

2192
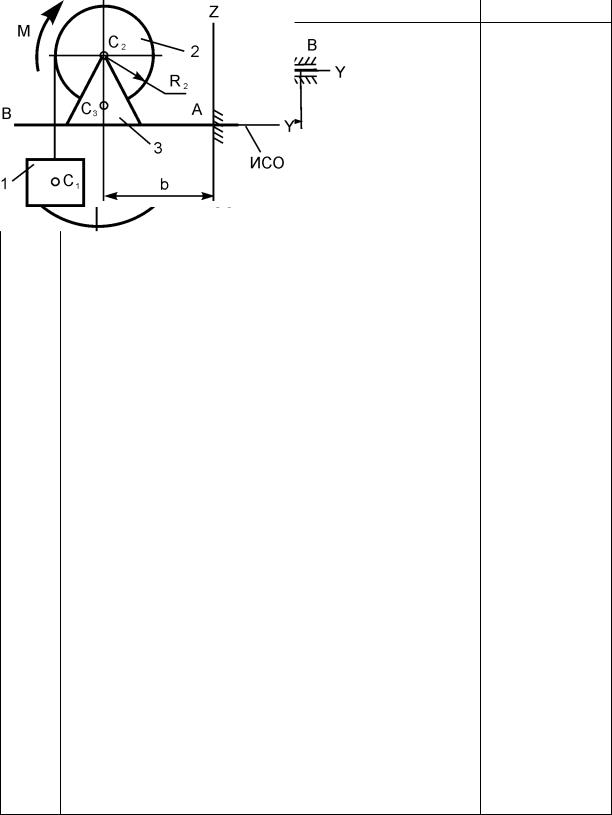
.pdfРазложим равнодействующую сил инерции на вращательную ФB и центробежную ФЦ составляющие, модули которых
ФB macB mR Gg R ; ФЦ macЦ mR 2 Gg R 2 .
С2 |
и 2 покажем два способа. |
|
|
|
|
|
|||||||||||||||||||
Для определения |
|
|
|
|
|
||||||||||||||||||||
Первый способ основан на применении теоремы об изменении |
|||||||||||||||||||||||||
кинетической энерг |
механической системы: |
|
|
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
T T |
Ae . |
|
|
|
|
|
|
|
|
|
(2) |
||||||
Здесь |
T0 0 , |
|
|
|
|
|
|
|
0 |
|
|
|
k |
|
|
|
|
|
|
|
|
|
|
||
так как движение диска началось из состояния покоя |
|||||||||||||||||||||||||
T J x . |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
б |
|
|
|
|
|
|
|
|
|
|||||||||||||||
Ось x проход т через ось вращения однородного диска, поэтому на |
|||||||||||||||||||||||||
основан |
теоремы Гюйгенcа-Штейнера |
|
|
|
|
|
|
|
|
|
|
||||||||||||||
иmR2 |
|
|
3 |
|
|
|
|
3 G |
|
|
|||||||||||||||
|
|
J x |
|
Jcx |
mR |
2 |
|
|
|
|
|
mR2 |
|
|
mR2 |
|
|
|
R2 . |
|
|||||
|
|
|
|
2 |
|
2 |
2 |
g |
|
||||||||||||||||
|
|
|
|
|
А2 |
|
|
|
|||||||||||||||||
Отсюда |
T |
3GR2 2 |
|
3GR |
2 2 |
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
2 |
g |
2 |
|
|
|
4g |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Работу внешних сил совершает сила тяжести: |
|
|
|
|
|
||||||||||||||||||||
|
Ae |
A(G) |
; |
A(G) G H G(R R cos ) GR 1 cos . |
|||||||||||||||||||||
|
|
k |
|
|
|
|
|
|
|
|
|
Д |
|||||||||||||
Приравняем левую и правую части исходного уравнения (2): |
|||||||||||||||||||||||||
|
3GR2 2 |
GR(1 cos ) , |
|
откуда |
|
|
|
|
|
4g(1 cos ) |
. |
||||||||||||||
|
|
4g |
|
|
|
|
|
|
|
3R |
|||||||||||||||
Продифференцируем по времени последнее уравнение: |
|
||||||||||||||||||||||||
|
|
|
|
|
|
|
2 d 4g sin d . |
И |
|||||||||||||||||
|
|
d |
|
|
|
d |
|
dt |
|
|
3R |
|
|
dt |
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
Так как |
|
и |
, то |
|
2g sin . |
|
|
|
|
|
|||||||||||||||
|
|
dt |
|
|
|
dt |
|
|
|
|
|
|
|
|
3R |
|
|
|
|
|
|
|
|
||
Второй способ основан на применении дифференциального уравнения |
|||||||||||||||||||||||||
вращения твёрдого тела вокруг неподвижной оси: |
|
|
|
|
|
||||||||||||||||||||
|
|
|
|
e |
|
|
|
3G |
|
2 |
|
|
|
|
|
|
|
|
3R |
|
|
|
|
|
|
J x M x Fk |
или |
|
|
|
R |
|
GRsin |
; |
|
|
sin , откуда |
||||||||||||||
|
|
|
|
|
|
|
|
2g |
|
|
|
|
|
|
|
|
|
|
2g |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
2g |
sin . |
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
