

§ 2.12. Геометрическая форма представления сигналов
В
соответствии с обобщенной теорией
сигналов при выбранной совокупности
ортонормированных функций k(I![]() k
k![]() N)сигнал
u(t)
на
ограниченном интервале времени Т
полностью определяется совокупностью
безразмерных коэффициентов C1,
..., Ck,
...,
CN.
Эти
коэффициенты можно рассматривать как
координаты точки в геометрическом
пространстве с N взаимно перпендикулярными
осями, обозначенными как ψ1,
...,
k,
...,
ψN.
Такое
многомерное пространство принято
называть пространством сигналов.
N)сигнал
u(t)
на
ограниченном интервале времени Т
полностью определяется совокупностью
безразмерных коэффициентов C1,
..., Ck,
...,
CN.
Эти
коэффициенты можно рассматривать как
координаты точки в геометрическом
пространстве с N взаимно перпендикулярными
осями, обозначенными как ψ1,
...,
k,
...,
ψN.
Такое
многомерное пространство принято
называть пространством сигналов.
Если каждое из совокупности чисел C1, ..., Ck, ..., СN умножить на орт соответствующей оси, то получим координаты вектора сигнала u(t) в N-мерном векторном евклидовом пространстве сигналов. При этом длина l (норма u) вектора, проведенного из начала координат к точке, изображающей сигнал,

Расстояние d между двумя точками пространства с координатами C1, ..., Ck, …, CN и C1, ..., Ck, ..., CN определяем по формуле:

При геометрическом представлении непрерывного сигнала uc(t) с ограниченным спектром Fc на интервале времени Tс в качестве координат сигнала используется совокупность N = 2FcTc отсчетов, получаемых в соответствии с теоремой Котельникова. Число измерений пространства обычно оказывается очень большим [34].
Если сигнал имеет размерность напряжения (или тока), то квадрат длины вектора определяет удельную энергию сигнала (выделяющуюся на резисторе с сопротивлением в 1 Ом).
Выразим ее через отсчеты функции uc(t):
Обозначим 2Fct = z. При этом dz = 2Fcdt. Раскрывая подынтегральное выражение в правой части равенства и принимая во внимание, что при k l

а
получим
или

где Рc — средняя мощность сигнала.
Так
как uc
(k![]() t)
мы
приняли за координаты сигнала, то в
соответствии с (2.55) левая часть выражения
(2.57) представляет собой квадрат длины
вектора сигнала, поэтому
t)
мы
приняли за координаты сигнала, то в
соответствии с (2.55) левая часть выражения
(2.57) представляет собой квадрат длины
вектора сигнала, поэтому
![]()
Отметим, что при одной и той же средней мощности сигнала удаленность конца соответствующего ему вектора от начала координат тем больше, чем больше его длительность и ширина спектра.
Рассмотрим, как будет изменяться положение конца вектора передаваемого сигнала в результате воздействия на него в канале связи аддитивной помехи в виде «белого шума» с ограниченным спектром.
Помеха геометрически представляется в виде случайного вектора, координатами которого являются случайные величины. Он не занимает определенного положения в пространстве, но при известном распределении координат помехи может быть подсчитана вероятность попадания конца вектора помехи в заданный объем пространства.
Если воздействие помехи выражается в изменении значений отсчетов сигнала, то координатами случайного вектора являются значения помехи в те же моменты времени. Принимая длительность помехи и ширину ее спектра равными соответственно Тс и Fc, помехи можно отобразить в том же N-мерном пространстве сигналов.
На практике и в теории наиболее часто мы имеем дело с помехой u(t), распределенной по нормальному закону с нулевым средним значением. Будем считать, что этот закон одинаков для всех моментов отсчета. Тогда все направления вектора помехи равновероятны. При этом область наиболее вероятного нахождения конца вектора помехи оказывается N-мерной сферой, радиус которой в соответствии с (2.58)
![]()
где Ρ — средняя мощность помехи за время Тc.
Если сигнал и помеха некоррелированы, вектор помехи располагается преимущественно перпендикулярно вектору сигнала. На рис. 2.19 расположение указанных векторов условно изображено в трехмерном пространстве. Конец результирующего вектора с высокой вероятностью располагается в одной из точек окружности, лежащей в плоскости, перпендикулярной вектору сигнала uc(t). Длина результирующего вектора
![]()
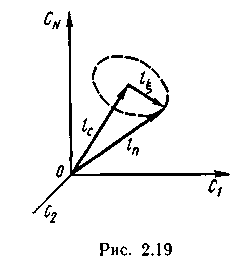
Таким образом, в результате действия помехи появляется неопределенность в положении результирующего вектора. Так как распределение помехи, как правило, не ограничено, то его конец может оказаться в любой точке пространства. При определенной средней мощности передачи совокупность вектора передаваемых сигналов (код) выбирают, исходя из характера помехи и требуемой верности. В пространстве сигналов каждому указанному вектору отводится собственная область пространства такая, чтобы вероятность попадания конца вектора за пределы этой области была меньше заданной.
Аналогично геометрическому отображению дискретно-непрерывных сигналов в евклидовом пространстве непрерывные сигналы u(t) представляются в гильбертовом пространстве. Оно имеет бесконечное число измерений и может отображать все непрерывные функции времени, заданные на определенном интервале [0,T]. Длину lг вектора (норма) в этом пространстве находят по формуле

Для расстояния между векторами u(t) и (t) соответственно имеем
![]()
Помехи, как и ранее, представляют случайными векторами.
Для геометрического отображения чисто дискретных сигналов, получающихся путем дискретизации и квантования по уровню, используются дискретные линейные векторные пространства. Размерность пространства соответствует числу отсчетов. Координаты сигнала принимают конечное число различных значений, кратных величине кванта Δ. Поэтому концы векторов сигналов располагаются в вершинах правильной точечной решетки. Частным случаем такой решетки является, например, N-мерный единичный куб, позволяющий представить совокупность комбинаций двоичного кода в пространстве Хэмминга, о чем подробнее сказано в гл. 6 (см.§ 6.3).
При прохождении по каналу связи сигналы подвергаются преобразованиям (дискретизации, модуляции и т.п.). Поэтому используются представления сигналов в различных пространствах (пространстве сообщений, пространстве передаваемых сигналов, пространстве модулированных сигналов, пространстве принимаемых сигналов).
Преобразования сигналов при этом рассматриваются как отображение одних векторных пространств другими.
Геометрические представления сигналов имеют весьма существенное значение при решении задач теории информации. Они позволяют наглядно изобразить процессы воздействия помехи на передаваемый сигнал, способствуют анализу путей устранения последствий такого воздействия, облегчают формирование и запоминание простых фундаментальных соотношений между основными параметрами сигнала и канала.