

4. Преобразование информации в измерительных каналах
Измерительный канал, представляющий собой последовательно соединенные устройства, обеспечивает восприятие физических величин, их преобразование в электрический сигнал к виду, допускающему его регистрацию на каком-либо носителе информации.
В практике летных испытаний нашли применение в основном две схемы каналов:
1-я схема – «параметр–канал». Все элементы канала используются для регистрации только одного параметра. В случае многоточечных измерений однотипных параметров для каждой измерительной точки создается свой канал из тех же элементов.
2-я схема – «канал с коммутацией». Часть элементов канала используется для преобразования ряда однотипных параметров. Элементы канала последовательно подключаются к общей части с помощью коммутатора.
На рис. 3 приведена общая схема преобразования бортовой информации. Для канала с коммутацией показана схема прохождения измерительной информации с использованием радиотелеметрического оборудования при передаче сигналов на землю.
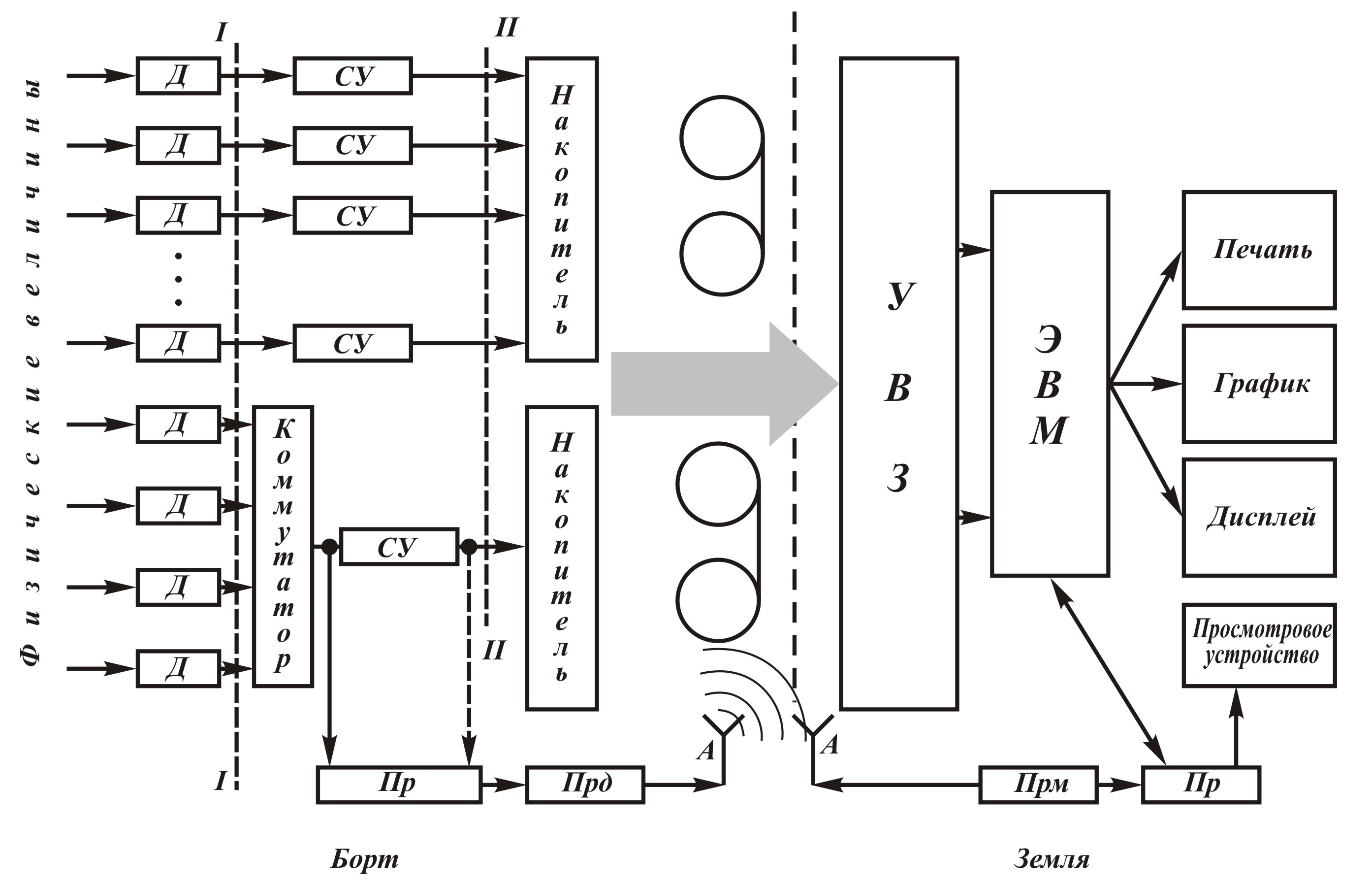
Рис. 3. Общая схема преобразования бортовой информации
Датчики (Д) (первичные преобразователи) служат для восприятия физических величин и преобразования их в электрический сигнал. Значения параметров электрического сигнала (амплитуда, частота) регистрируются. Основным звеном любого датчика является чувствительный элемент. Для унификации выходных сигналов датчиков установлены требования к их виду и уровню (первое сечение унификации I–I).
Согласующие устройства (СУ) служат для вторичного преобразования сигналов с датчиков (усиление или ослабление) к виду, воспринимаемому накопителем. Тип и принцип работы согласующих устройств зависят от вида записи. Если сигнал с датчика обладает достаточной мощностью для записи, то согласующее устройство в измерительной схеме может отсутствовать или его роль может выполнять простой делитель напряжения (второе сечение унификации II–II).
Записанная на борту информация после окончания эксперимента обрабатывается на земле на специализированных вычислительных системах, в которые вводится с помощью устройств воспроизведения (УВЗ).