3R |
|
|
|
|
|
|
|
|
|
|
|
||
Поскольку ddt , введём промежуточную переменную d :
111
|
|
|
|
|
|
d |
d |
d |
|
|
|
d |
. |
|
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
dt |
|
|
|
d |
dt |
|
|
|
|
|
|
|
d |
|
|
|||||||||
Тогда, разделяя переменные, получим |
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||
С |
|
|
|
|
|
|
|
3R |
|
d sin d . |
|
|
|
|
|
|
||||||||||||||||||
|
|
|
|
|
|
|
2g |
|
|
|
|
|
|
|
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
Проинтегрируем последнее уравнение в пределах от нуля до : |
||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
3R |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
d sin d . |
|
|
|
|
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
2g |
|
|
|
|
|
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
3R |
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
Получ м |
|
|
|
|
|
|
|
|
cos |
|
|
|
, |
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
2g |
|
2 |
|
|
|
|
0 |
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
3R |
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
4g 1 cos |
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
откуда |
б |
|
|
|
|
|
|
|
|
|
|
|
. |
|||||||||||||||||||||
|
|
|
2g |
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
3R |
|
|
|
и4g |
|
|
|
2g |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
При |
= |
2 |
2 |
|
3R |
; |
|
|
|
|
3R |
. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
Вращательная с ла |
нерции |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
А |
|
|
||||||||||||||||||||||||||
|
|
|
|
|
|
|
Ф |
В |
|
G |
|
R |
G |
R |
2g |
|
|
2 |
G . |
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
g |
|
|
|
|
|
g |
|
3R |
|
|
|
|
|
3 |
|
|
|
|
||||
Центробежная сила инерции |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
ФЦ G R 2 G R |
4g |
|
|
|
4 G . |
|
|
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
g |
|
|
|
|
Д |
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
g |
|
3R |
|
|
|
|
|
3 |
|
|
|
||||||
Равнодействующая сил инерции |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
|
|
Ф ФВ 2 ФЦ 2 |
4 G2 |
16 G2 2 G 5 . |
||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
9 |
|
|
|
|
9 |
|
И |
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
3 |
|
|
||||||||
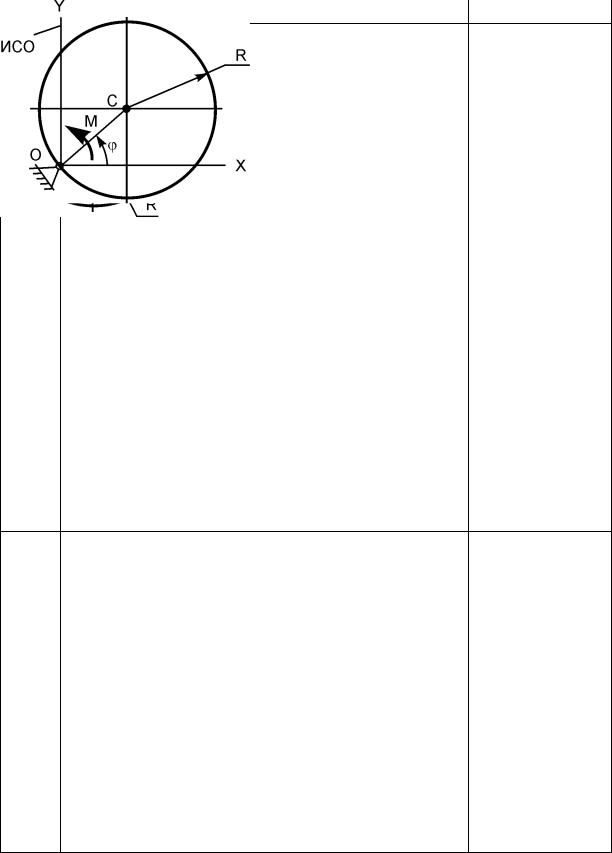
Линия действия равнодействующей Ф не проходит через центр масс
тела. Предположим, что линия действия Ф проходит по прямой, параллельной ac , и приложим её в точке К.
