

2.4.2.3. Асимптотические логарифмические частотные характеристики
Формулы (2.41), (2.42) достаточно сложны, но анализ показывает возможность их приближенного использования, учитывая близость к ломаной. Действительно, один член из (2.41) L (q) =20lg | (Tmw)2+1|1/2 при различных отношениях частоты и постоянных времени может быть представлен разными значениями:
при w<<1/T, Tw<1, (Tw)2<<1 и L(θ)@0,
при w>1/T, Tw>1, (Tw)2>>1 и L(θ)@20lg (Tmw).
Отсюда определение: асимптотической ЛАХ , соответствующей Н(р) вида (2.40), называется кусочно-линейная функция, получаемая заменой (2.41) асимптотическими ломаными вида:
![]() (2.43)
(2.43)
где w =1/T - сопрягающая частота, w<1/T- низкочастотная асимптота, w>1/T - высокочастотная асимптота.
Асимптотическая ЛФХ есть кусочно-постоянная функция, получающаяся из (2.42) заменой
![]() (2.44)
(2.44)
Замечательное свойство асимптотических характеристик в том, что они строятся практически без вычислений по следующему алгоритму:
1) Строится низкочастотная асимптота Lнч(q) = 20lg k + 20 nq
Упорядочиваются все постоянные времени (частоты)
T1 > T2 > ..... > Tn , w1 = 1/T1 < w2 = 1/T2 < .....< wn =1/Tn
3) Положить Lас(q) = Lнч(q) вплоть до w1
4) Если Т1принадлежит числителю, то начиная с w=w1проводится прямая с наклоном на
20 дБ/дек больше, если знаменателю, то меньше;
5) Продолжаем до w2и переходим на п.4.
2.4.2.4. Иллюстрация построения асимптотических характеристик (Пример 2.6)
![]() Пример
П.2.6.: Определить
асимптотические логарифмические
характеристики, если передаточная
функция имеет вид
Пример
П.2.6.: Определить
асимптотические логарифмические
характеристики, если передаточная
функция имеет вид
Н(р) = k/p[(T2p + 1)/(T1p + 1)(T3 p + 1)], T1 > T2 >T3
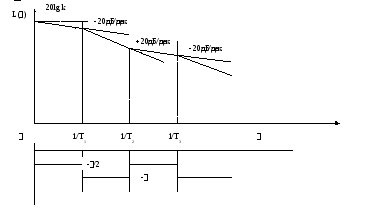
Рис.2.3. Асимптотические амплитудная а) и фазовая б) логарифмические частотные характеристики.
![]()
2.5. Структурные схемы систем (Лекция 7)
2.5.1. Схемы соединения звеньев
2.5.1.1. Представление звеньев и связей в виде структурных схем
Структурные схемы дают наглядное, графическое представление структуры объекта или системы. В них отдельные звенья (подсистемы) изображаются прямоугольниками, в которых могут указываться передаточные функции. Соединения звеньев отражаются стрелками одинарными для скалярных и двойными для векторных величин.
а) б)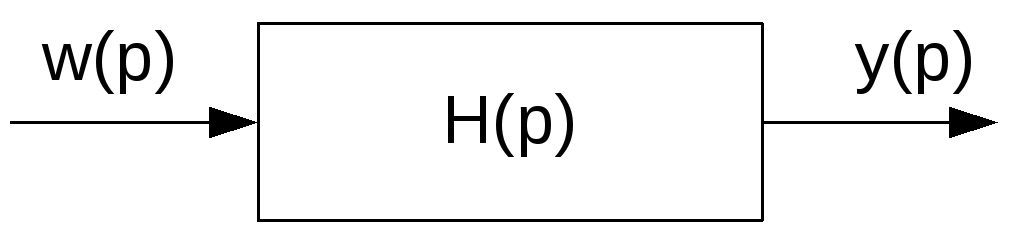

Рис.2.4. Представление звена: а – скалярный вход – выход, б – векторный вход – выход.
В операторном виде с учетом (2.20) уравнения системы можно записать в виде
A(p) X(p) = B(p) W(p) (2.45)
Y(p) = C(p) X(p) (2.46)
где X(p) - изображение по Лапласу переменной состояния,W(p) - входной иY(p) - выходной переменных.
A(p) @ an pn + an-1pn-1 + .... + a1p + a0- многочлен от переменной р,
B(p),C(p) - аналогичные многочлены; (2.45) есть результат преобразования по Лапласу (2.17).
Из (2.45),(2.46) получаем
Y(p) = [C(p)B(p) /A(p)]W(p) (2.47)
Y(p) = H(p) W(p), H(p) = C(p) B(p) / A(p) (2.48)
Пусть система состоит из i = 1,2,...,n звеньев (подсистем)
Yi(p) = Hi(p) Wi(p), i =1,2,...,n. (2.49)
Связи между ними задаются в виде:
Wi(p)
=
![]() ,(2.50)
,(2.50)
где, Wi' - внешние связи.
Для состояний уравнения получаются непосредственно из (2.45) Все состояния, обозначенные Xi(p),i= 1,2,...,nобразуют вектор состояний системы. Выходы, не являющиеся входами других элементов данной системы, есть выходы системы. Входы элементов системы, не являющиеся выходами других элементов этой системы являются внешними входами. Входы и выходы могут быть как векторными, так и скалярными.
В общем случае система состоит из множества элементов, соединенных между собой. Для анализа целесообразно эти элементы выделить в качестве отдельных звеньев, а потом объединить в одну систему. При всем кажущемся разнообразии соединений, фактически имеют место только 3 возможные схемы соединения элементов или звеньев. Ниже они рассматриваются для случая, когда число элементов равно 2.