

§ 8.3. Работа ару
в статическом режиме
Исходными данными являются заданный динамический диапазон входного сигнала (а) и допустимый динамический диапазон выходного сигнала (В) [171:
(X = Uъ\ шах/с/вх min » Р ~
— Uвых шах/С^вых гЫп> (8-2)
Отсюда легко определить требуемый динамический диапазон регулировки усиления:
G р = Aomax/A"omin =
— с/вых min с/Вх max/^VBx min с/вых max ~
= а/р. (8.3)
Максимальному усилению соответствуют минимальные по амплитуде входной и выходной сигналы и наоборот.
Выбрав вид и число п регулируемых элементов, для каждого из них можно рассчитать или измерить регулировочную характеристику, т. е. функцию Km («p), а затем получить общую регулировочную характеристику регулируемого тракта прохождения сигнала:
![]() (8.4)
(8.4)
Примерный вид регулировочной характеристики изображен на рис. 8.12. Поскольку Gp 103-f-106, график регулировочной характеристики строят обычно в полулогарифмической системе координат. При выбо-

ре числа регулируемых элементов необходимо принимать во внимание допустимые нелинейные искажения, увеличивающиеся при переходе рабочих точек в области сильной нелинейности. При увеличении числа п регулируемых элементов крутизна регулировочной характеристики возрастает и перемещение рабочей точки в каждом регулируемом элементе уменьшается, т. е. уменьшаются в нелинейные искажения. Однако при увеличении числа п все регулируемые элементы оказываются дополнительно связанными через общий источник напряжения Up, что иногда затрудняет обеспечение устойчивости регулируемых ВЧ-усилителей.
В обратных системах АРУ при подаче напряжения ир на каскады УПЧ число регулируемых каскадов обычно колеблется в пределах 2—5. Сами регулируемые каскады должны располагаться возможно ближе к входу приемника как с точки зрения лучшей защиты от перегрузок, так и по соображениям уменьшения нелинейных искажений (коэффициент нелинейных искажений в УВЧ и УПЧ пропорционален UI, где U0 — амплитуда сигнала на входе каскада).
В регулируемом тракте желательно объединять регулируемые элементы с близкими крутизнами регулировочных характеристик для того, чтобы регулирующее действие распределялось между ними примерно поровну. Считая /Сотах =Кона„ можно
найти
Aomin = Aomax/Gp =/Сонач/^р» (^-э)
а по значению Кошв определить "ртах на регулировочной характеристике рис. 8.12.
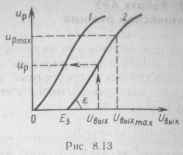
Это значение u„max должна обеспечить система АРУ при подаче на ее вход максимального сигнала в точке съема напряжения для запуска системы АРУ. Будем считать, что на вход системы АРУ подается выходное напряжение БВЧ (см., например, рис. 8.1, 8.2). Тогда цепь АРУ будет обладать амплитудной характеристи-
кой Up ((/вы<){ Примерный вид таких характеристик изображен на рис. 8.13 (кривая / для незадержанной, кривая 2 — для задержанной системы АРУ). В задержанной системе АРУ регулирующее напряжение появляется только при £/вых > £.,. При очень большом напряжении УВых цепь АРУ может перегружаться, что приводит к загибу характеристики.
Тангенс угла наклона амплитудной характеристики определяет коэффициент усиления цепи АРУ — Кару. Считая эту характеристику прямой, можно записать

(«.6)
Снижать усиление при Сных < < ^BMimin нерационально, поэтому имеет смысл брать £., - ^1!Ыуш!п. т. е. включать систему АРУ после того, как выходное напряжение достигнет номинального значения и может быть использовано при допустимых искажениях. Тогда с учетом равенства (7ВЬ|Н mln = из (8.6) получим
£.! ~ Up тах//Сдру ({$— 1). (8.7)
Из уравнений (8.6) и (8.7) следует, что невозможно получить «идеальную» обратную систему АРУ, для которой Р 1. Это потребовало бы бесконечно большого усиления или в цепи АРУ, или в тракте прохождения сигнала, поскольку при £3—<-оо ^bi.iv пни 00 при конечном значении
^вх-
Так как Кару КдКу, где Яд — коэффициент передачи детектора АРУ, а Ку — коэффициент усиления усилителя АРУ, из (8.6) и (8.7) видна роль усилителя АРУ в Улучшении стабилизации выходного
напряжения. Чем больше Кар тем ближе р" к единице ф
![]()