

2.5.2. Информационно–измерительная система «Гамма–ач»
Информационно–измерительная система «Гамма–АЧ» предназначена для сбора и регистрации высокочастотной информации в диапазоне частот 0 – 5000 Гц. В системе реализован метод частотной модуляции. Система «Гамма–АЧ» (рис. 5) применяется для обеспечения прочностных и аэродинамических исследований самолета и его силовой установки.
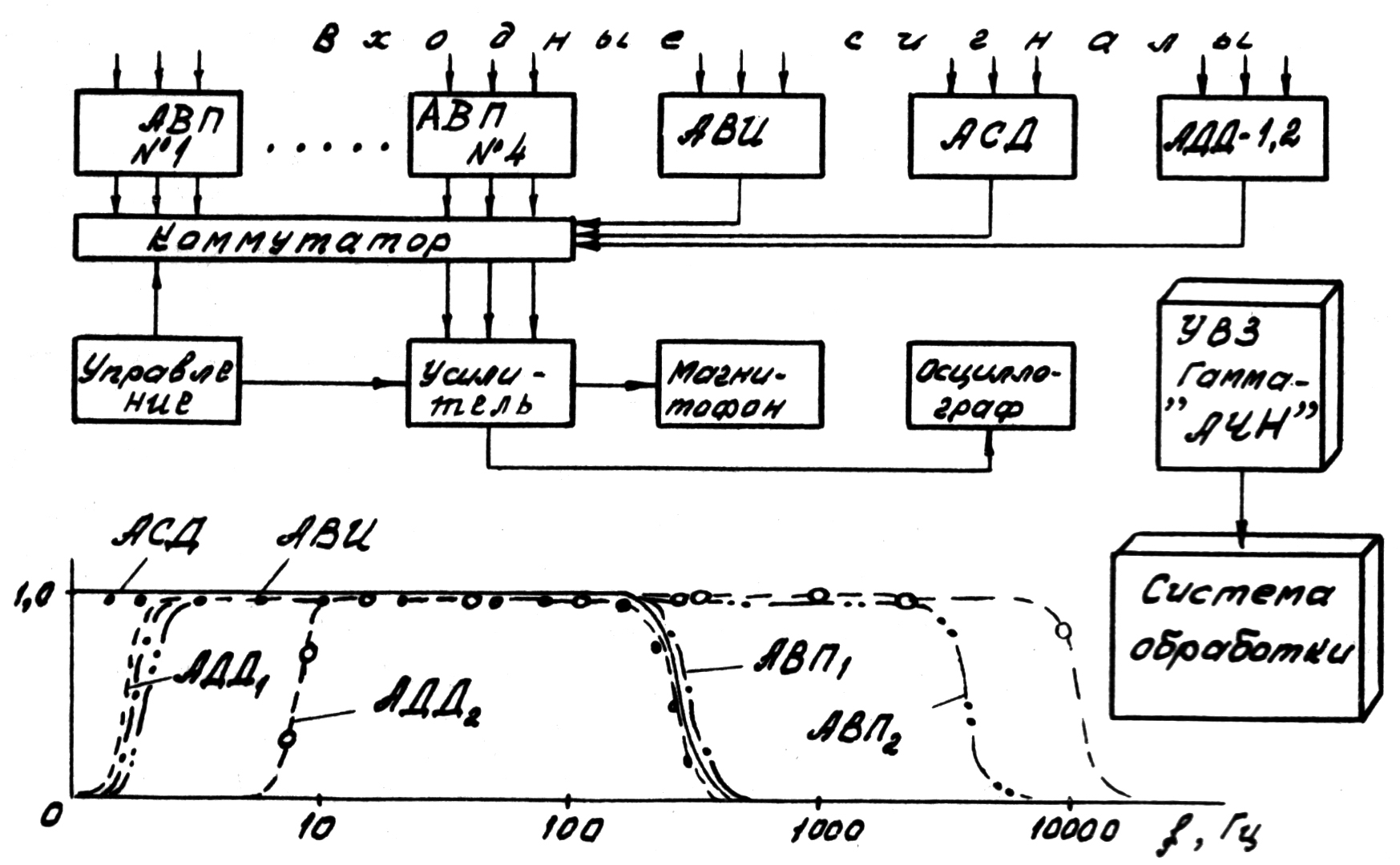
Рис. 5.
Входные сигналы с датчиков поступают на бортовые многоканальные системы (БМС), которые эти сигналы усиливают. В состав информационно–измерительной системы «Гамма–АЧ» входят пять типов бортовых многоканальных систем:
АВП – аппаратура для измерения вибраций с помощью пьезодатчиков (амплитудно–частотные характеристики типа полосового фильтра с рабочей полосой 2 – 5000 Гц с поддиапазонами);
АВИ – аппаратура для измерения вибраций с применением индуктивных датчиков (амплитудно–частотные характеристики типа фильтра нижних частот, рабочая полоса 0 – 100 Гц разбита на поддиапазоны);
АДД – аппаратура для измерения динамических деформаций в двух вариантах, различающихся рабочим диапазоном частот: 1 – 100 Гц (АДД–1) и 20 – 3000 Гц (АДД–2);
АСД – аппаратура для измерения статодинамических деформаций в диапазоне частот 0 – 100 Гц.
Расположение полос частот для бортовой многоканальной системы на оси частот показано на рис. 5.
Граничные частоты определены по уровню 0,95 для всех типов бортовых многоканальных систем.
Каждый тип аппаратуры выполнен в виде блоков. Каждый блок обеспечивает восприятие сигналов с четырех каналов. В состав бортовых многоканальных систем входит четыре блока, что позволяет при эксплуатации собирать бортовые многоканальные системы одного типа для регистрации 4, 8, 12, 16 каналов. Бортовые многоканальные системы, предназначенные для работы с мостами (тензодатчики), имеют встроенные балансировочные устройства. В информационно–измерительные системы одновременно могут быть включены бортовые многоканальные системы любого из пяти типов в любом сочетании, что позволяет регистрировать (без коммутатора) 16 каналов. За счет применения коммутатора можно увеличить количество регистрируемых параметров (до 96). Однако коммутация допустима только на установившихся режимах изменения сигналов.
С бортовых многоканальных систем или после коммутатора сигналы поступают на усилитель, который подает сигналы на регистрирующие устройства двух типов: магнитный накопитель и осциллограф.
Блок управления в информационно–измерительной системы «Гамма–АЧ» гораздо проще, чем блок управления и синхронизации в «Гамма–К», и функции его значительно уже. Он обеспечивает включение системы, осуществляет контроль работы ленто–протяжных механизмов и формирует отметку времени, которая записывается на магнитофоне на отдельную дорожку. На магнитном носителе в информационно–измерительной системе «Гамма–АЧ» на одну дорожку записывается один параметр.
Система имеет две модификации, различающихся только объемами. Модификация «Гамма–АЧБ» включает все рассмотренные бортовые многоканальные системы с магнитным накопителем «Узор–5В». Объем комплектации – 162 л (без коммутатора). Модификация «Гамма–АЧМ» содержит те же бортовые многоканальные системы с магнитным накопителем МH-1, объем комплектации – 62 л (без коммутатора).
В наземную часть системы входит устройство воспроизведения записи «Гамма–АЧН», которое контролирует качество и вводит информацию в системы обработки.