

Принципова схема стереодалекоміра
Принципова схема стереодалекоміра зображена на рис.2.33, де АВ – база стерео далекоміра; АС – дальність до цілі; α – паралактичний кут.
На кінцях бази розміщені кінцеві відбивачі З, які відхиляють промені світла, що падають на них, на 900 і спрямовують їх в об’єктиви Об, які розміщені за кінцевими відбивачами.
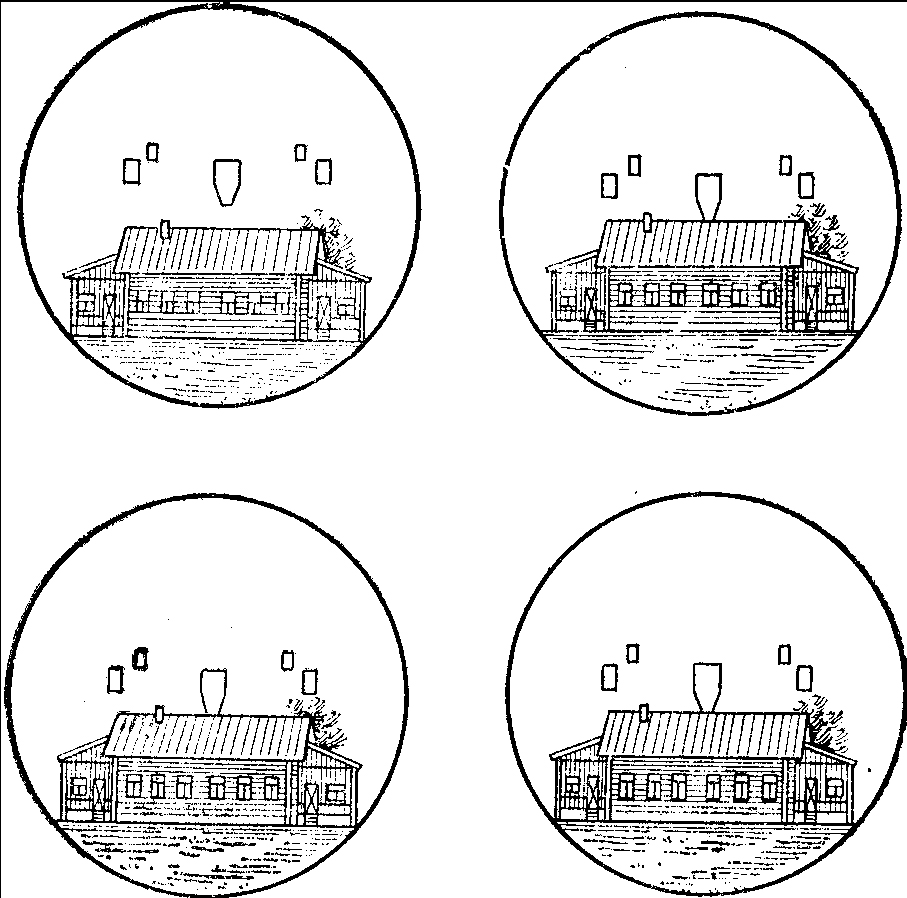
Рисунок 2.32 – Спосіб наведення далекоміра на ціль (об’єкт) (ліворуч уверху правильно, решта – неправильно)
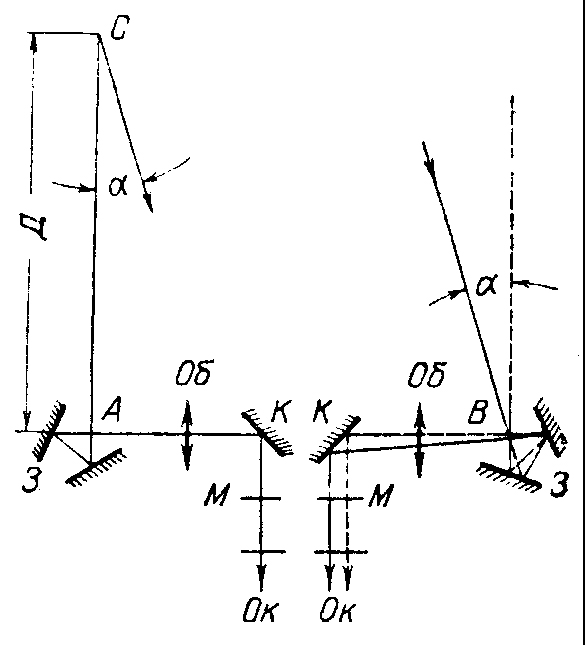
Рисунок 2.33 – Принципова схема стереодалекоміра
Далі промені зустрічають на своєму шляху дзеркала К, які відхиляють їх на 900 по напрямку до окулярів Ок. Зображення, які даються об’єктивами, утворюються у фокальних площинах М, де розміщуються пластинки з вимірювальними марками.