В случае применения радиотелеметрического канала в измерительные каналы включаются дополнительные элементы. Преобразователь (Пр), воспринимающий сигналы с датчиков или согласующих устройств, обеспечивает модуляцию высокочастотной несущей передатчика (Прд). На борту устанавливается и передающая антенна (А) с круговой диаграммой направленности.
Переданную с борта информацию принимает наземная телеметрическая станция, основными элементами которой являются приемник (Прм) и преобразователь. Наземный преобразователь выполняет функции, обратные функциям бортового преобразователя. Продетектированная информация поступает на ЭВМ для обработки или на просмотровое устройство для оперативного анализа или регистрируется на наземных накопителях. Приемная антенна, имеющая острую диаграмму направленности, в ходе приема должна вращаться и отслеживать ЛА.
При компоновке бортовой системы измерений на борту ЛА необходимо:
обеспечить свободный подход к тем средствам измерения, которые в процессе эксплуатации нуждаются в частых проверках или в смене носителя;
создать удобные подходы к местам установки аппаратуры и системы в целом, к штепсельным разъемам. В местах размещения аппаратуры не должно быть источников сильных электрических и магнитных полей.
Бортовая система измерений должна быть полностью изолирована от других бортовых систем. Если возникает необходимость регистрировать какие-либо сигналы со штатных систем ЛА, то в них должен быть предусмотрен самостоятельный выход для связи с бортовой системой измерений.
В самом общем виде обобщенная структурно–функциональная схема (модель) преобразования информации в информационно–измерительной системе для летных испытаний показана на рис. 4.
Отдельные блоки преобразования представляют собой не технические устройства, а функциональные, которые могут быть выполнены в виде отдельных технических устройств или объединены в некоторые технические устройства. Последовательность блоков в модели преобразования информации не фиксирована. В реальных ИИС отдельные преобразования могут отсутствовать.
