Свободное твердое тело в пространстве
имеет шесть степеней свободы: оно может перемещаться вдоль осей декартовых координат Оx, Oy, Oz и вращаться вокруг каждой из этих осей
(рис. 1.6, а). И
Свободное твердое тело на плоскости имеет три степени свободы: оно может перемещаться вдоль осей Ox и Oy, вращаться вокруг любой точки
145
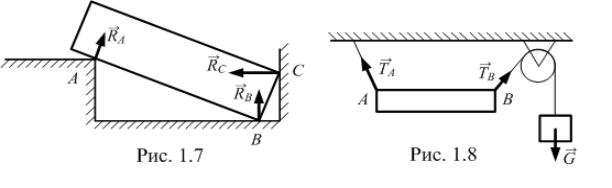
плоскости, например, точки О (рис. 1.6, б). Тело, ограничивающее свободу движения другого тела, является по отношению к нему связью.
Твердое тело, свобода движения которого ограничена связями,
называют |
несвободным. Все силы, действующие на несвободное твердое |
тело, наряду с делением на внешние и внутренние, можно разделить на |
|
активные (задаваемые) и реакции связей. Активные силы выражают |
|
С |
|
действия на твердое тело других тел, вызывающих или стремящихся |
|
вызвать |
изменение его кинематического состояния (например, |
равновес |
я). |
Реакц ей связи называют силу или систему сил, выражающих механическое действ е связи на тело. Одним из основных положений механики является пр нцип освобождаемости от связей: любое
несвободное твердое тело можно превратить в свободное, если
освобод ть его от связей, заменив их действие силами реакций. При определен направлен й реакций связей можно использовать следующее
: куда запрещено перемещение, оттуда направлена реакция
1. Гладкое касание (рис. 1.7). Реакция гладкой поверхности направлена по нормали к поверхности в точке касания.
связи. |
|
правило |
|
Для плоской с стемы сил рассмотрим восемь основных типов |
|
связей направлен я х реакций. |
|
|
б |
2.Нить (рис. 1.8). Нитью называют любую гибкую связь (канат, цепь
ит.п.), препятствующую перемещению тела в одном направлении вдоль нити. Реакция направлена вдоль нити от тела, TB = G.А
Д
3. Невесомый стержень (рис. 1.9). НевесомымИстержнем называют тело с двумя шарнирами на его концах, весом которого можно пренебречь, причем силовые воздействия приложены только в шарнирах. Для
прямолинейного стержня реакция RA направлена вдоль стержня, для изогнутого реакция RВ направлена вдоль линии действия, проходящей
через шарниры. Направление реакции (от тела или к телу) заранее неизвестно, так как зависит от действия других сил на тело.
146
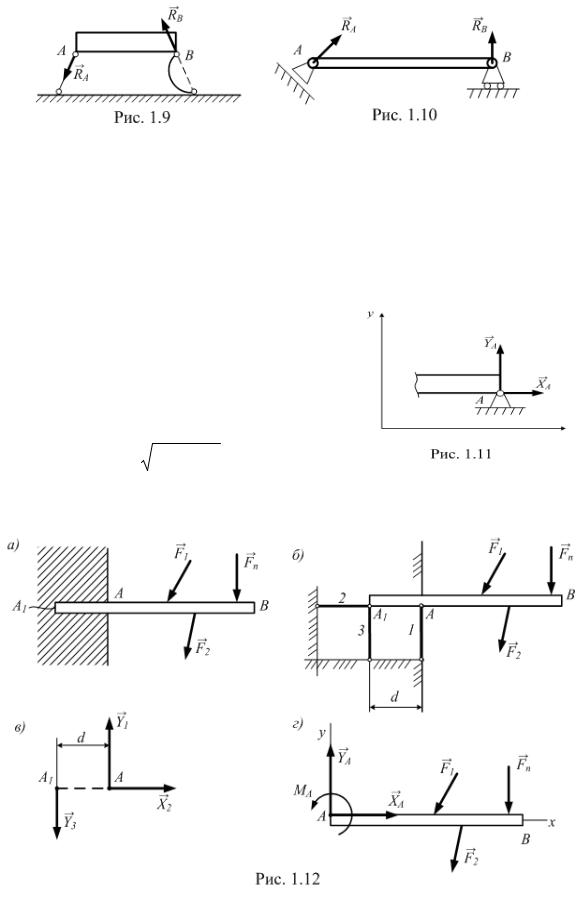
4. Подвижные цилиндрические шарниры А и В на плоских подшипниках (рис. 1.10).
