

3. Датчики сил, моментов, деформаций
Датчики сил, моментов и деформаций предназначены для измерения соответствующих параметров в системе органов управления самолетом и в элементах конструкции летательного аппарата.
Датчики сил и моментов называют динамометрическими. Упругими чувствительными элементами датчиков являются, как правило, резисторные (потенциометрические) и тензорезисторные силоизмерительные элементы. Силоизмерительный элемент, например, тензорезисторного датчика силы представляет собой совокупность упругого элемента датчика и размещенных на нем тензорезисторов и регулировочных резисторов, соединенных в электрическую цепь.
Схема преобразования силы и момента в электрический сигнал может быть представлена в следующем виде:
![]()
Приложенные сила
Fx и момент МF
вызывают деформацию
![]() упругого элемента соответствующего
датчика. Деформация (относительное
перемещение) упругого элемента, в свою
очередь, вызывает пропорциональное
линейное перемещение ХR
движка потенциометрического преобразователя
или деформацию
упругого элемента соответствующего
датчика. Деформация (относительное
перемещение) упругого элемента, в свою
очередь, вызывает пропорциональное
линейное перемещение ХR
движка потенциометрического преобразователя
или деформацию
![]() наклеенного на упругий элемент
тензорезистора. Преобразование указанных
неэлектрических величин в изменение
сопротивления
потенциометра и
наклеенного на упругий элемент
тензорезистора. Преобразование указанных
неэлектрических величин в изменение
сопротивления
потенциометра и
![]() тензорезистора осуществляется в
измерительной цепи. Выходными
электрическими величинами датчиков
являются напряжение Uвых или
сила тока Iвых,
регистрируемые соответственно аппаратурой
точной магнитной записи и/или светолучевым
осциллографом.
тензорезистора осуществляется в
измерительной цепи. Выходными
электрическими величинами датчиков
являются напряжение Uвых или
сила тока Iвых,
регистрируемые соответственно аппаратурой
точной магнитной записи и/или светолучевым
осциллографом.
Принципиальное отличие датчика деформации состоит в отсутствии дополнительного измерительного преобразователя – упругого элемента.
3.1. Датчики сил и моментов
Динамометрические датчики, применяемые при летных испытаниях летательных аппаратов, являются элементами конструкций этих аппаратов. Упругие деформации датчиков малы по сравнению с деформациями деталей, в которые они встроены, поэтому передаточными функциями датчиков служат передаточные функции узлов или целых систем (например, система продольного управления самолетом), где установлены динамометрические датчики. Решающей особенностью датчиков при летных испытаниях таких систем является обязательное выполнение норм прочности, по которым задаваемые расчетные нагрузки на них должны в 5...10 раз превышать измеряемые силы.
Электродистанционная система управления самолетом с многократным резервированием параллельных и независимых каналов потребовала применения комбинированного датчика – динамометрической боковой ручки. Важной особенностью этого датчика является обязательное многократное резервирование измерительных каналов с одновременным выполнением указанных норм прочности.
Чувствительными элементами датчиков являются упругие системы, имеющие одно, два или три определенных и постоянных направления (компоненты) деформации измерительного звена. Величина деформации по каждому направлению в этих системах служит мерой измеряемой силы. Чувствительные элементы такой схемы относятся к классу бесшарнирных чувствительных элементов, выполненных в моноконструкции.
В датчиках применяются две разновидности преобразования упругих систем в электрический сигнал. Достоинство потенциометрического преобразователя заключается в большом выходном электрическом сигнале, достаточном для его непосредственной регистрации аппаратурой точной магнитной записи. К недостаткам следует отнести наличие множительного механизма передачи деформации на движок потенциометра, большие габаритные размеры, а также перечень свойств, присущих контактным системам преобразования. Более перспективным является тензорезисторный метод преобразования, обеспечивающий многократное независимое резервирование измерительных каналов, повышенную точность и малые габаритные размеры. Встроенный (или автономный) усилитель на микросхемах обеспечивает работу датчиков с выходом на регистрирующие устройства аппаратуры точной магнитной записи.
Комплекс динамометрических датчиков органов управления самолетом содержит обычно датчики – динамометрические педали, датчик – динамометрический штурвал и датчики – динамометрические ручки (рис. 1).