Главный момент сил инерции
Ф |
|
|
3 G |
|
2 2 g |
|
Ф |
|
3GR |
|
|
||||
|
|
|
|
M x |
|
|
|
||||||||
M x |
|
J x |
|
R |
|
|
|
GR ; h |
Ф |
|
|
|
0,67R . |
|
|
|
2 g |
3 R |
2G |
5 |
|
||||||||||
|
|
|
|
|
|
|
|
|
|||||||
Составим уравнения равновесия: |
Y ФЦ 4G 3 . |
|
|||||||||||||
|
|
F |
0 |
; Y ФЦ |
0 , откуда |
|
|||||||||
|
|
ky |
|
|
0 |
|
|
|
|
0 |
|
|
|
|
|
|
F |
0 ; |
G Z |
0 |
ФВ 0, |
откуда |
Z |
0 |
G ФВ |
G 3. |
|||||
|
|
kz |
|
|
|
|
|
|
|
|
|
|
|
||
112
9.4. Варианты расчетно-графической (контрольной) работы «Применение принципа Даламбера к определению реакций связей»
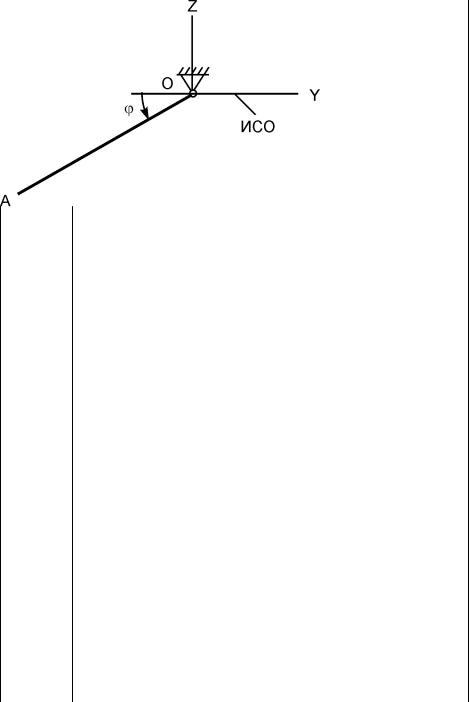
Определить реакции внешних связей механической системы: в заданном положении для вариантов 4, 5, 10, 19, 21 – 30; в момент времени t1 для вариантов 1, 8, 9, 20; в тот момент времени, когда угол поворота имеет значение φ1, для вариантов 2, 3, 6, 7.
На расчётных схемах плоскость OXY (AXY) горизонтальна, плоскость OYZ (AYZ) верт кальна.
Расчётные схемы механизмов и необходимые для решения данные |
|||
С |
|
|
|
табл. 9.1, в которой |
– угловая скорость; φ0, 0 – значения |
||
угла поворота угловой скорости в начальный момент времени. |
|||
Пр мечан я: |
|
|
|
приведены |
|
|
|
б |
|
|
|
Для вар анта 17. Рад ус инерции ротора 2 двигателя 3; iС2Х2 = 0,10 м. |
|||
Для вар анта 21. Рад ус инерции ротора 2 двигателя 3; iС2Х2 = 0,12 м. |
|||
А |
|||
Для варианта 25. Радиус инерции шкива 3 |
iС3Х3 |
= 0,18 м. |
|
Для варианта 26. Радиус инерции шкива 3 |
iС3Х3 |
= 0,22 м. |
|
Для варианта 27. Радиус инерции шкива 3 |
iС3Х3 |
= 0,15 м. |
|
|
Д |
||
Для варианта 28. Радиус инерции шкива 3 |
iС3Х3 |
= 0,15 м. |
|
Вращающиеся тела, для которых не задан радиус инерции, рассматривать как тонкие однородные стержни или сплошные однородные диски (варианты 5, 6 – 9, 12, 16, 20, 22).