С |
|
|
|
|
||||
Реакц я направлена перпендикулярно опорной поверхности. Это |
||||||||
поверхности |
|
|||||||
объясняется тем, что данная связь запрещает перемещение балки в |
||||||||
направлен |
|
, |
перпенд кулярном опорной поверхности, оставляя |
|||||
возможным поворот вокруг шарнира, а также перекатывание на катках |
||||||||
вдоль этой |
|
|
|
|
(шарнир В). На расчетных схемах катки можно не |
|||
показывать, |
огран ч ваясь показом зазора между подвижным шарниром и |
|||||||
|
|
б |
||||||
опорной поверхностью (шарнир А). |
||||||||
5. |
Неподв жный |
цилиндрический |
||||||
шарнир |
(р |
|
с. 1.11). Реакция заменяется |
|||||
двумя |
|
|
вза мно-перпендикулярными |
|||||
|
|
|
|
|
А |
|||
составляющими |
X A |
и |
YA , |
параллельными |
||||
предварительно проведенным осям Ox и Oy. |
||||||||
Модуль реакции |
|
|
|
|
Д |
|||
|
|
|
RA |
X A2 YA2 . |
||||
6. Жесткая заделка |
|
|||||||
|
|
|||||||
Балка АВ одним концом |
|
1 заделана в стену (рис. 1.12, а). |
||||||
|
|
|
|
|
|
|
|
И |
147

Такое крепление консольной балки называют плоской жесткой заделкой в точке А. На балку действует система сил ( F1, F2 , …, Fn ).
Определим реакции, которые необходимо приложить к балке при освобождении ее от связей в точке А. Чтобы свободное твердое тело в плоскости превратить в неподвижное, необходимо исключить возможность горизонтального и вертикального перемещения балки в точке А. Чтобы исключить возможность поворота сечения балки в точке А,
Снеобходимо наложить еще одну связь. Таким образом, в точке А балка имеет три связи, при освобождении от которых в точке А сечения балки необход мо пр лож ть три реакции.
На р с. 1.12, б показана модель плоской жесткой заделки,
составленная з трех стержней. При освобождении от связей в шарнирах, соединяющформируютсях стержни с балкой в точках А и А1, показаны реакции связей, направленные вдоль соответствующих стержней (рис. 1.12, в). Если силу
реакции Y3, пр ложенную в точке А1, перенести параллельно самой себе в |
|||
точку А, то дополн тельно в точке А получим вертикальную силу и |
|||
б |
|
|
|
присоед ненный момент пары сил. Таким образом, из указанных сил |
|||
три реакц и связи X , Y |
, M |
плоской жесткой заделки, |
|
показанные в точке А (р с. 1.12, г), где X |
= X2 ; |
YА = Y1 Y3 ; |
MА = |
Y3 |
d. |
А |
|||
|
|
Неизвестные реакции X2 |
, Y1 |
, Y3 |
и плечо d в данном случае |
являются условными, дополнительными величинами, которые введены для обоснования числа реакций в плоской жесткой заделке, поэтому их определять не надо.
На расчетной схеме (рис. 1.12, г) известны силы F1 |
, F2 , …, |
Fn и |
|
|
|
Д |
|
|
точки их приложения на консольной балке. Неизвестными являются |
||
реакции, показанные в точке , которые определяют из трех уравнений |
||
равновесия, записанных для плоской системы произвольных сил. |
|
|
7. Скользящая заделка с одной степенью свободы
степень свободы (рис. 1.13, а). Две другие степени свободы (перемещение в направлении, перпендикулярном направляющей, и поворот вокруг точки А) запрещены. При освобождении от связи ее действие заменяется
реакцией |
RA , направленной перпендикулярно направляющей, и |
|||
реактивным |
моментом |
МA , |
соответствующим |
запрещенным |
Рассмотрим балку АВ, имеющую возможность вертикального перемещения вдоль направляющей в точке ИА, т.е. реализующую одну
Рис. 1.13
148
8. Скользящая заделка с двумя степенями свободы
Рассмотрим балку АВ, имеющую возможность перемещения по двум взаимно-перпендикулярным направлениям в точке А (рис. 1.14, а).
Балка лишена одной степени свободы вращения вокруг точки А , следовательно, при освобождении от связи ее действие заменяется реактивным моментом МA (рис. 1.14,б).