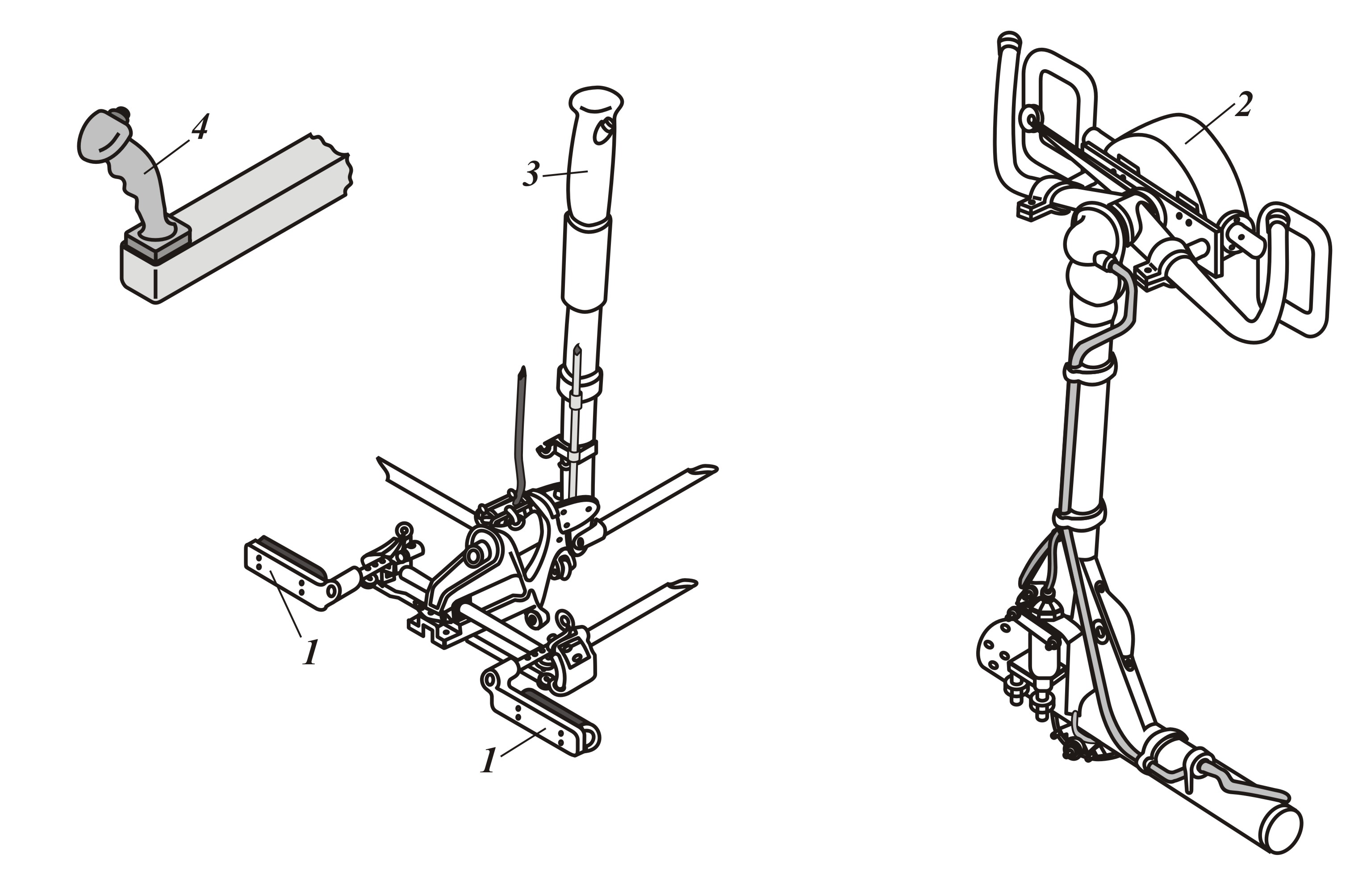
Рис. 1. Конструктивные схемы динамометрических датчиков: 1 – динамометрические педали; 2 – динамометрический штурвал; 3 – динамометрическая ручка центральная; 4 – динамометрическая ручка боковая.