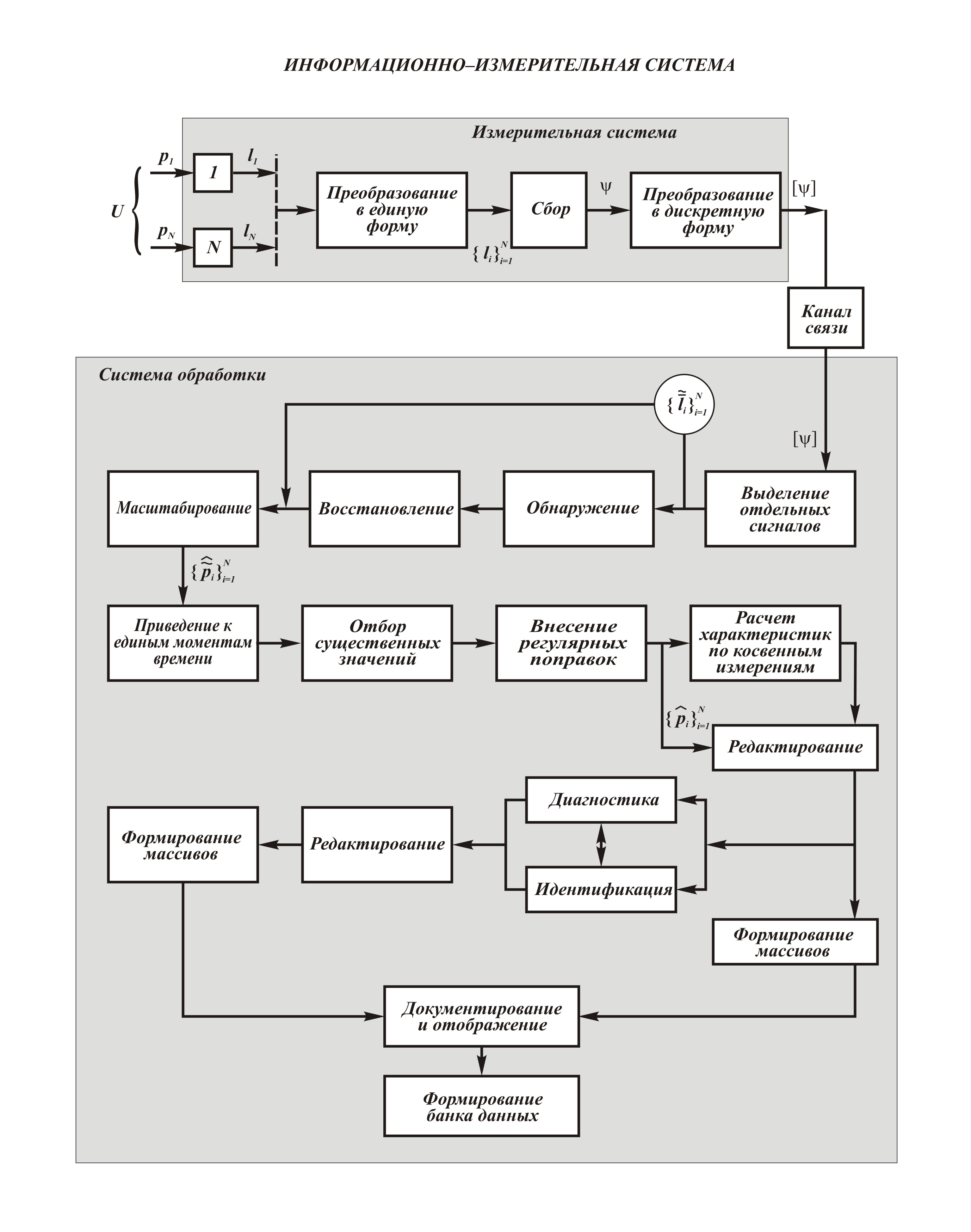
Рис. 4. Модель преобразования информации в ИИС
На вход ИИС поступает совокупность физических величин, преобразуемых датчиками (источниками информации) в совокупность электрических сигналов различной формы и динамического диапазона. После преобразования они нормируются, приобретая единую форму и динамический диапазон. В это преобразование входит усиление, ограничение, модуляция и т. п. Далее эти сигналы собираются в кодовую группу, называемую обычно кадром информации. На выходе блока сбора получается определенным образом организованный многомерный сигнал, в состав которого входит совокупность служебных сигналов, вводимых для распознавания кодовых групп и отдельных сигналов в них при обработке результатов измерений, а также для увязки всех измерений в едином времени. Для того, чтобы отдельные сигналы выделялись из многомерного с наименьшим взаимовлиянием, информационно–измерительная система строится так, чтобы функции, учитывающие градуировочные характеристики датчиков и преобразователей и спектральные преобразования, были ортогональными (непересекающимися функциями).
