

3. Методы анализа и синтеза управления.
3.1. Методы анализа управления (Лекция 10)
3.1.1. Управляемость, наблюдаемость.
3.1.1.1. Управляемость: определение (Пример 3.1)
Управляемость.Определение. Линейная дифференциальная система
![]() (3.1)
(3.1)
является
полностью управляемой тогда и только
тогда, когда она может быть переведена
из любого начального состояния
![]() в начальный момент времени
в начальный момент времени![]() в любое конечное состояние
в любое конечное состояние![]() за конечное время
за конечное время![]() -
-![]() .
.
Теорема.n-мерная линейная система с постоянными параметрами
![]() (3.2)
(3.2)
является полностью управляемой тогда и только тогда, когда вектор-столбец матрицы управляемости
![]() (3.3)
(3.3)
порождает n-мерное пространство (имеет рангn).
Говорят пара {A,B} является полностью управляемой.
![]() Пример 3.1.
Проверить управляемость смесительного
бака, модель которого получена в
предыдущих примерах.
Пример 3.1.
Проверить управляемость смесительного
бака, модель которого получена в
предыдущих примерах.


Если
С![]() =С
=С![]() ,
тоrangP=1
и система неуправляема; если С
,
тоrangP=1
и система неуправляема; если С![]()
![]() С
С![]() ,
тоrangP=2
и система управляема.
,
тоrangP=2
и система управляема.![]()
3.1.1.2. Наблюдаемость: определение (Пример 3.2)
Наблюдаемость(восстанавливаемость) означает для
системы (3.2), что по измерению выходной
у(t) и входнойu(t),![]()
![]()
![]() можно определить начальное состояние
системы
можно определить начальное состояние
системы![]() для любого
для любого![]() .
Т.е. можно определить состояние в момент
.
Т.е. можно определить состояние в момент![]() по будущим управлениям или восстановить
настоящее состояние по прошлым.
по будущим управлениям или восстановить
настоящее состояние по прошлым.
Теорема. Система (3.2)n-мерная является полностью восстановимой в том и только в том случае, если вектор-строка матрицы восстанавливаемостиQпорождаетn-мерное пространство(rangn)
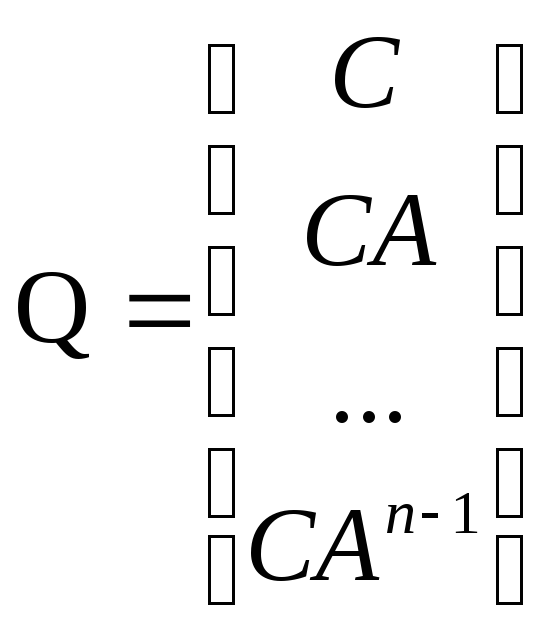 (3.4)
(3.4)
![]() Пример 3.2.
Смесительный бак.
Пример 3.2.
Смесительный бак.


rangQ=2.
![]()
3.1.2. Корневой годограф
3.1.2.1. Определение корневого годографа
Анализ систем управления включает исследование устойчивости, качества, т.е. степени удовлетворения заданных характеристик качества, исследование динамической точности систем. Последнее особенно важно для следящих систем, в которых задающее воздействие - величина переменная во времени. Мы вкратце познакомимся с этими вопросами.
Основной принцип проектирования систем состоит в том, что система должна быть устойчивой.
Анализ устойчивости занимает исключительное положение. Кроме выяснения вопроса об устойчивости необходимо определить диапазоны варьирования параметров, в которых устойчивость сохраняется.
Чтобы быстро проследить поведение системы целесообразно использовать не точные вычисления, требующие много времени даже при использовании ЭВМ, а приближенные методы. Один из них метод корневого годографа.
Характеристическое уравнение замкнутой системы можно представить в виде
1 + H(р) = 1 + K (р)/(р) =(р) + K(р) = 0 (3.5)
Совокупность точек рi, удовлетворяющих уравнению (3.5) при различных К, образует корневой годограф системы.
Таким образом, корневой годограф это геометрическое место точек – значений корней характеристического уравнения системы при изменении скалярного параметра от 0 до бесконечности. В качестве скалярного параметра часто выступает неизвестный вначале коэффициент усиления. Передаточная функция замкнутой системы для соединения с обратной связью, равна
Hз(p) =Hp(p) / [1 +Hp(p)Hoc(p)]
Её можно представить в виде (3.5)
(p) + (p) (3.6)
где ,- полиномы от, а- параметр. Полиномы можно представить в виде
(p) = i (p - i) , i=1,2,...,n; (p) = i(p - i), i=1,2,..,m (3.7)
где i – обозначает произведение поi;i , i=1,2,..,n - полюса разомкнутого контура, аi, i=1,2,...,m - его нули.
Корни (3.6) называют полюсами замкнутого контура. Пусть m n, в обратном случае можно поменять местами,и выбрать параметр 1/.