

3.2. Управление и стабилизация (Лекция 11)
3.2.1. Цель управления, идеальное управление
3.2.1.1. Общая схема разомкнутого и замкнутого управления
Общую схему объекта и системы управления можно представить в виде
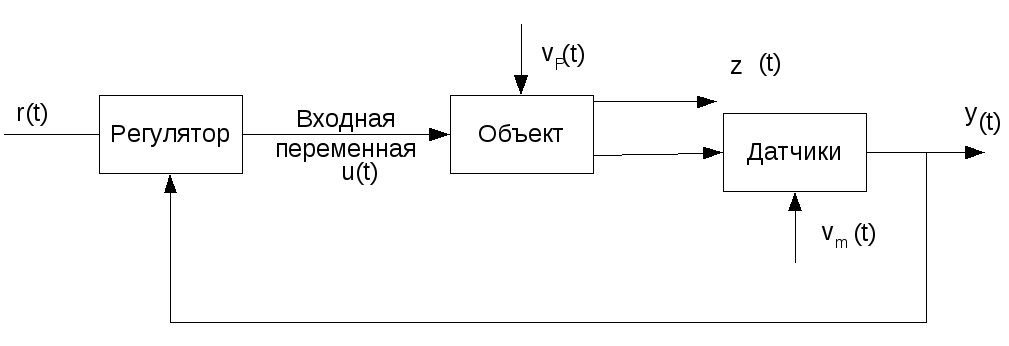
Рис.3.3. Схема объекта с замкнутым регулятором.
r(t) – эталонная переменная (заданное, желаемое значение управляемой переменнойz),y(t) – наблюдаемая переменная,vP(t) – возмущающая переменная,vm(t) - шум наблюдений,u(t) – управление(управляющая переменная).
Цель управления.
Целью управления является максимально точное выполнение условия:
z(t)r(t),tt0(3.11)
Разомкнутыйрегулятор имеет место, еслиy(t) не подаётся в регулятор
u(t) =fp[r(),t0t],tt0(3.12)
Если выходная переменная измеряется(наблюдается), её значение целесообразно использовать при определении управления.
Замкнутыйрегуляторu(t) =fз[r(),t0t;y(),t0t],tt0(3.13)
Объект + регулятор = система управления.
Будем считать y(t) = z(t), т.е. мы наблюдаем именно управляемую переменную, r(t) - заданное значение выходной переменной.
Если необходимо обеспечить, чтобы y(t)r(t),tt0, гдеr(t) изменяемое во времени значение входной величины, то имеет место задачаслежения.
Если входная величина является постоянной r(t) =r0tt0, то имеет место задача регулирования, стабилизации.
3.2.1.2. Идеальное управление
Пусть (t) = y(t) - r(t), (3.14)
где (t) – ошибка слежения.
В случае
(t) = 0tt0(3.15)
управление идеальное. В этом случае говорят, что система инвариантна по отношению к действующим возмущениям. Пусть объект описывается линейными дифференциальными уравнениями. Воспользуемся для краткости записи дифференциальных уравнений оператором дифференцирования, введенным в п.п. 2.3.1.1. , т.е. запишем их в виде (2.20). Так как мы будем определять управление, то разделим на две составляющие вектор w(t) = [u(t),v(t)], а именно на управлениеu(t) и возмущениеv(t). Тогда уравнения для состояний и для выходных переменных системы можно записать в виде
![]()
y(t) =(D)x(t)
Подставляя 1-е во 2-е, находим для выходной (управляемой) переменной выражение
(D)y(t) =(D)u(t) +(D)v(t), (3.16)
где
,,- многочлены от
оператора дифференцирования, которые
выражаются через![]() ,
,![]() ,
,![]() ,.
,.
Подставим (3.14) в (3.16):
(D)[r(t) +(t)] =(D)u(t) +(D)v(t),
отсюда ошибка
(D)(t) =(D)u(t) +(D)v(t) -(D)r(t). (3.17)
Предположим, что:
1) имеют место нулевые начальные условия для ошибки и всех её производных
(t), ’(t),’’(t),...,(n-1)= 0, n - степень;
2) многочлены ,,и значения г(t), v(t), t0 известны точно.
Тогда из (3.17) в соответствии с (3.15) можно определить инвариантное управление
(D)u(t) =(D)r(t) -(D)v(t) (3.18)
Подставляя управление (3.18) в (3.17) можно убедиться, что ошибка будет равна нулю
(D) (t) = 0. (3.19)
Идеальное управление особенно просто получить, если (D) =0=const. В этом случае непосредственно из (3.18) следует управление
u(t) =0-1((D)r(t) -(D)v(t)) (3.20)