

1.2. Аксиомы статики
В основе статики лежит ряд основных положений, полученных в результате наблюдений, опыта и практической деятельности людей. На основании этих положений, называемых аксиомами статики, путем строгих математических доказательств делаются все последующие выводы.
1 аксиома статики, получившая название аксиомы инерции, заключается в следующем:
Аксиома 1. Изолированная материальная точка находится в состоянии покоя или движется равномерно и прямолинейно.
Согласно этой аксиоме, материальная точка может двигаться равномерно и прямолинейно без приложенной к ней силы (по инерции). Изменить состояние покоя или равномерного прямолинейного движения материальной точки может только сила.
Упомянутые два состояния точки объединяются в общем понятии "равновесие".
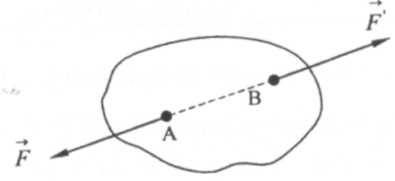
Аксиома 2. Две силы, приложенные к твердому телу, взаимно уравновешиваются только тогда, когда они равны по величине и направлены по одной прямой в противоположные стороны (рис. 1.1).
 Из
этой аксиомы и рис. 1.1. следует, что при
равновесии рассматриваемого тела F
= F
Рис.
1.1
Из
этой аксиомы и рис. 1.1. следует, что при
равновесии рассматриваемого тела F
= F
Рис.
1.1
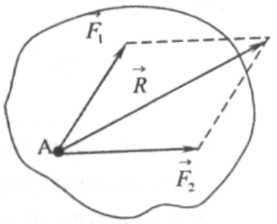
Аксиома 3. Две силы, приложенные к твердому телу в одной точке, имеют равнодействующую, приложенную в этой же точке и изображаются диагональю параллелограмма, построенного на этих силах, как на сторонах.
 На
рис 1.2 показана равнодействующая R
двух
сил F1
и
F2,
приложенных
к твердому телу в точке А.
Операция
замены системы сил её равнодействующей
называется сложением данной системы
сил.
На
рис 1.2 показана равнодействующая R
двух
сил F1
и
F2,
приложенных
к твердому телу в точке А.
Операция
замены системы сил её равнодействующей
называется сложением данной системы
сил.
Мы видим, что сложение двух сил, приложенных к твердому телу в одной точке, подчиняется правилу векторного сложения, чем подтверждается высказанное предположение о том, что сила есть вектор.
Таким образом, равнодействующая двух сил, приложенных к твердому телу в одной точке, равна их векторной сумме, т.е. ¯R = ¯F1+¯F2. (1.1)
Аксиома 4. Присоединение или отбрасывание взаимно уравновешивающихся сил не изменяет действия данной системы сил на твердое тело.
Например, если Q=Q, то системы сил, показанные на рис. 1.3, статически эквивалентны, так как на основании аксиомы 2 силы Q и Q/ взаимно уравновешиваются и, следовательно, в силу аксиомы 4, их можно присоединить или отбросить.
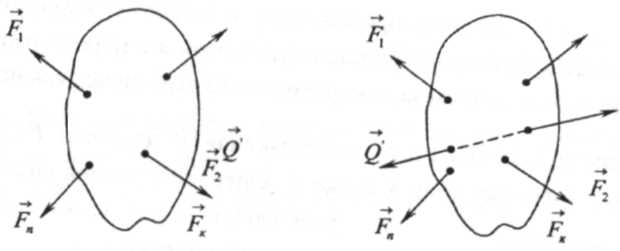
Рис. 1.3
Аксиома 5. Если каждая из двух систем статически эквивалентна одной и той же третьей системе, то они статически эквивалентны между собой. Понятно, что если система сил А статически эквивалентна системе С, и в то же время система В статически эквивалентна системе С, то и системы А и В статически эквивалентны одна другой.
Из приведенных аксиом вытекают следующие следствия.
Следствие 1. Не изменяя действия силы на твердое тело, можно переносить её точку приложения вдоль линии действия на любую точку тела.
