

3. Потенциометрические датчики
Эти датчики охватывают практически весь диапазон величин измеряемых давлений, работают длительно при температуре окружающей среды до 2000С с погрешностью 5%, имеют малые габаритные размеры и массу ( 200 г). Динамические свойства датчиков невысоки. Собственная частота лежит в пределах 2...20 Гц.
Ограничение частотного диапазона вызвано наличием механических связей и значительных присоединенных масс в кинематических цепях датчиков, что создает большую инерционность и снижает собственную частоту датчика.
Другим важным фактором, снижающим динамические свойства датчиков, является необходимость обеспечения устойчивого контакта между движком и обмоткой измерительного потенциометра. При больших скоростях перемещения движка возможна потеря контакта. Это явление особенно свойственно проволочным потенциометрам, контактная дорожка у которых представляет собой волнообразную поверхность. Наличие механических вибраций при работе датчика увеличивает вероятность нарушения контакта. В этом случае имеет место явление «подскока» движка, особенно на резонансных частотах, когда искажается не только амплитуда, но и частота исследуемого процесса. Неустойчивая работа датчика может наблюдаться как на малых частотах и больших амплитудах колебаний давления, так и наоборот, на высоких частотах и малых амплитудах давления. У датчиков, способных работать в неустойчивом режиме, определяют, как правило, амплитудно–частотные характеристики на фиксированных частотах, доводя их работу до режима неустойчивости, и выявляют границы устойчивой работы.
4. Датчики с пневмокоммутаторами давления
Применяются эти датчики для измерения большого числа, медленноменяющихся параметров давления при обеспечении высоких требований к точности измерения. Характерной особенностью прибора является наличие в нем коммутатора давления – устройства, позволяющего использовать один датчик для последовательного измерения давления в нескольких десятках точек. Применение пневмокоммутаторов в сравнении с применением коммутаторов электрических сигналов дает ряд преимуществ: значительно