Зображення предметів, що спостерігаються, і вимірювальних марок розглядаються через окуляри Ок. (Фокальною площиною називають площину, що перпендикулярна до оптичної осі стереодалекоміра і проходить через фокус об’єктива).
Стереоскопічні далекоміри, в основу яких покладені подібні оптичні схеми, дуже чутливі до факторів зовнішнього впливу (трясці, зміни температури і т.д.), тому в процесі експлуатації вони вимагають повсякденної вивірки за дальністю і висотою.
Для підвищення точності вимірювання відстані і зручності в експлуатації розроблені схеми далекомірів, які не розладнуються. Найбільш ефективною в цьому відношенні є схема стереодалекоміра з біаксіальним коліматором і марками, що світяться (рис.2.34).
Зорова система І у такій схемі така сама, як у схемі на рис.2.33, і відрізняється лише тим, що у фокальній площині не розміщені вимірювальні марки.
Вимірювальні марки М (рис.2.34) проектуються у поле зору зорової системи із біаксіального коліматора ІІ.
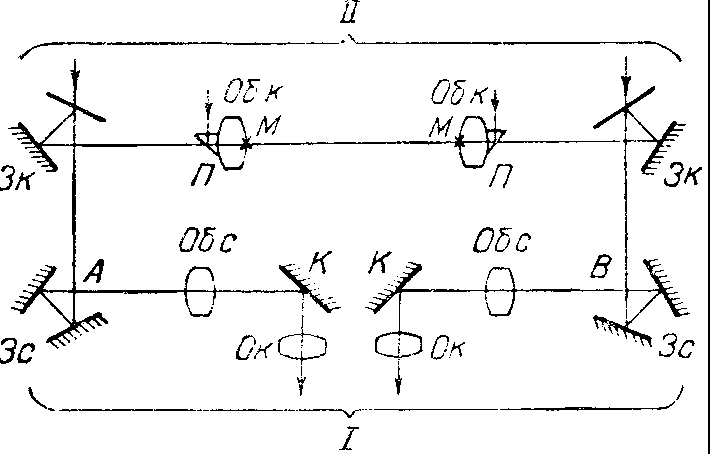
Рисунок 2.34 – Схема стереодалекоміра з біаксіальним
коліматором і марками, що світяться
Права марка М розміщена у головній площині об’єктива Обк і одночасно у фокальній площині лівого об’єктива Обк, ліва марка М – у головній площині лівого об’єктива і одночасно у фокальній площині правого об’єктива.
Отримуючи освітлення від денного світла або від лампочки (через призму П), вимірювальні марки проектуються у поле зору зорової системи освітленими.
Пучки світла, що виходять із біаксіального коліматора, проектують вимірювальні марки М у двох протилежних напрямках (у праву і ліву сторони зорової системи) за допомогою кутових дзеркал Зк, які встановлені безпосередньо перед кутовими дзеркалами Зс (кінцевими відбивачами) зорової системи.
Передні пластини кутових дзеркал Зк, які розміщені проти вхідних вікон стереодалекоміра, покриті відбиваючим шаром, який пропускає промені світла від цілі і відбиває промені світла, які проектують вимірювальні марки із біаксіального коліматора.
Пучки світла, які проектують вимірювальні марки, після відбиття від передніх поверхонь кутових дзеркал коліматора йдуть разом з пучками світла від цілі, які надійшли в стереодалекомір через вхідні вікна.
Далі пучок світла потрапляють у кінцеві відбивачі Зс зорової системи. Проходять об’єктиви Обс і дзеркалами К спрямовуються в окуляр Ок стереодалекоміра.
Біаксіальний коліматор усуває розладнання стереодалекоміра за дальністю, яке може бути викликано незначним зміщенням об’єктивів або вимірювальних марок у площині, що перпендикулярна оптичній осі, в результаті прогину труби, однобічного нагріву і впливу інших механічних факторів.
Для зменшення розладу кінцевих відбивачів Зк їх виготовляють теплостійкими.
Стереодалекоміри, що побудовані за такою схемою, не вимагають систематичної вивірки за дальністю, завдяки цьому вони завжди перебувають у бойовій готовності. Крім того, значно зростає стійкість стереодалекомірів до зовнішнього впливу, внаслідок чого підвищується точність визначення дальності.