

Линеаризация
Теперь
проведём линеаризацию. Пусть
номинальные (установившиеся приdV/dt=dC/dt=0)
значения переменных величин равны![]() .
Подставив их в (П1.4)-(П1.6), получим
алгебраические связи между переменными:
.
Подставив их в (П1.4)-(П1.6), получим
алгебраические связи между переменными:
0=![]() ,(П1.7)
,(П1.7)
0=![]() ,(П1.8)
,(П1.8)
![]() .
(П1.9)
.
(П1.9)
Линеаризация обычно осуществляется в окрестности номинальных значений. Исследуются отклонения от номинальных значений, предполагаемые малыми и допускающими линеаризацию без опасности возникновения значительных ошибок. В нашем примере объем раствора в баке и его концентрация характеризуют текущее состояние объекта. Поэтому в математической модели состояниями являются отклонения объема V(t)-V0=V(t)=ξ1(t) и концентрации
C(t)-C0=C(t)=ξ2(t)
от установившихся значений. Аналогично,
отклонения управлений обозначим μ1(t)
и μ2(t). В результате
можно записать для состояний: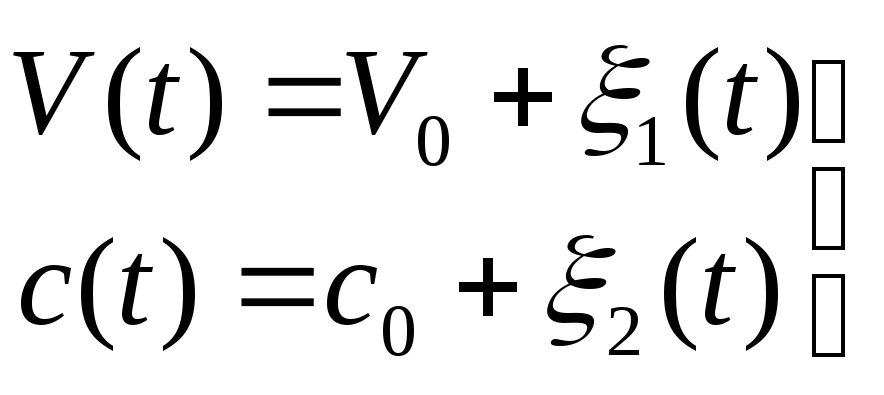 и управлений:
и управлений: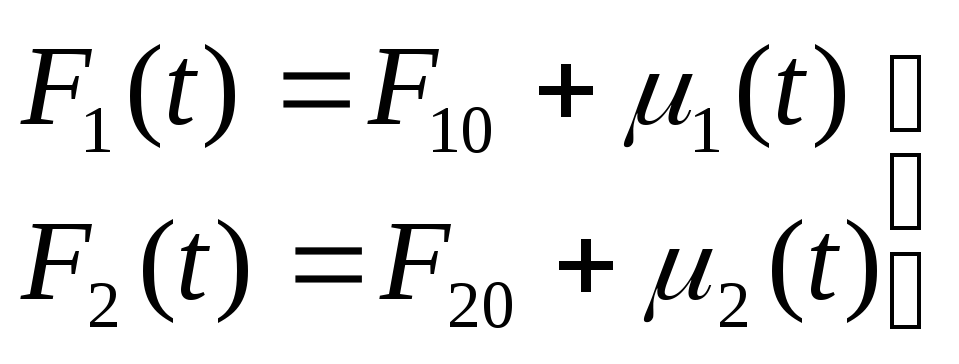 .
.
Для
того, чтобы линеаризовать, разложим все
величины в уравнениях (П1.5), (П1.6) в ряд
Тейлора с удержанием линейных частей
разложения. Кроме произведения
![]() в (П1.6), все переменные входят в уравнения
(П1.5), (П1.6) в первой степени и при
линеаризации сохраняют структуру. Для
в (П1.6), все переменные входят в уравнения
(П1.5), (П1.6) в первой степени и при
линеаризации сохраняют структуру. Для![]() линейная часть разложения получается,
следуя(3.2), в виде:
линейная часть разложения получается,
следуя(3.2), в виде:
![]() ,
(П1.10)
,
(П1.10)
![]() .
