

26. Алгоритмы отсечения в пространстве объектов
Данный алгоритм относится к другой группе алгоритмов отсечения, так как работает в пространстве объектов. Для повышения эффективности (уменьшения количества шагов разбиения) осуществляется дробление окон вдоль границ многоугольника.
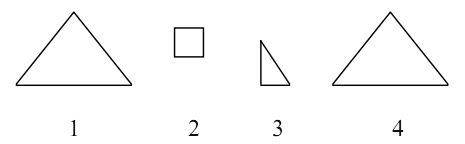
Алгоритм Вейлера-Азертона на одноименном двухмерном алгоритме. Трехмерный алгоритм реализуется за четыре этапа:
1) предварительная сортировка по глубине (z-сортировка);
2) сортировка многоугольников на плоскости (x,y-сортировка);
3) удаление экранированных многоугольников;
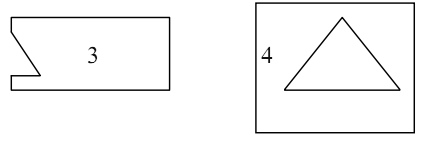
4) рекурсивное разбиение и окончательная сортировка при наличии неопределенности.
ЭТАП 1. Z-сортировка.
Н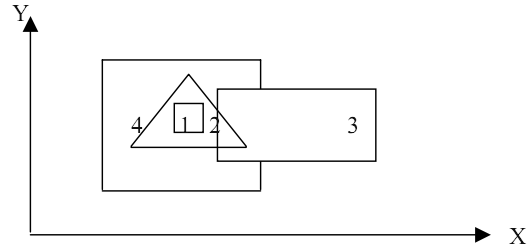 а
этом этапе происходит формирование
списка приблизительных приоритетов,
определяющего в первом приближении
удаленность многоугольников от
наблюдателя. Если за точку наблюдения
принимать z=+∞, то ближайший многоугольник
должен иметь максимальную z-координату.
Построение списка приблизительных
приоритетов осуществляется путем
сохранения z-координат для каждого из
многоугольников.
а
этом этапе происходит формирование
списка приблизительных приоритетов,
определяющего в первом приближении
удаленность многоугольников от
наблюдателя. Если за точку наблюдения
принимать z=+∞, то ближайший многоугольник
должен иметь максимальную z-координату.
Построение списка приблизительных
приоритетов осуществляется путем
сохранения z-координат для каждого из
многоугольников.
ЭТАП 2. X,Y-сортировка.
На данном этапе происходит сортировка в плоскости экрана. В результате создается два списка многоугольников:
А) внутренний (для многоугольников, попадающих в окно)
Б) внешний (для всех прочих).
Для отсечения используется копия ближайшего многоугольника, определенного на первом этапе.
Поскольку отсечение производится ближайшим многоугольником, то первым во внутреннем списке является он сам.
ЭТАП 3.
Н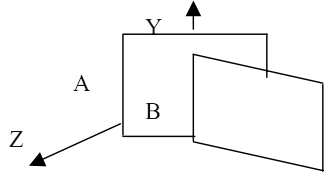 а
данном этапе выполняется полная проверка
координат многоугольников, учитывая
тот факт, что первоначальная z-сортировка
является приблизительной.
а
данном этапе выполняется полная проверка
координат многоугольников, учитывая
тот факт, что первоначальная z-сортировка
является приблизительной.
При выполнении проверки для каждой j-ой вершины i-ого многоугольника с координатами (Xij, Yij), отсекаемого ближайшим многоугольником, определяется глубина Zij. Затем Zij сравнивается с глубиной Zk ближайшего многоугольника, зафиксированного при z-сортировке. Если вычисленная величина Zij< Zk, то порядок, определенный z-сортировкой, правильный. В том случае, если Zij > Zk, то результат z-сортировки – ошибочен. В первом случае продолжается рекурсивная работа с внешним списком многоугольников. Во втором случае – необходим переход к четвертому этапу.
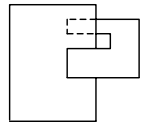
ЭТАП 4.
