

2.5.1.2. Последовательное соединение звеньев
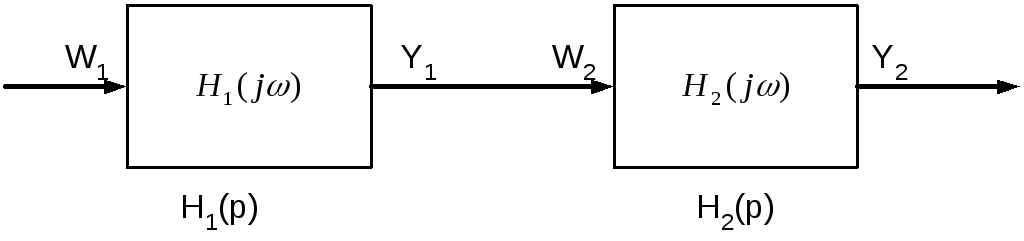
Рис. 2.5. Последовательное соединение звеньев
W1=W ' , W2=Y1 , Y2=Y , Y1(p)=H1(p)W1(p), Y2(p)=H2(p)W2(p),
Объединяя звенья в соответствии со связями, получим передаточную функцию соединения:
Y(p)= Y2(p)=H2(p)W2(p)= Y2(p)=H2(p) H1(p)W1(p),
H(p)= H2(p) H1(p),
Подставляя p=jw, получаем частотную передаточную функцию и характеристики:
H(jw) = H2(jw ) H1(jw ) , | H(jw)| = |H2(jw )| |H1(jw )|,
arg H(jw) =arg H2(jw ) + arg H1(jw )
Векторно-матричное представление и характеристическое уравнение соединения можно получить следующим образом:
A1(p) Y1(p) = C1(p) B1(p) W1(p), A2(p) Y2(p) = C2(p) B2(p) W2(p), W2(p)=Y1(p)
![]() *
*![]() =
=![]() *W1(p),
*W1(p),
![]()
det A = A1(p)A2(p),
2.5.1.3. Параллельное соединение
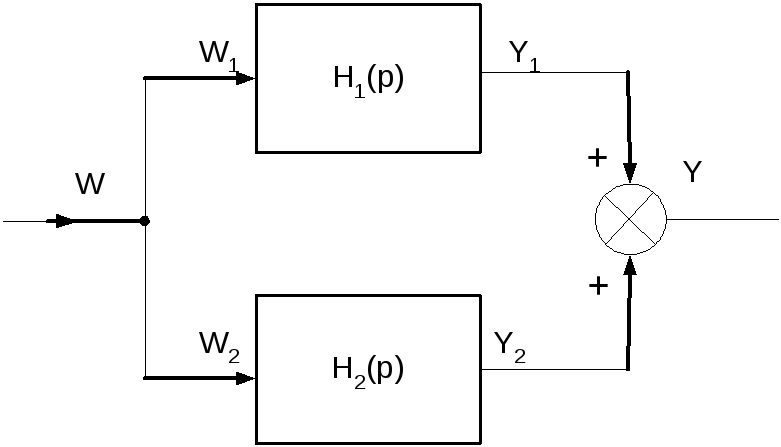
Рис.2.6. Параллельное соединение звеньев
Y1(p)=H1(p) W(p), Y2 (p)= H2 (p)W(p), Y1(p)+Y2(p)=Y(p),
Y(p)=Y1(p)+Y2(p)=H1(p)W(p)+H2(p)W(p)=[H1(p)+H2(p)]W(p),
H(p) = H1(p)+H2(p),
H(jw) = H2(jw ) + H1(jw ),
R(H) =R(H1) + R(H2),
I(H) = I(H1) + I(H2),
Векторно-матричная запись с использованием операторного представления может быть получена следующим образом:
A1(р)Y1(р) = C1(р)B1(р)W(р),
A2(р)Y2(р)= C2(р)B2(р)W(р),
![]() *
*![]() =
= *W(p)
*W(p)
![]() ,
det A = A1(p)A2(p)
,
det A = A1(p)A2(p)
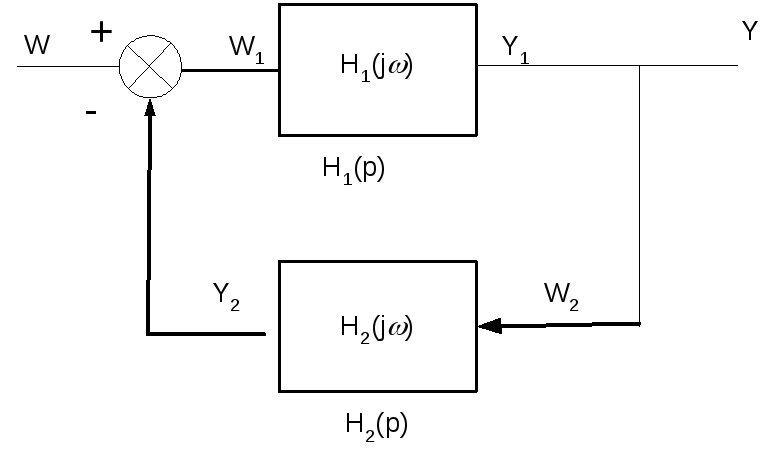
2.5.1.4. Соединение с обратной связью
Р
} (*)
A1(p)Y1(p)= C1(p)B1(p) W1(p),
A2(p)Y2(p) = C2(p)B2(p)W2(p) ,
Y(p)=Y1(p), W2(p)=Y1(p), W1(p)=W(p)-Y2(p); (**)
H1(p)=A1-1(p)C1(p)B1(p) ,
H2(p)=A2-1(p)C2(p)B2(p).
Представление системы в векторно-матричной форме возможно даже, если сигналы скалярные. Оно имеет вид:
![]() Y=
Y=![]() W
W