|
На схемах вариантов 1, 8, 9, 16, 17, 20 – 22 указаны внешние моменты |
М. |
И |
|
113
|
|
|
|
|
Таблица 9.1 |
||
|
|
|
|
|
|
|
|
|
Номер |
|
|
|
Исходные |
||
|
вариан |
|
Расчётная схема механизма |
|
|
данные |
|
|
та |
|
|
|
|
|
|
С |
|
|
|
|
|
||
|
1 |
|
2 |
|
|
3 |
|
|
и |
|
m = 20 кг; |
|
|||
|
|
l = 0,60 м; |
|
||||
|
|
М = 1,0 Н·м; |
|
||||
1 |
|
|
|
|
|||
|
|
|
t1 = 10 c; |
|
|||
|
|
|
|
|
|
||
|
|
|
|
|
0 |
φ0 = 0о; |
|
|
|
|
|
|
= 0 рад/с |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
А |
m = 25 кг; |
|
||
|
|
б |
|
l = 0,50 м; |
|
||
2 |
|
φ = 60о; |
|
||||
|
|
|
|
1 |
|
||
|
|
|
|
|
0 |
φ0 = 0о; |
|
|
|
|
|
|
= 0 рад/с |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
И |
|
||
|
|
|
|
|
m = 40 кг; |
|
|
|
|
|
Дl = 0,80 м; |
|
|||
3 |
|
|
|
φ1 = 60о; |
|
||
|
|
|
|
|
0 |
φ0 = 0о; |
|
|
|
|
|
|
= 6,3 рад/с |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
114

|
|
Продолжение табл. 9.1 |
|
|
|
1 |
2 |
3 |
С |
|
|
m = 20 кг; |
|||||
|
и |
|
l = 0,80 м |
|||||
4 |
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
А |
|
|
|
|
|
|
|
б m1 = 30 кг; |
||||||
|
|
|
|
|
m2 = 1,5 кг; |
|||
|
|
|
|
|
r = 0,60 м; |
|||
|
|
|
|
|
R = 0,50 м; |
|||
|
|
|
|
Д |
|
|
|
|
5 |
|
|
|
b = 0,30 м; |
||||
|
|
|
|
|
с = 0,40 м; |
|||
|
|
|
|
|
d = 0,30 м; |
|||
|
|
|
|
|
= 6 рад/с |
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
Ио |
|
|||
|
|
|
|
|
m = 40 кг; |
|||
|
|
|
|
|
R = 0,30 м; |
|||
6 |
|
|
|
φ1 = 30 ; |
||||
|
|
|
φ0 = 0 |
о |
; |
|
||
|
|
|
|
|
|
|
||
|
|
|
|
|
0 = 0 рад/с |
|||
|
|
|
|
|
|
|
|
|
115
|
|
Продолжение табл. 9.1 |
|
|
|
1 |
2 |
3 |
С |
|
m = 20 кг; |
||||
|
|
|
|
|||
|
|
|
|
R = 0,25 м; |
||
|
|
|
|
φ1 = 60о; |
||
7 |
|
|
|
φ0 = 0о; |
||
|
и |
|
ОС = R/2; |
|||
|
|
0 |
= 5,5 рад/с |
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
А |
m = 50 кг; |
|||
|
|
R = 0,30 м; |
||||
|
|
б |
|
М = 4,0 Н·м; |
||
8 |
|
|
t1 = 5 c; |
|||
|
|
|
|
0 |
φ0 = 0о; |
|
|
|
|
|
= 0 рад/с |
||
|
|
|
|
|
|
|
|
|
Д |
|
|||
|
|
|
И |
|||
|
|
|
|
m1 = 20 кг; |
||
|
|
|
|
m2 = 5 кг; |
||
|
|
|
|
r = 0,60 м; |
||
|
|
|
|
R = 0,50 м; |
||
9 |
|
|
b = 0,30 м; |
|||
|
|
|
|
с = 0,25 м; |
||
|
|
|
|
d = 0,30 м; |
||
|
|
|
|
M = 10t Н·м; |
||
|
|
|
|
|
t1 = 2 c |
|
116
|
|
|
|
Продолжение табл. 9.1 |
||
|
|
|
|
|
|
|
1 |
2 |
|
|
3 |
|
|
|
и |
|
|
m1 = 12 кг; |
|
|
|
|
|
m2 = 5 кг; |
|
||
|
|
|
l1 = 0,25 м; |
|
||
|
10 |
