

6.22.2. Изменение частоты вращения двигателя изменением частоты сети
Этот метод изменения скорости вращения возможен только в том случае, когда имеется специальный преобразователь, позволяющий получать трехфазное напряжение регулируемой частоты. Эту роль может выполнить синхронный генератор с изменяющейся скоростью вращения. В настоящее время широко используются статические полупроводниковые преобразователи частоты.
При питании асинхронного двигателя от источника переменного тока регулируемой частоты необходимо учитывать то, что электромеханические параметры двигателя будут различными на разных частотах (рис. 6.53).
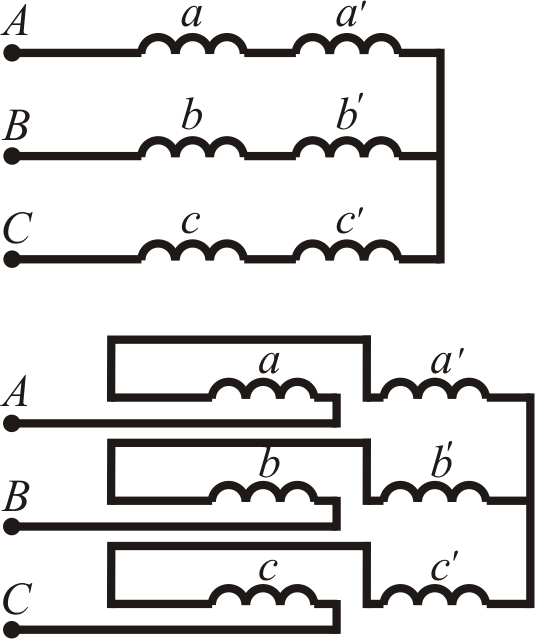
Рис. 6.53
Величина критического скольжения механической характеристики
![]()
при уменьшении частоты увеличивается. Максимальный момент в соответствии с формулой

также увеличивается с уменьшением частоты. Аналогично изменяется и величина пускового момента. Изменение вида механической характеристики при изменении частоты питающего напряжения должно учитываться в системах частотного управления асинхронным двигателем. С изменением частоты изменяются и рабочие характеристики двигателей, так как при уменьшении частоты увеличивается ток холостого хода двигателя, сопровождающийся увеличением магнитного потока при неизменном напряжении питания. Все изменения приводят к необходимости одновременного изменения частоты сети и питающего напряжения.
Взаимозависимость напряжения и частоты сети определяются реальными условиями работы двигателя. При постоянном моменте нагрузки желательно сохранить неизменным значение максимального момента, развиваемого двигателем, т. е. не зависящим от частоты питающей сети. Но как следует из ранее приведенной формулы
или
![]() ;
;
![]() .
.
Откуда следует, что для поддержания максимального момента механической характеристики необходимо напряжение сети изменять пропорционально ее частоте. Например, при управлении двигателем, рассчитанным для работы от сети 380 В, 50 Гц при уменьшении частоты питающей сети в два раза (25 Гц), напряжение сети должно быть равным 190 В.
Если по условиям эксплуатации при изменении частоты вращения должна оставаться неизменной мощность на валу двигателя, т. е.
![]()
или
![]() ,
,
то напряжение и частота сети должны быть связаны между собой соотношением
![]() ,
,
где напряжение сети при частоте ;
напряжение сети при частоте .