Характеристическое уравнение системы зависит от звена обратной связи, изменением характеристик которого можно влиять на характер поведения, устойчивость и вид переходных процессов.
det A = A1(p)A2(p) + C1(p)B1(p)C2(p)B2(p)
Передаточная функция получается из передаточных функций звеньев (*) с использованием связей (**).
Y(p) = Y1(p) = H1(p)W1(p) = H1(p) (W(p) - Y2(p)) = H1(p) (W(p) - H2(p)W2(p)) = H1(p)W(p) -H1(p)H2(p)Y(p);
Y(p) = [H1(p) / (1 + H1(p)H2(p))]W(p), (***)
H(p) =[H1(p) / (1 + H1(p)H2(p))].
Если H2 =1, то обратная связь называется жесткой. Если W1(p)=W(p)+Y2(p), то обратная связь называется положительной, если W1(p)=W(p)-Y2(p), то отрицательной. Система с обратной связью может быть разомкнутой. В этом случае H(p)=H1(p)H2(p).
Если входные и выходные величины – векторы, то вместо скалярных передаточных функций будут матрицы: H1(p) и H2(p). В этом случае выражение для выходной величины (***) будет иметь вид:
Y(p) = [1 + H1(p)H2(p)]-1H1(p)W(p),
и передаточная функция определяется посредством перемножения и обращения матриц
H(p) =[1 + H1(p)H2(p)]-1H1(p).
Произведение матриц L(p) = H1(p)H2(p) называется матрицей усиления контура, а матричная функция в скобке J(p) = 1 + L(p) называется матрицей возвратной разности.
2.5.1.5. Пример определения матрицы возвратной разности (Пример 2.7)
![]() Вернемся к примеру
2.1 со смесительным баком. Там под номером
(П2.5) приведена матричная передаточная
функция системы по каналу вход – выход.
Пока оставим в стороне вопрос выбора
вида обратной связи. Примем, что матрица
обратной связи имеет вид:
Вернемся к примеру
2.1 со смесительным баком. Там под номером
(П2.5) приведена матричная передаточная
функция системы по каналу вход – выход.
