

Обчислення оберненої геодезичної задачі за допомогою мікрокалькулятора мк-61, мк-52.
Програма для рішення ОГЗ для МК-52:
Крок |
Дія |
Код |
|
Крок |
Дія |
Код |
00 |
Пх 3 |
63 |
|
15 |
6 |
06 |
01 |
Пх 1 |
61 |
|
16 |
|
13 |
02 |
– |
11 |
|
17 |
Пх 9 |
69 |
03 |
В |
OE |
|
18 |
F x0 |
59 |
04 |
F х2 |
22 |
|
19 |
23 |
23 |
05 |
Пх 4 |
64 |
|
20 |
F |
25 |
06 |
Пх 2 |
62 |
|
21 |
БП |
51 |
07 |
– |
11 |
|
22 |
28 |
28 |
08 |
хП 9 |
49 |
|
23 |
F |
25 |
09 |
F х2 |
2 |
|
24 |
/–/ |
OL |
10 |
+ |
10 |
|
25 |
6 |
06 |
11 |
F
|
21 |
|
26 |
0 |
00 |
12 |
хП d |
4Г |
|
27 |
+ |
10 |
13 |
|
13 |
|
28 |
хП а |
4– |
14 |
F cos –1 |
1– |
|
29 |
с/п |
50 |

Порядок розв’язання
Ввести Хвп, натиснути хП 1 , ввести Yвп, натиснути хП 2 , ввести Хц, натиснути хП 3 , ввести Yц, натиснути хП 4
Після зупинки: зчитати значення , воно також зберігається в регістрі А.
Натиснути Пх d , зчитати значення Д.
Рішення ОГЗ за допомогою калькуляторів із вбудованими функціями перерахування полярних координат у прямокутні і навпаки здійснюється у такому порядку.
Увімкнути калькулятор.
Упевнитись, що калькулятор налаштований для роботи у градусній системі (не у радіанах і не у градах), – у верхній частині індикатора виведено DEG ( а не RAD і не GRAD).
Ввести Хц, натиснути – , ввести Хвп, натиснути = , хМ .
Ввести Yц, натиснути – , ввести Yвп, натиснути = .
Натиснути b .
Натиснути MR , натиснути а .
Натиснути 2ndF , а ; на дисплеї зчитати значення Д.
Натиснути b , , 6 , = , на дисплеї зчитати значення дирекційного кута у поділках кутоміра (великі поділки відокремлені від малих комою), при отриманні від’ємного значення додати до нього 60: натиснути + 6 0 = зчитати за дисплеї значення .
Обчислення дальності при її визначенні за допомогою короткої бази роблять за формулою
Д= в / tg , (4.22)
Обчислення проводять у такому порядку:
На обчислювачі СТМ |
На логарифмічній лінійці |
- встановлюють індекс движка по величині за шкалою 1 або 2; - обертанням рухомого круга встановлюють проти індексу движка значення В за шкалою 6; |
- встановлюють візирну лінію на величину бази за шкалою корпусу лінійки; - движком підводять під візирну лінію величину за шкалою tg або S і T; |
- суміщають індекс движка з нульовим радіусом основного круга, знімають дальність на шкалі 6 рухомого круга. |
- знімають за шкалою корпусу лінійки проти краю шкал движка дальності. |
Кількість цілих знаків у числі визначають виходячи з величини :
якщо встановлюють за шкалою tg логарифмічної лінійки (шкалою 1 обчислювача СТМ), то
 ;
;якщо встановлювали за шкалою S і Т логарифмічної лінійки (шкалою 2 обчислювача СТМ), то
 .
.
Приклад 1. Обчислити відстань АВ, якщо на одній із точок перпендикулярно до напрямку АВ відкладений допоміжний базис
в = 45 м, кут = 1-27,3 АВ = 45 / tg1-27,3 = 336 м.
Обчислення горизонтальної дальності по виміряній нахиленій дальності проводять за формулою
![]() ,
(4.23)
,
(4.23)
Розрахунки проводять у такому порядку:
На обчислювачі СТМ |
На логарифмічній лінійці |
- суміщають нульовий радіус рухомого круга з дальністю за шкалою 3;
-
встановлюють індекс движка на відлік
15- |
- встановлюють кінець шкал движка проти дальності за шкалою корпусу лінійки; - риску візира встановлюють на величину 15- за шкалою синусів і проти риски на шкалі чисел корпусу лінійки знімають дальність |
Приклад 2.
Обчислити горизонтальну відстань, якщо
дальність нахилу
![]() = 4870 м, а кут місця
= 1-85,
= 4870 м, а кут місця
= 1-85,
![]() м.
м.
Обробку результатів оберненої засічки по дирекційних кутах (рис.4.11), аналітичним методом проводять у такому порядку:
визначають прямокутні координати контурних точок (А і В) вирішенням зворотних геодезичних задач, обчислюють дирекційний кут
 і відстань ВА;
і відстань ВА;змінюють дирекційні кути
 і
і
 на 30-00 і обчислюють кути А і В:
на 30-00 і обчислюють кути А і В:
А =
![]() -
-![]() ,
В =
,
В =
![]() -
,
(4.24)
-
,
(4.24)
обчислюють кут
= - , (4.25)
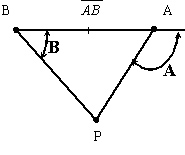
Рисунок 4.11 – Схема оберненої засічки за дирекційними кутами
обчислюють відстані від контурних точок до точки, координати якої визначають за формулами
![]() ,
,
![]() ,
(4.26)
,
(4.26)
вирішенням прямих геодезичних задач обчислюють координати точки Р стосовно точок А і В. Різниця в координатах не повинна перевищувати 20 м, якщо координати контурних точок взяті з каталогу (списку) координат геодезичних мереж, і 50 м, якщо координати визначались по карті масштабом не менше 1:50000.
За кінцеві координати точки беруть середнє арифметичне значення, якщо різниці у координатах точки не перевищують допустимих значень.