6.22.3. Регулирование частоты вращения ротора асинхронных двигателей изменением сопротивления роторной цепи
Рис. 6.54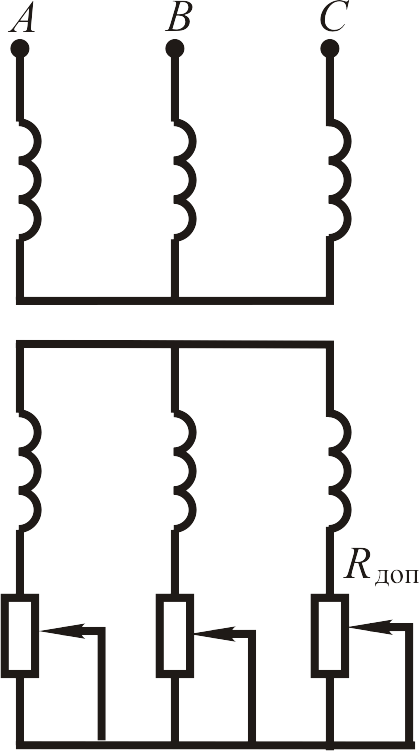
Этот способ регулирования скорости заключается в введении сопротивления в цепь ротора (рис. 6.54). Ранее мы уже видели, что увеличение сопротивления роторной цепи увеличивает критическое скольжение. Если момент сопротивления на оси двигателя неизменный и если увеличить сопротивление роторной цепи, скольжение увеличится и скорость вращения пропорционально уменьшится.
Рис. 6.55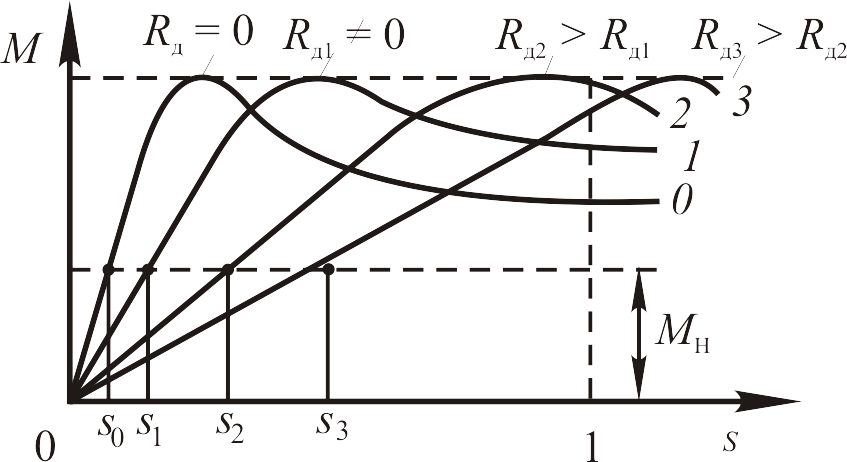
![]() в цепи ротора равняется нулю, то при
моменте нагрузки
в цепи ротора равняется нулю, то при
моменте нагрузки
![]() скольжение в соответствии с механической
характеристикой 0 равно
скольжение в соответствии с механической
характеристикой 0 равно
![]() .
Если сопротивление реостата не равно
нулю (характеристика 1),
угол наклона прямолинейной части
механической характеристики уменьшится
и двигатель обеспечит устойчивую работу
при скольжении
,
т. е. при меньшей частоте вращения ротора.
При дальнейшем увеличении сопротивления
дополнительного трехфазного реостата
частота вращения будет уменьшаться.
При больших сопротивлениях реостата
работа двигателя становится менее
устойчивой, так как даже малое изменение
момента на валу двигателя приводит к
значительному изменению частоты
вращения.
.
Если сопротивление реостата не равно
нулю (характеристика 1),
угол наклона прямолинейной части
механической характеристики уменьшится
и двигатель обеспечит устойчивую работу
при скольжении
,
т. е. при меньшей частоте вращения ротора.
При дальнейшем увеличении сопротивления
дополнительного трехфазного реостата
частота вращения будет уменьшаться.
При больших сопротивлениях реостата
работа двигателя становится менее
устойчивой, так как даже малое изменение
момента на валу двигателя приводит к
значительному изменению частоты
вращения.
Таким способом можно изменить частоту ротора в пределах от номинального скольжения и до полной остановки двигателя. Этот способ регулирования скорости неэффективен, так как связан с большими потерями электрической энергии. Механическая мощность уменьшается пропорционально уменьшению частоты вращения ротора при постоянном механическом моменте, и в то же время потери в дополнительном сопротивлении ротора увеличиваются пропорционально.
Скорость вращения может быть изменена изменением напряжения питания, но этот метод регулирования используют очень редко, так как область устойчивого регулирования очень ограничена.