(П1.11)
.
(П1.11)
2.1.2.4. Линейная модель объекта
Заменив
в соответствии с (П1.9)
![]() на
на![]() ,
а затем, подставив (П1.10) в (П1.11) и обозначив
,
а затем, подставив (П1.10) в (П1.11) и обозначив![]() (время заполнения бака), получим два
линейных дифференциальных уравнения,
которые в векторно-матричной форме
имеют вид:
(время заполнения бака), получим два
линейных дифференциальных уравнения,
которые в векторно-матричной форме
имеют вид:
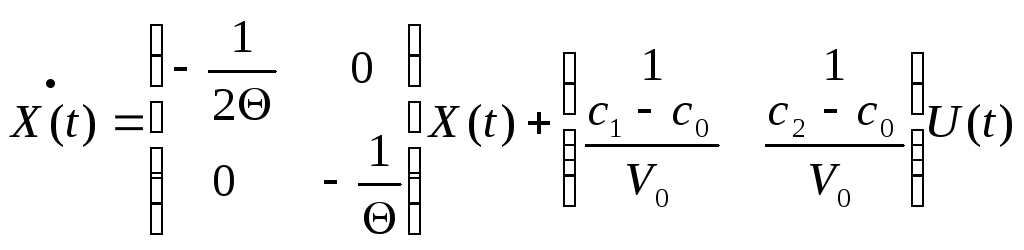 ,
(П1.12)
,
(П1.12)
где
X(t)- вектор состоянийX(t)=![]() ;
;
U(t)– вектор управленийU(t) =μ() = (μ1(t), μ2(t))T.
Выходы объекта – отклонения расхода и концентрации раствора:
![]() ,
(П1.13)
,
(П1.13)
![]() ,
(П1.14)
,
(П1.14)
Уравнение для выходов в матричной форме:
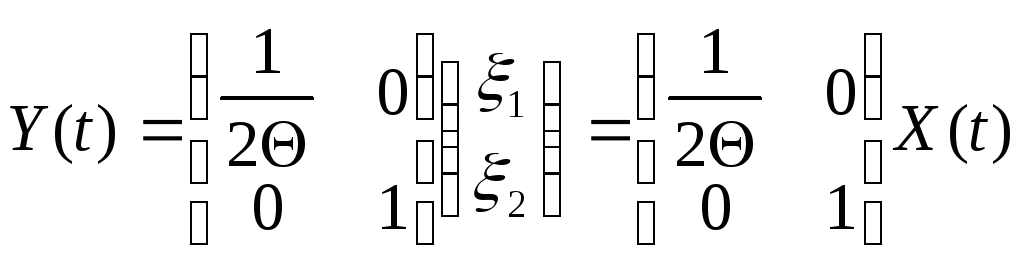 .
(П1.15)
.
(П1.15)
Пусть
установившиеся значения численно равны
![]()
![]() ,
,![]() ,
,![]() ,
,![]() ,
,
![]() .
.
Подставив эти значения, получим:
![]() ,
(П1.16)
,
(П1.16)
![]() .
(П1.17)
.
(П1.17)
Данная
система стационарная, следовательно,
её фундаментальная матрица имеет вид
![]() и
вычисляется следующим образом: т.к.
и
вычисляется следующим образом: т.к.