сокращается состав аппаратуры, упрощается система в целом. Наличие контрольного датчика в системе позволяет повысить точность измерений. Основным недостатком пневмокоммутатора является его низкое быстродействие (из–за инерционности механической системы и длительности переходных процессов в полостях коммутатора и датчика при переключении). Пневмокоммутаторы по конструктивному исполнению можно классифицировать на: золотниковые и клапанные. Наибольшее применение нашли пневмокоммутаторы первой группы. Высокие требования предъявляются к датчику давления. Функциональная схема работы системы приведена на рис. 1.
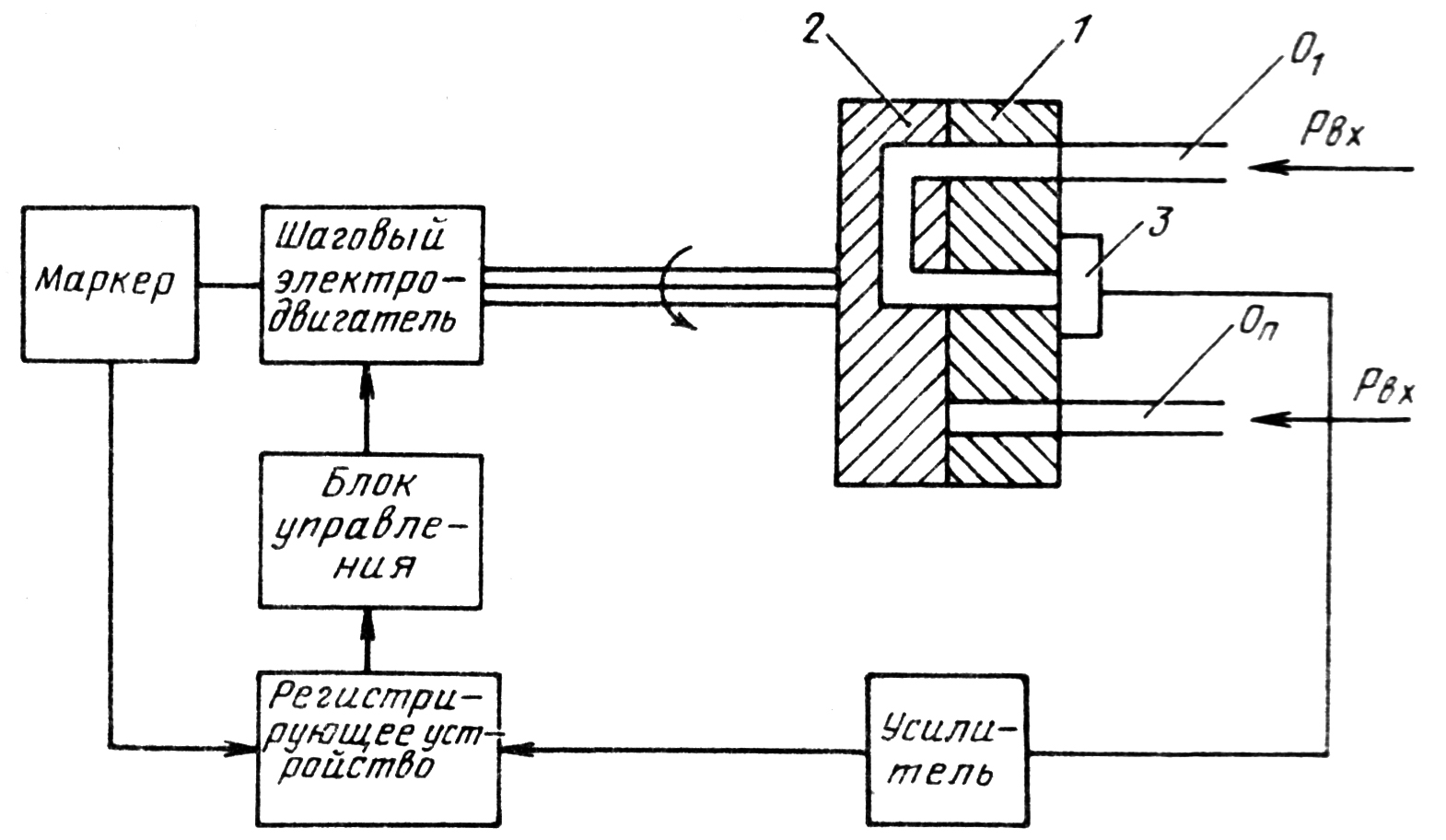
Рис. 1. Система датчик–пневмокоммутатор давления.
Принцип действия пневмокоммутатора реализуется золотниковыми устройствами с плоской рабочей парой. Схема основного рабочего узла состоит из двух дисков – неподвижного 1 и поворотного 2, плотно прилегающих друг к другу, что достигается высокой точностью и чистотой обработки поверхности. В неподвижном диске имеются расположенные по окружности отверстия О1 и Оп, к которым подключаются пневмотрассы от точек измерений. Центральное отверстие неподвижного диска соединено с рабочей полостью датчика 3. При вращении от шагового электродвигателя канал в поворотном диске последовательно через пневморазъем соединяет отверстия в неподвижном диске с его центральным отверстием, т.е. с датчиком. Регистрирующее устройство через усилитель фиксирует электрические сигналы датчика в виде последовательности импульсов, амплитуда которых пропорциональна, величине измеряемого давления. Для определения последовательности опроса измеряемого давления на параллельный канал регистрирующего устройства записываются сигналы маркера в виде чередования прямоугольных импульсов. Начало отсчета совпадает с опросом первого канала и отличается минимальным значением импульса маркерного устройства.
Система может работать с регистрирующим устройством в режиме внешней синхронизации и автономном режиме. Она получила наибольшее распространение при измерении полей давления по тракту газотурбинных двигателей.