Датчик – динамометрическая педаль предназначен для измерения силы, прикладываемой летчиком к педали управления самолетом, а точнее, для измерения составляющей этой силы на направление перемещения педали при движении руля направления самолета. Так как сила, передаваемая на руль направления, является разностью двух сил, одновременно приложенных к левой и правой педалям, динамометрическая педаль должна использоваться в комплекте из двух датчиков, укрепленных на левой и правой педалях (см. рис. 1, поз. 1).
Динамометрическая педаль состоит из чувствительного элемента с наклеенными на него фольговыми тензорезисторами, ложной педали, электромонтажных деталей и кожуха. Для уменьшения габаритных размеров и обеспечения высокой точности измерений чувствительный элемент изготовлен из цельной заготовки специальной стали. Он представляет собой сдвоенную раму, образованную из четырех плоских пружин, соединенных ригелями. Боковые жесткие ригели образуют основание датчика, при помощи которого он крепится к педали самолета. К среднему упругому ригелю крепится ложная педаль, через которую летчик прикладывает силу. Тензорезисторы правой и левой динамометрических педалей соединены в измерительный мост таким образом, что выходной сигнал его пропорционален разности сил, прикладываемых к обеим педалям. Этот мост обеспечивает также независимость выходного сигнала от неизмеряемых составляющих приложенных сил.
Датчик – динамометрический штурвал (устанавливается на тяжелых самолетах со штурвальным управлением) предназначен для измерения двух составляющих прилагаемой летчиком силы, которые вызывают отклонение руля высоты и элеронов. Отклонение руля высоты, вызываемое движением колонки штурвала, происходит под действием составляющей силы, направленной по оси поворота штурвала в колонке. Отклонение элеронов, вызываемое поворотом штурвала в колонке, происходит под действием составляющей силы, касательной к окружности рукояток штурвала. Динамометрический штурвал крепится на штурвале управления самолетом с помощью промежуточных деталей (рис. 1, поз. 2).
Датчик состоит из чувствительного элемента с наклеенными на него фольговыми тензорезисторами, двух рукояток, через которые летчик прикладывает силу для управления самолетом, и двух защитных крышек. Чувствительный элемент датчика состоит из двух групп плоских пружин, соединенных друг с другом двумя ободами и центральной втулкой. Каждая группа пружины предназначена для измерения только одной составляющей приложенной силы. Одна группа пружин, лежащих в двух радиальных плоскостях и соединяющих втулки с внутренним ободом, служит для измерения касательной составляющей силы. Вторая группа пружин, лежащих в двух торцовых плоскостях и соединяющих наружный обод с внутренним, служит для измерения осевой составляющей приложенной силы. Тензорезисторы наклеиваются на обе стороны пружин верхней части чувствительного элемента в местах наибольших напряжений. Соединение тензорезисторов в мосты для измерения осевой и касательной составляющих производится таким образом, чтобы исключить влияние неизмеряемых составляющих. Конструктивно чувствительный элемент выполнен из трех деталей, две из которых являются пружинами, а третья, служащая для крепления датчика, соединяет пружины по центральной втулке и играет роль упора, воспринимающего нагрузки, превышающие диапазон измерения. К ободу чувствительного элемента крепятся рукоятки, через которые летчик прикладывает силу при управлении самолетом.
Датчик – динамометрическая ручка центральная предназначен для измерения двух составляющих силы, прикладываемой летчиком к ручке управления самолетом. Два взаимноперпендикулярных направления, по которым измеряются составляющие, соответствуют направлениям перемещения ручки управления при движении руля высоты (ручка «на себя», «от себя») и элеронов (ручка «вправо», «влево») (рис. 1, поз, 3). Датчик устанавливается на ручке управления самолетом вместо ее верхней части (рукоятки).
Динамометрическая ручка с тензорезисторным преобразователем состоит из чувствительного элемента, помещенного в рукоятку, электромонтажных деталей и стакана крепления. Чувствительный элемент представляет собой раму из стоек, являющихся с обоих концов жесткими ригелями. К верхнему подвижному ригелю крепится рукоятка, к нижнему неподвижному ригелю – стакан, с помощью которого датчик монтируется на ручке управления самолетом. На пружины в местах наибольших напряжений наклеены фольговые тензорезисторы, которые образуют два моста для измерения составляющих сил, прикладываемых летчиком к ручке управления самолетом. Тензорезисторы соединены в мосты так, чтобы исключить влияние неизмеряемых составляющих сил и моментов на показания датчика. У некоторых моделей потенциометрических ручек имеется преобразователь и связанный с ним множественный рычажный передаточный механизм, осуществляющий разложение перемещений чувствительного элемента по заданным направлениям и передачу их в увеличенном масштабе движкам потенциометров. Передаточный механизм, кроме того, исключает влияние неизмеряемых составляющих сил и моментов на показания датчика.
