

10. Расчет и построение искусственных статических х-к днв при изменении напряжения питания якоря. Совокупность х-к. Область применения.
Естественной называется характеристика двигателя ω = f(i) (ω = f(M)), которая получена при номинальных значениях напряжения и магнитного потока двигателя, а так же при отсутствии дополнительных резисторов в цепи якоря.
 ,
,
 .
.
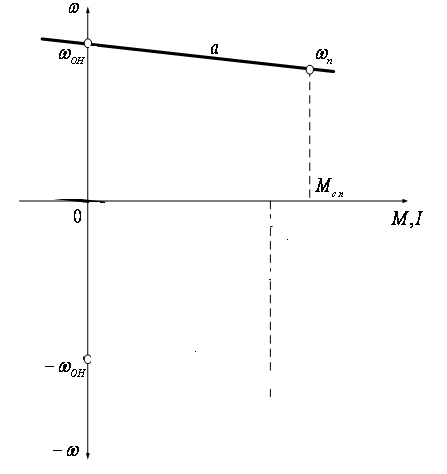
Из уравнений видно, что изменяется скорость хх, а статический перепад остается неизменным
 ,
,
 ,
,

Очевидно, что графики будут паралелльны.
Расчетное значение
скорости ХХ определяется

Преимущества: любая машина выдерживает регулирование вниз; нет резисторов; быстродействие; графики параллельные, обладают достаточной жесткостью. Недостаток питание от автономного источника.
11. Графічний розрахунок опорів додаткового резистора для пуску днз.
Схема включения двигателя для пуска резисторного ЭП приведена ниже.
С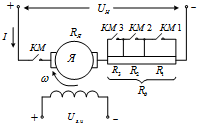 начала
замыкается контакт контактора КМ, потом
через определенные интервалы времени
контакты КМ1, КМ2, КМ3 контакторов
ускорения. В результате добавочный
резистор
является зашунтированным, и двигатель
продолжает работать на природной
статической характеристике. Для
построения характеристик принимается,
что ток и момент двигателя изменяются
в пределах от
начала
замыкается контакт контактора КМ, потом
через определенные интервалы времени
контакты КМ1, КМ2, КМ3 контакторов
ускорения. В результате добавочный
резистор
является зашунтированным, и двигатель
продолжает работать на природной
статической характеристике. Для
построения характеристик принимается,
что ток и момент двигателя изменяются
в пределах от до
до
 і от
і от
 до
до
 .
.
В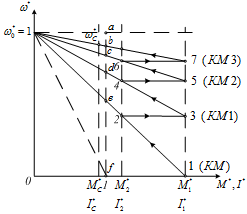 соответствии с характеристикой 1-2
двигатель
увеличивает свою угловую скорость до
точки 2, дальше шунтируется первая секция
резистора (замыкание КМ1). Скорость
двигателя, из-за инерционности ЭП, а
момент, если пренебречь индуктивностью
якоря, увеличивается моментально, то
переход на новую характеристику
происходит по линии 2-3, параллельно оси
абсцисс. Остальные переходы аналогичны.
соответствии с характеристикой 1-2
двигатель
увеличивает свою угловую скорость до
точки 2, дальше шунтируется первая секция
резистора (замыкание КМ1). Скорость
двигателя, из-за инерционности ЭП, а
момент, если пренебречь индуктивностью
якоря, увеличивается моментально, то
переход на новую характеристику
происходит по линии 2-3, параллельно оси
абсцисс. Остальные переходы аналогичны.
После замыкания
контакта КМ№ двигатель перейдет на
природную характеристику и в окончании
пуска его скорость будет составлять
 .
.
Уравнение
механической характеристики в
относительных единицах
 ,
де
,
де
 – относительный перепад скорости.
– относительный перепад скорости.
При
 =const
перепад скорости пропорционален
сопротивлению якорной цепи. При
=1
(номинальный момент) относительный
перепад скорости
=const
перепад скорости пропорционален
сопротивлению якорной цепи. При
=1
(номинальный момент) относительный
перепад скорости
 .
.
По последнему
выражению, вертикальне отрезки на линии,
проведенной через точку
=1,
между
горизонтальной линией
 =1
и характеристиками
двигателя соответствуют отдельным
ступеням сопротивления якоря: ордината
af
в относительных единицях равняется
номинальному сопротивлению, ординаты
ae,
ad,
ac,
ab
– сопротивлениям соответственно для
1…4 ступеней пуска. Если для указанных
относительных величин посчитать
внутреннее сопротивление двигателя
=1
и характеристиками
двигателя соответствуют отдельным
ступеням сопротивления якоря: ордината
af
в относительных единицях равняется
номинальному сопротивлению, ординаты
ae,
ad,
ac,
ab
– сопротивлениям соответственно для
1…4 ступеней пуска. Если для указанных
относительных величин посчитать
внутреннее сопротивление двигателя
 (ab),
то получаются относительные сопротивления
отдельных ступеней пускового реостата
(be,
bd
и bc).
(ab),
то получаются относительные сопротивления
отдельных ступеней пускового реостата
(be,
bd
и bc).
 ;
;
 ;
;
 .
.
13. Признаки и энергетика двигательного режима днв на примере подъема груза. Соответствующие статические х-ки.
Д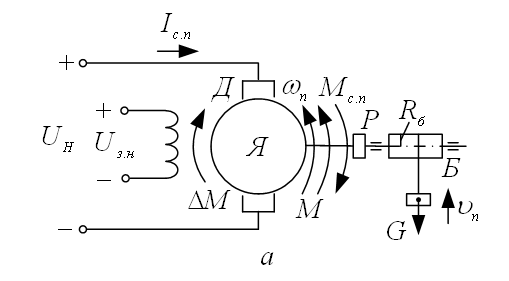 ля
подъема груза G
со скоростью
υ двигатель включается по сх а.
Двигатель работает в двигательном
режиме со скоростью
ля
подъема груза G
со скоростью
υ двигатель включается по сх а.
Двигатель работает в двигательном
режиме со скоростью
 .
Признак: уменьшение модуля скорости ω
при увеличении модуля нагрузки
М, I .
.
Признак: уменьшение модуля скорости ω
при увеличении модуля нагрузки
М, I .
Уравнения электрического равновесия для якорной цепи
 ,
(2.28)
,
(2.28)

 – статический ток
при подъеме груза,
– статический ток
при подъеме груза,
 .
.
У
подъем
множив уравнение (2.28) на , получим баланс мощности в двигательном режиме: ,
(2.29)
,
(2.29)
U
опускание
нIн = ,
мощность, потребляемая двигателем из
сети,
,
мощность, потребляемая двигателем из
сети,
En * Iст =  ,
мощность, отдаваемая якорем двигателя
механізму
,
мощность, отдаваемая якорем двигателя
механізму
Статические режимы роботы электропривода подъемного механизма
I2c.n.Rя =
 тепловые потери
тепловые потери
 ,
(2.30)
,
(2.30)
Признак: скорость меньше скорости ХХ. С увеличением скорости момент падает (по модулю)