Пока оставим в стороне вопрос выбора
вида обратной связи. Примем, что матрица
обратной связи имеет вид:
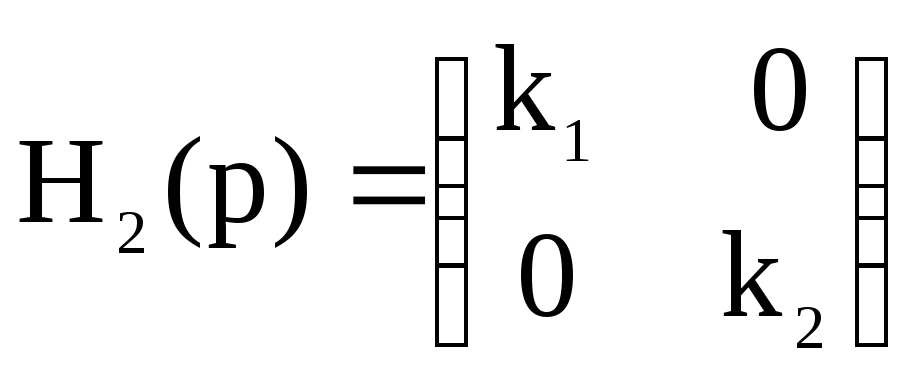 .
Матричная передаточная функция (П2.5)
имеет вид:
.
Матричная передаточная функция (П2.5)
имеет вид: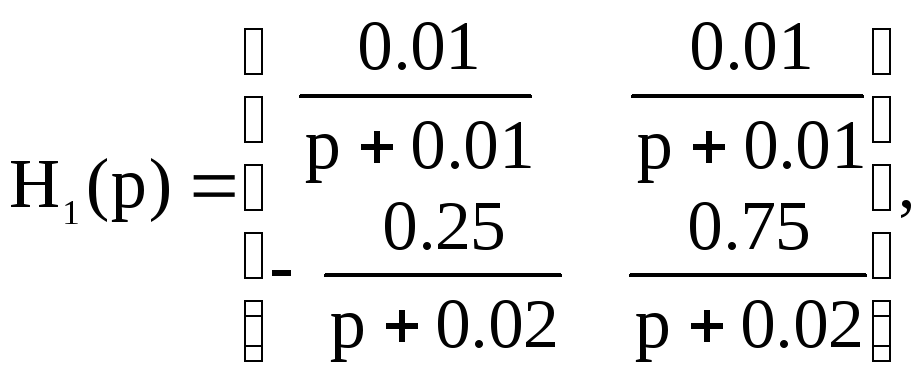 так что матрица усиления контура в
данном случае будет равна:
так что матрица усиления контура в
данном случае будет равна: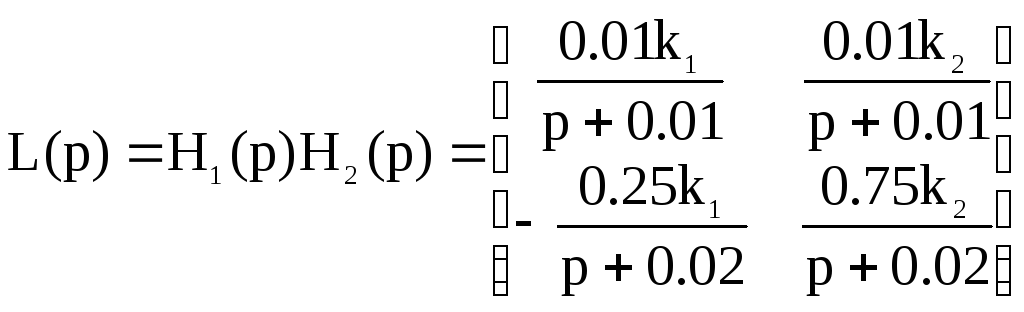 ,
,
а матрица возвратной разности имеет вид:
J(р)
=I+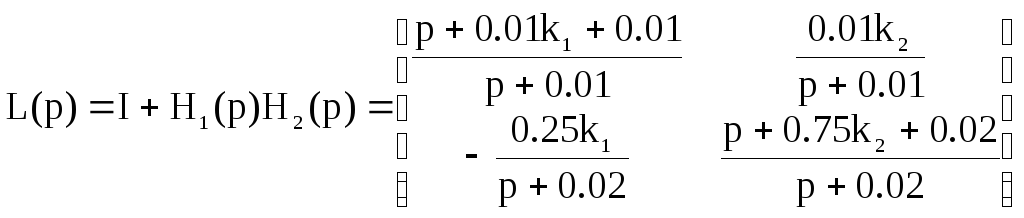 .
.![]()