Датчик – динамометрическая ручка боковая предназначен для формирования электрических управляющих сигналов по трем компонентам (крену, тангажу и рысканию), пропорциональных продольным и поперечным составляющим сил и моментов, прикладываемых летчиком к ручке управления. Датчик (рис. 1, поз. 4) при этом совмещает функции управления и измерения. Ручка боковая, в отличие от ручки центральной, имеет малое ( 10 мм) перемещение рукоятки управления. Это повышает динамику управления самолетом, упрощает компоновку кабины, улучшает работу летчика при больших перегрузках.
Датчик обеспечивает четырехкратную резервированную электрическую связь по каждому измерительному каналу.
В качестве упругого чувствительного элемента боковой ручки выбрана комбинация двух соосных крестообразных пружин. Верхняя – предназначена для канала рыскания, нижняя – для каналов тангажа и крена. К центральной втулке верхней пружины крепится рукоятка, к которой прикладываются силы и моменты. Крутящий момент относительно оси рукоятки воспринимается этой пружиной, и тензорезисторы, наклеенные на спицах, в местах наибольших нормальных напряжений формируют измерительный сигнал для канала рыскания. В свою очередь, обод верхней пружины через переходную деталь жестко соединен с центром нижней пружины для передачи на нее усилий, приложенных к рукоятке в продольном и поперечном направлениях. Соответственно, тензорезисторы, наклеенные на спицы, ось которых направлена вдоль продольной оси самолета, формируют сигнал для канала тангажа, а тензорезисторы, наклеенные на спицы, ось которых направлена параллельно поперечной оси самолета, формируют сигнал для канала крена. Обод нижней пружины имеет резьбовые отверстия для крепления ручки на объекте. Для обеспечения независимости деформаций пружины смещены по ободу относительно друг друга на угол 450. Каждая пружина имеет свое кроссировочное поле, расположенное на ней, где на контактных колодках распаиваются выводы от тензорезисторов, наклеенных на спицах пружин, и осуществляется балансировка мостов. Это делает возможным применять каждую из пружин автономно. Компоновка собственно измерительного узла отдельно от рукоятки позволяет использовать любую рукоятку и менять углы ее установки. Каждый компонент управления выполнен четырежды резервированным. Соответственно каждый канал представляет собой мост из четырех тензорезисторов, соединенных таким образом, чтобы они формировали сигнал только от сил и моментов для управления данным каналом и не реагировали на силы и моменты, прикладываемые для управления другими каналами. Для ограничения действующих на измерительный элемент сил и моментов, превышающих рабочие, предусмотрены упоры.
Суммарная погрешность динамометрических датчиков определяется, в основном, составляющими инструментальной погрешности, однако профессиональное применение конструктивно–технологических методов построения датчиков, использование эффективных методов температурной компенсации тензорезисторных измерительных цепей позволяют обеспечить допустимую погрешность датчиков. Частоты собственных колебаний силоизмерительных элементов во много раз превосходят максимальную частоту (1 ... 2 Гц) изменения измеряемого параметра.
В зависимости от целей измерения сил динамометрические датчики устанавливаются в первом или последнем от летчика звене системы. Датчики – динамометрические ручки (центральные) и штурвалы располагаются взамен или рядом с соответствующими элементами системы. Датчик – динамометрическая боковая ручка устанавливается на специальном подлокотнике с правой стороны от летчика. Датчики – динамометрические педали обычно закрепляются на педали управления самолетом. Датчики, устанавливаемые на рычагах управления, не должны стеснять работу летчика.
В практике летных испытаниях известное применение получили динамометрические датчики специального назначения, в основном, с тензорезисторными преобразователями. К таким датчикам следует отнести, прежде всего, датчики для измерения сил в тягах органов управления, а также растягивающей силы в шланге при заправке топливом в полете. Динамометрический датчик лыжи, например, измеряет три составляющие силы, действующие на лыжу самолета при его движении по земле, на взлете и при посадке, и момента этой силы относительно оси, нормальной к поверхности земли.