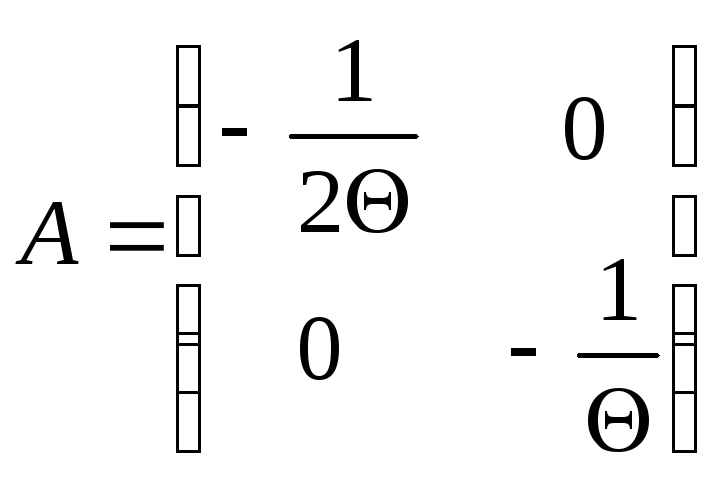 , то получаем
, то получаем
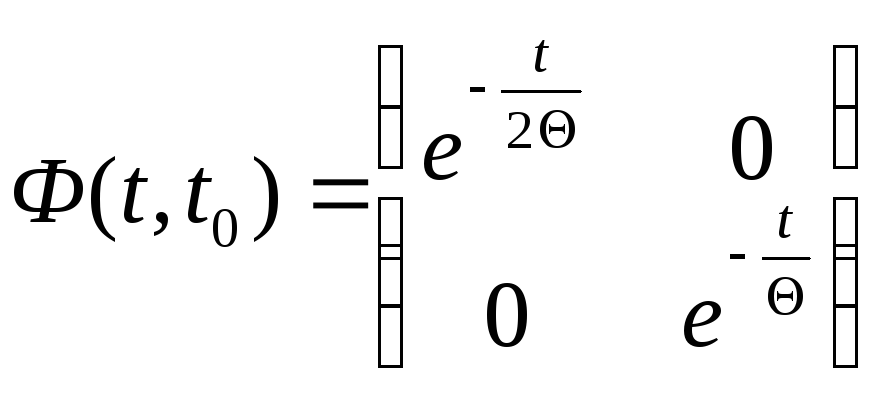 , (П1.18)
, (П1.18)
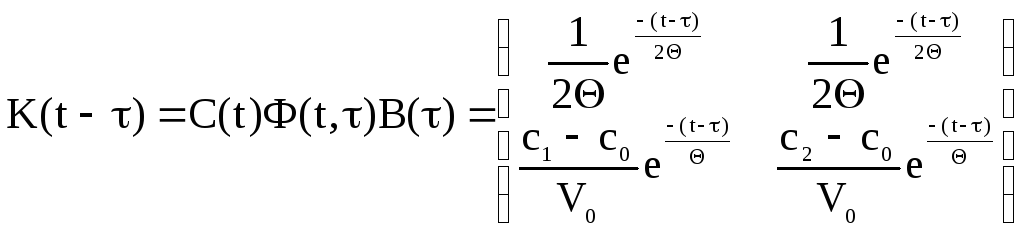 ,
(П1.19)
,
(П1.19)
 .
(П1.20)
.
(П1.20)![]()
2.2. Временные характеристики систем управления (Лекция 4)
2.2.1. Линейные нестационарные системы
2.2.1.1. Общий вид описания системы
В качестве примера будут использоваться наиболее простые линейные системы.
Их движение описывается дифференциальными уравнениями вида (1.9)
![]() =
A(t)x(t) + B(t)w(t), t³t0
,
(2.4)
=
A(t)x(t) + B(t)w(t), t³t0
,
(2.4)
где x(t)-n-мерный вектор состояния,
w(t) – L-мерный вектор входных воздействий,
A(t), B(t) – функциональные матрицы, соответствующих размеров; их
элементы – функции времени.
В общем случае кроме состояний x(t), имеются выходные величины, которые могут являться алгебраической функцией состояний. Обозначим их векторy(t)и запишем в общем виде:
y(t) = C(t)x(t) , t³t0. (2.5)
Для того, чтобы выяснить поведение объекта, надо решить (2.4), то есть найти x(t). Это неоднородное дифференциальное уравнение. Его решение состоит из общего решения однородного и частного решения неоднородного уравнения.