С |
|
|
|
|
||
их |
|
|
||||
|
|
|
|
Рис. 1.14 |
|
|
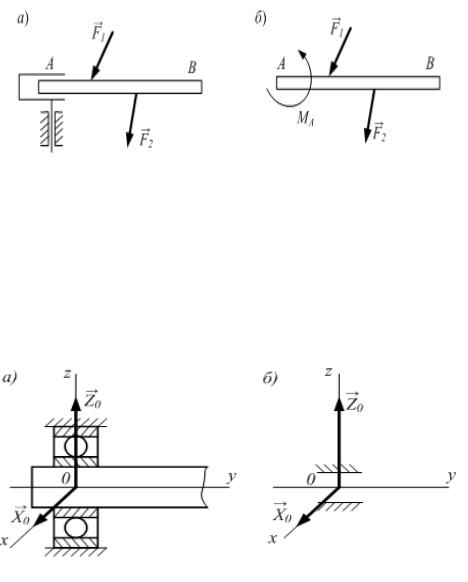
Для пространственной системы сил рассмотрим четыре основных |
||||||
типа связей направлен я |
реакций. |
|
|
|||
|
балки |
|
|
|||
1. Подш пн |
|
|
изо раженный на рис. 1.15,а, |
|
||
Подш пн к |
качен я, |
допускает |
||||
возможность поворота алки (вала) на некоторый угол вокруг осей Ox и |
||||||
|
|
|
А |
|
||
Oz, перпендикулярных оси подшипника Oy. Возможно также осевое |
||||||
перемещение |
|
. |
|
|
|
|
|
|
|
|
Д |
||
|
|
|
|
Рис. 1.15 |
И |
|
|
|
|
|
|
|
|
Данная связь лишает балку двух степеней свободы: запрещает |
||||||
перемещение вдоль осей Ox и Oz, перпендикулярных оси балки. На |
||||||
расчетной схеме реакция заменяется двумя составляющими: X 0 |
и Z 0 (рис. |
|||||
1.15,б). |
|
|
|
|
|
|
149
2. Шаровой шарнир и подпятник
На рис. 1.16 и 1.17 изображены шаровый шарнир и подпятник. Балка лишена возможности перемещения вдоль каждой их трех координатных
осей, поэтому на расчетной схеме показывают три составляющие опорной реакции: X 0, Y 0, Z 0.
С |
|
|
|
|
|
|
|
|
ли |
|
|
|
|
|
|||
Подпятн к представляет со ой сочетание цилиндрического шарнира с |
||||||||
б |
|
|
|
|||||
опорной поверхностью |
плоскостью. |
|
|
|
|
|
||
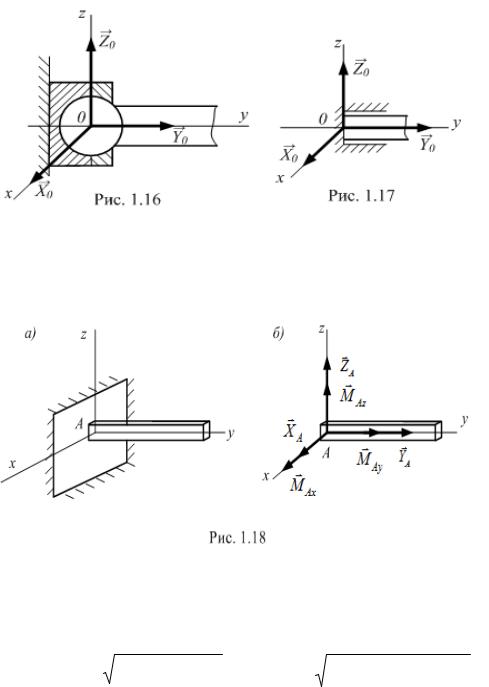
3. Жесткая заделка |
|
|
|
|
|
|
|
|
На р с. 1.18,а |
зо ражена пространственная жесткая заделка. |
|||||||
|
А |
|
|
|||||
|
|
|
Д* |
|||||
|
|
|
|
|
|
И |
||
Данная связь лишает балку всех шести степеней |
свободы в |
|||||||
пространстве. Реакция |
приводится к равнодействующей RA , которая |
|||||||
определяется через ее проекции на оси ХА, YА, ZА, и к паре сил с векторным |
||||||||
моментом МА, проекции которого на оси |
МAx, МАy, MAz. |
|
|
|||||
R* |
X 2 |
Y 2 |
Z 2 ; |
M |
A |
M 2 M |
2 M 2 . |
|
A |
A |
A |
A |
|
Ax |
Ay |
Az |
|
150