В качестве системы ортогональных функций могут быть приняты функции непересекающиеся во времени, непересекающиеся по спектру, или же непересекающиеся как по времени, так и по спектру. В первом случае информационно–измерительные системы носят название системы с временным разделением сигналов, во втором – с частотным разделением и в третьем – с разделением по форме. Большинство современных бортовых систем измерений и РТС выполняются с временным разделением сигналов.
С целью повышения помехоустойчивости при передаче сигналов по каналу связи, многомерный сигнал кодируется. Далее выполняется выделение отдельных сигналов, обнаружение и восстановление сигналов на фоне шума, в результате которых получается совокупность оценок сигналов. На выходе блока масштабирования, учитывающего градуировочные характеристики преобразователей и датчиков, имеется совокупность оценок физических величин, на основании которой, после приведения к единым моментам времени, отбора существенных значений и внесения регулярных поправок, рассчитываются физические величины и характеристики, получаемые на основании косвенных измерений. Исправленные, окончательные значения оценок физических параметров и характеристик, являющиеся результатами измерений, служат исходными для получения результатов летного эксперимента.
Формально часть операций переработки информации в информационно–измерительных системах детерминирована, например, преобразование в единую форму, сбор, преобразование в дискретную форму, масштабирование и другие. Некоторые же операции переработки, как, например, обнаружение и восстановление полезного сигнала на фоне шума, идентификация – статистические. Однако, в связи с тем, что входной сигнал измерительных систем летных испытаний содержит не только полезный сигнал, но и помеху, а система в целом имеет внутренние помехи и подвергается внешним возмущающим воздействиям, практически все переработки информации носят статистический характер.
В общем случае смесь полезного сигнала и помехи на входе в информационно–измерительную систему сложная. Между составляющими этой смеси могут быть корреляционные связи. Однако для большинства практических задач анализа и синтеза эта смесь представляется аддитивной, т.е. предполагается независимость полезного сигнала и помехи на входе системы.
По мере преобразования входного сигнала в информационно–измерительной системе происходит накопление погрешности от блока к блоку. На вход каждого блока поступает смесь преобразованных в предыдущем блоке полезного сигнала и помехи, а также внутренние помехи предыдущих блоков, причем многие из преобразований нелинейные. Поэтому сигнал, поступающий на обработку, обычно представляет собой случайный процесс и может существенно отличаться по своей структуре и статистическим характеристикам от входного сигнала. Для выполнения обработки измерений, т.е. получения оценок измеряемых величин, и эксперимента в целом – определения оценки оператора объекта, необходимо знание структуры и статистических характеристик сигнала, поступающего на обработку. Структура сигнала с его статистическими характеристиками носит название модель измерительной информации.
Структура модели измерительной информации может представлять собой непрерывный случайный процесс, дискретный случайный процесс, непрерывную или дискретную случайную последовательность. Измерительная информация большинства многомерных информационно–измерительных систем летных испытаний – бортовой системы измерений, РТС, ВТИ описывается в виде дискретных случайных последовательностей.