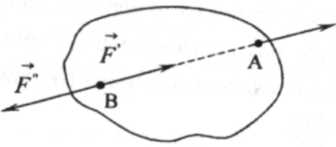
Рис. 1.4
В самом деле, три одинаковые по модулю силы F , F / и —► F ? / (рис. 1.4), направленные вдоль прямой, проходящие через точки А и В, статически эквивалентны, с одной стороны, силе F, так как силы F и F" взаимно уравновешиваются, и с другой стороны, силе и F , так как уравновешиваются силы F и F'/ . Следовательно, статически эквивалентны силы F и F"', т.е. точку А приложения силы F можно переносить вдоль её линии в любую точку В твердого тела.
Такие векторы, которые по их физическому смыслу можно переносить вдоль прямых, по которым они направлены, называются скользящими векторами.
Следовательно, сила есть вектор скользящий.
Следствие 2. Сила ¯R (рис. 1.5) равная по модулю равнодействующей ¯R и направленная по одной с ней прямой в противоположную сторону, уравновешивает данную систему сил.
 Поскольку
сила R/
уравновешивает
равнодействующую R,
то
она уравновешивает и статистически
эквивалентную ей систему сил.
F1
F2
….Fn
Поскольку
сила R/
уравновешивает
равнодействующую R,
то
она уравновешивает и статистически
эквивалентную ей систему сил.
F1
F2
….Fn
Шестая аксиома, называемая аксиомой действия и противодействия, заключается в следующем:
Аксиома 6. Силы взаимодействия любых двух материальных объектов всегда равны по величине и направлены по одной прямой в противоположные стороны.
![]() ¯
F¯
F?¯
¯
F¯
F?¯
![]() Эта
аксиома, сформулированная Ньютоном,
означает, что если объект А
(рис.
1.6) действует на объект В
и
это действие выражается силой F
, то
объект В
оказывает
объекту А
противодействие,
выраженное силой F/
,
причем F
=
-
F'.
Эта
аксиома, сформулированная Ньютоном,
означает, что если объект А
(рис.
1.6) действует на объект В
и
это действие выражается силой F
, то
объект В
оказывает
объекту А
противодействие,
выраженное силой F/
,
причем F
=
-
F'.
Таким образом, всякой силе, приложенной к некоторому материальному объекту, соответствует равная ей по модулю и прямо противоположная по направлению сила, приложенная к другому объекту, взаимодействующему с данным. Подчеркнем, что силы действия и противодействия не уравновешивают друг друга, так как они приложены к различным объектам.
Седьмая аксиома называется аксиомой отвердения. Она заключается в следующем:
Аксиома 7. Если нетвердое тело находится в равновесии под действием приложенных к нему сил, то равновесие его не нарушается при его отвердении.
Из этой аксиомы следует, что если нетвердое тело находится в равновесии под действием приложенных к нему сил, то под действием этой же системы сил будет находиться в равновесии и Рис. 1.7 соответствующее абсолютно твердое тело.
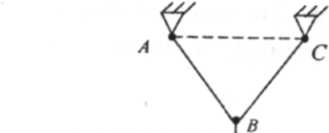 Например,
если нить ABC
(рис.
1.7), закрепленная в точках А
и
С, находится в равновесии под действием
приложенной к ней вертикальной
Например,
если нить ABC
(рис.
1.7), закрепленная в точках А
и
С, находится в равновесии под действием
приложенной к ней вертикальной
силы F, то под действием этой же силы будет находиться в равновесии и абсолютно твердое тело, имеющее такую же форму. Обратное заключение сделать нельзя, т.е. из того, что под действием некоторой системы сил находится в равновесии абсолютно твердое тело, вовсе не следует, что под действием этой же системы сил будет находиться в равновесии и любое нетвердое тело.
Например, если к нити, показанной на рис. 1.7 приложить в. точке В силу, направленную по вертикали вверх, то она не будет находиться в равновесии, тогда как соответствующее абсолютное твердое тело и в этом случае будет находиться в равновесии.
Из этого следует, что вместо равновесия реально существующих тел, можно рассматривать равновесие соответствующих абсолютно твердых тел.
Этими аксиомами и следствиями из них мы будем пользоваться при изложении последующих тем статики, в которых рассматриваются различные виды систем сил, приложенных к материальному объекту.
Простейшей из таких систем является система сходящихся сил.