

§ 2.8. Дискретизация по критерию наибольшего отклонения
В процессе дискретизации непрерывная функция u(t) имеющая (n+1) ограниченных производных, аппроксимируется многочленом n-й степени. В зависимости от выбранного способа восстановления он может быть интерполирующим или экстраполирующим. Задача обеспечения минимальной погрешности при восстановлении сигнала на практике не ставится. Обычно указывается ее допустимое значение ε0.
Погрешность восстановления u(t) функции u(t) многочленом u*(t) на каждом участке аппроксимации определяется остаточным членом Ln(t):
![]()
Следовательно,
шаг дискретизации должен быть выбран
из условия Ln(t)![]() 0.
0.
Выбор аппроксимирующего многочлена более высокой степени при малой допустимой погрешности ε0 обеспечивает меньшее число отсчетов, однако, при этом существенно возрастает сложность технической реализации метода. Поэтому обычно ограничиваются многочленами нулевой, первой и второй степеней (ступенчатая, линейная и параболическая аппроксимации соответственно).
Преимущества и недостатки использования интерполирующих и экстраполирующих многочленов указывались ранее. В качестве интерполирующих чаще других используются многочлены Лагранжа, а в качестве экстраполирующих — многочлены Тейлора.
Дискретизация с использованием интерполирующих многочленов Лагранжа. Интерполирующий многочлен Лагранжа при равномерной дискретизации может быть записан в виде

где
![]()
Значение остаточного члена Ln(t)

где Mn+1 — максимальный во всем интервале преобразования модуль (n+1) - й производной сигнала u(t).
Пример 2.2. Определить шаг равномерной дискретизации на основе интерполирующих многочленов Лагранжа нулевой степени.
З начение
восстанавливающей функцииu*(t)
в любой
момент времени t
на каждом
j-м
интервале tj-1
начение
восстанавливающей функцииu*(t)
в любой
момент времени t
на каждом
j-м
интервале tj-1![]() tj,
принимается равным отсчету u(tj)
(рис. 2.6).
Соотношение (2.27) позволяет получить
выражение для остаточного члена:
tj,
принимается равным отсчету u(tj)
(рис. 2.6).
Соотношение (2.27) позволяет получить
выражение для остаточного члена:
![]()
Его максимальное значение пропорционально шагу дискретизации. Оно не должно превышать ε0. Отсюда условие, определяющее шаг дискретизации:
![]()
Если проводить восстановление сигнала u(t) по двум отсчетам, пользуясь функциями
![]()
то при том же шаге дискретизации погрешность восстановления уменьшится вдвое (рис 2.7).
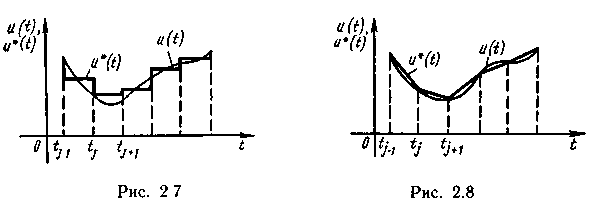
Пример 2.3. Определим шаг равномерной дискретизации с помощью интерполирующих многочленов Лагранжа первой степени.
При
восстановлении исходного сигнала u(t)
на каждом
интервале времени [tj-1,
tj]
используются
два отсчета u(tj)
и u(tj-1).
Они
соединяются прямой линией (рис.2.8)
Максимальное значение для остаточного
члена L![]() найдем,
приравняв нулю его производную.
найдем,
приравняв нулю его производную.
![]()
откуда допустимый шаг дискретизации
![]()
Дискретизация с использованием экстраполирующих многочленов Тейлора.Экстраполирующий многочлен Тейлора определяется выражением:
![]()
где un(t0) — n-я производная сигнала U(t) в момент времени t0.
Оценка снизу для остаточного члена имеет вид
![]()
Пример 2.4. Определим шаг равномерной дискретизации на основе многочлена Тейлора нулевой степени.
Значение
восстанавливающей функции u*(t)
в любой
момент времени t
на каждом
j-м
интервале tj-1![]() ,
принимается равным u(tj-1)
(рис. 2.9).
,
принимается равным u(tj-1)
(рис. 2.9).
Значение
остаточного члена L![]() достигает
максимума в конце интервала (при t=tj):
достигает
максимума в конце интервала (при t=tj):
![]()
поэтому шаг дискретизации должен удовлетворять условию
![]()
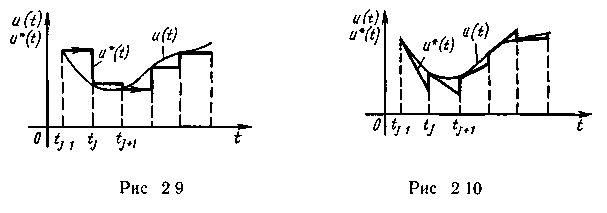
Пример 2.5. Определим шаг равномерной дискретизации с по мощью многочлена Тейлора первой степени.
При восстановлении сигнала u(t) помимо отсчета u(t0) используется значение первой производной в момент времени t0 - u'(to)
Максимум значения остаточного члена
![]()
достигается при t = tj, Соответственно получаем соотношение для шага дискретизации
![]()
Восстановление сигнала происходит без задержки во времени (рис 2.10) Однако по сравнению с интерполяционным методом (пример 2.3) для него требуется вдвое большее число отсчетов