

Метод коллокации.
Решение краевой задачи (5.49),
(5.50) ищем в виде

![]()
где ui(x) (I = 0, 1, 2, …, n) -- линейно независисмые ортогональные функции.
О бозначим
бозначим
![]()
П отребуем,
чтобы невязка
отребуем,
чтобы невязка
![]()
обращалась в нуль на некоторой системе точек x1, x2, …, xn отрезка [a, b].
Эти точки называются точками коллокации, их число должно равняться числу коэффициентов ci в выражении (5.60).
![]() Для
определения ci
получаем систему уравнений
Для
определения ci
получаем систему уравнений

Метод коллокации можно применить и для решения нелинейных уравнений
y’’ = f(x, y, y’).
c линейными краевыми условиями.
При этом невязка имеет вид
R(x) = y’’ - f(x, y, y’).
Система (5.63) будет системой нелинейных алгебраических уравнений относительно неизвестных ci.
Пример.
Методом коллокации найти приближенное решение уравнения
y’’ + (1 + x2)y + 1 =0
c краевыми условиями
y(-1) = y(1) = 0.
Выберем в качестве базисных функций u0(x) = 0, u1(x) = 1 – x2, u2(x) = x2(1-x2).
У словия
(5.65) для них выполняются. Решение будем
искать в виде
словия
(5.65) для них выполняются. Решение будем
искать в виде
З а
точки коллокации возьмем x0
= 0, x1
= ½.Составляем невязку R(x):
а
точки коллокации возьмем x0
= 0, x1
= ½.Составляем невязку R(x):
П одставив
x0
= 0, x1
= ½, получаем систему
одставив
x0
= 0, x1
= ½, получаем систему
Отсюда находим c1 = 0,957; c2 = -0,022.
Приближенное решение имеет вид

(взяла из интернета)
23.Аппроксимация производных конечно-разностными соотношениями.
«Идея метода заключается в сведении краевой задачи к решению системы алгебраических уравнений путем замены производных в дифференциальном уравнении и краевых условий конечно – разностными соотношениями»[3, 146 c.].
«Рассмотрим первую краевую задачу: { y" + p(x)y' + q(x)y = f(x), a < x < b; (3.1)
y(a) = ya, x = a; (3.2)
y(b) = yb, x = b (3.3)
и будем решать ее конечно - разностным методом, заменяя дифференциальные операторы отношением конечных разностей с использованием формул численного дифференцирования.
Для этого введем конечно-разностную сетку с шагом h: ω h = {xi = ih, i = 0,...,n}.
Поскольку
ОДУ (3.1) описывает поведение функции
у(х) внутри расчетной области x ∈
(a,b) , то производные 1-го и 2-го порядков
можно аппроксимировать с помощью
отношения центральных разностей со 2-м
порядком аппроксимации: ![]() (3.4)
(3.4)
![]() (3.5)
(3.5)
{p(xi), q(xi), f(xi)} ≡ {pi, qi, fi}, i= 1,...,n-1 (3.6)
Подставляя (3.4)-(3.6) в ОДУ (3.1), получим следующую конечно-разностную схему:

y0 = ya, i = 0; yn = yb, i = n, которую можно представить в виде следующей СЛАУ с трехдиагональной матрицей: ai yi-1 + biyi + ciyi+1 = di, i=1,...,n-1, (3.7)
где
![]()

 di
= fi.
di
= fi.
П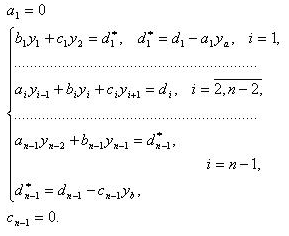 ри
i = 1 первое слагаемое в левой части (3.7)
известно и равно a1y0 = a1ya; при i = n-1 последнее
слагаемое в левой части также известно
и равно cn-1yn
= cn-1yb.
Поэтому СЛАУ (3.7) приобретает следующий
вид:
ри
i = 1 первое слагаемое в левой части (3.7)
известно и равно a1y0 = a1ya; при i = n-1 последнее
слагаемое в левой части также известно
и равно cn-1yn
= cn-1yb.
Поэтому СЛАУ (3.7) приобретает следующий
вид:
(3.8)
Здесь коэффициенты ai и cn-1 полагаются равными нулю только после вычисления правых частей d1* и dn-1*.
Теперь СЛАУ (3.8) пригодна для использования метода прогонки (она имеет трехдиагональную матрицу и a1 = cn-1 = 0).