|
|
|
b = 0,40 м; |
|
С |
|
|
|
|||
|
|
с = 0,20 м; |
|
|||
|
|
б |
|
= 10 рад/с |
|
|
|
|
|
|
|
||
|
|
|
|
|
||
|
|
А |
m1 = 10 кг; |
|
||
|
|
|
|
|
m2 = 6 кг; |
|
|
|
|
|
|
r = 0,25 м; |
|
|
|
|
Д |
|
||
11 |
|
|
|
b = 0,30 м; |
|
|
|
|
|
|
|
с = 0,40 м; |
|
|
|
|
|
|
d = 0,35 м; |
|
|
|
|
|
|
= 10 рад/с |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
И |
|
|
|
|
|
|
|
m1 = 10 кг; |
|
|
|
|
|
|
m2 = 6 кг; |
|
|
|
|
|
|
R = 0,25 м; |
|
12 |
|
|
|
r = 0,20 м; |
|
|
|
|
|
b = 0,30 м; |
|
||
|
|
|
|
|
|
|
|
|
|
|
|
с = 0,50 м; |
|
|
|
|
|
|
d = 0,35 м; |
|
|
|
|
|
|
= 10 рад/с |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
117

|
|
Продолжение табл. 9.1 |
|
|
|
1 |
2 |
3 |
С |
|
|
|
||
|
и |
|
m1 = 10 кг; |
||
|
|
m2 = 6 кг; |
|||
13 |
|
|
|
b = 0,50 м; |
|
|
|
|
|
|
с = 0,20 м; |
|
|
б |
|
= 10 рад/с |
|
|
|
|
|
||
|
|
|
|
||
|
|
|
А |
|
|
|
|
|
Д |
||
|
|
|
|
|
m = 10 кг; |
14 |
|
|
|
b = 0,80 м; |
|
|
|
|
|
|
с = 0,20 м; |
|
|
|
|
|
= 10 рад/с |
|
|
|
|
|
|
|
|
|
|
И |
|
|
|
|
|
|
m1 = 10 кг; |
|
|
|
|
|
m2 = 20 кг; |
15 |
|
|
|
b = 0,30 м; |
|
|
|
|
с = 0,80 м; |
||
|
|
|
|
|
|
|
|
|
|
|
d = 0,35 м; |
|
|
|
|
|
= 10 рад/с |
|
|
|
|
|
|
118

|
|
Продолжение табл. 9.1 |
|
|
|
1 |
2 |
3 |
С |
|
|
|
m1 = 80 кг; |
|||
|
|
|
|
|
|
m2 = 20 кг; |
|
16 |
|
|
|
|
m3 = 0,4m1; |
||
|
и |
|
|
R3 = 0,10 м; |
|||
|
|
|
М = 100 Н·м |
||||
|
|
|
|
|
|
||
|
|
|
|
|
|
||
|
|
б |
|
m1 = 10 кг; |
|||
|
|
|
А |
m2 = 20 кг; |
|||
|
|
|
|
|
|
m3 = 10 кг; |
|
17 |
|
|
|
|
M = 30 Н·м; |
||
|
|
|
|
R2 = 0,2 м; |
|||
|
|
|
|
|
|
||
|
|
|
|
|
|
b = 0,30 м; |
|
|
|
|
|
|
|
с = 0,80 м |
|
|
|
|
|
Д |
|
||
|
|
|
|
|
|
m = 10 кг; |
|
|
|
|
|
|
|
b = 0,30 м; |
|
18 |
|
|
|
|
с = 0,20 м; |
||
|
|
|
|
|
Иd = 0,35 м; |
||
|
|
|
|
|
|
= 10 рад/с |
|
|
|
|
|
|
|
|
|
119
|
|
Продолжение табл. 9.1 |
|
|
|
1 |
2 |
3 |
С |
|
m = 12 кг; |
||||
|
|
|
|
|||
|
|
|
|
b = 0,30 м; |
||
19 |
|
|
с = 0,25 м; |
|||
|
и |
|
d = 0,35 м; |
|||
|
|
= 8 рад/с |
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
А |
m = 40 кг; |
|||
|
|
б |
|
R = 0,30 м; |
||
|
|
|
M = 3,0 H·м; |
|||
20 |
|
|
OC = R/2; |
|||
|
|
|
|
|
t1 = 4 c; |
|
|
|
|
|
|
φ0 = 0о; |
|
|
|
Д |
||||
|
|
|
|
0 |
= 8 рад/с |
|
|
|
|
|
|
|
|
|
|
|
И |
|||
|
|
|
|
m1 = 100 кг; |
||
|
|
|
|
m2 = 40 кг; |
||
21 |
|
|
m3 = 15 кг; |
|||
|
|
M = 124 H·м; |
||||
|
|
|
|
R2 = 0,2 м; |
||
|
|
|
|
b = 0,30 м |
||
120