Необходимость в нем возникает в том случае, если среди Zij есть значение, большее Zk. Такой многоугольник, по крайней мере, частично экранирует ближайший многоугольник, определенный на первом этапе. Для устранения ошибки сортировки осуществляется рекурсивное разбиение X,Y-плоскости с использованием в качестве отсекающего того многоугольника, который нарушил правило сортировки по z-координате. Отсечению подлежат многоугольники из внутреннего списка, в том числе и старый ближайший многоугольник. Для отсечения используется копия нового претендента. Данный алгоритм обрабатывает случаи циклического перекрытия нескольких многоугольников.
Конец 26 вопроса.
27. Алгоритмы сортировки по глубине.
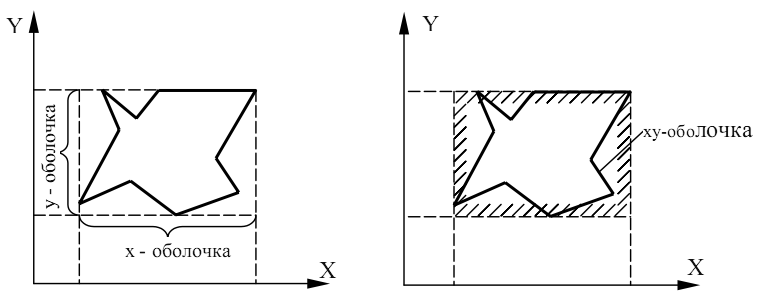
Данный алгоритм был предложен Ньюэллом и Санчем. При работе исполняется понятие оболочек геометрических объектов. В общем случае в качестве n - мерной оболочки подразумевается n - мерный параллелепипед, размеры которого соответствуют габаритным размерам исходного объекта.
Данный вариант алгоритма позволяет сортировать многоугольники по их Z – координатам и реализуется за три шага:
1) упорядочивание многоугольника по координате Z – max;
2) разрешение неопределенностей при перекрытии Z-оболочек;
3) преобразование многоугольников в растровую форму.
Для выполнения шага 2 исполняется тест, состоящий из 5 проверок.
Рассмотрим ситуацию, при которой в качестве ближайшего многоугольника на первом шаге выбран многоугольник P. Многоугольник имеющий перекрытие Z оболочек с многоугольником Р обозначаем Q.
Необходимо выполнить следующие пять проверок:
1) Х- оболочки не перекрываются;
2) У- оболочки не перекрываются;
3) многоугольник Р целиком за плоскостью Q;
4) многоугольник Q целиком перед плоскостью Р;
5) ХУ- оболочки многоугольников Р и Q не перекрываются.
Если во всех пяти случаях получается отрицательный ответ, то Р закрывает Q, в противном случае Q закрывает Р, поэтому в первоначальном списке многоугольники Р и Q необходимо поменять местами
Данный алгоритм не позволят обрабатывать в случае взаимного перекрытия объектов, этот вариант приводит к зацикливанию алгоритма

Для устранения данного недостатка осуществляется контроль за моментом возникновения зацикливания, для этого фиксируются многоугольники, входящие в список конфликтов.
Зацикливание образуется при повторном вхождении многоугольников в список. Для того чтобы разорвать подобный цикл, многоугольник, повторно возникший в этом списке, делят на две части, таким образом, чтобы не возникало конфликтов между многоугольниками. Данный алгоритм часто называют «алгоритмом художника». Егос ложность определяется Q (n2), где n – количество многоугольников.
Алгоритм сортировки по глубине использующий Z- буфер.
Принципиальное отличие от алгоритма Ньюэма- Санча заключа-ется в том, что Z координаты рассматриваются не для многоугольников, а для точек экрана. Для хранения Z координат используется буфер глубины или Z-буфер, который может представить из себя как часть ОП, так и специальный сегмент памяти, принадлежащей графической подсистеме ПК. Перед началом работы алгоритма выполняются следующие операции:
1) в видео буфер заносится изображение фона;
2) в Z-буфер заносится максимальное значение Zmax.
Затем каждый многоугольник раскладывается в растр и записывается в видео буфер без сортировки по глубине. При разложении в растр для каждой точки i-ого многоугольника c координатами (x,y) выполняются следующие действия:
- вычисление глубины i-ого многоугольника – точки Zi (x,y);
- в том случае, если рассчитанное значение Zi(x,y) < Zбуф(x,y), то цвет многоугольника заносится в точку (x,y) видеобуфера. В противном случае изменения видеобуфера не происходит и осуществляется переход к следующей точке.
Таким образом, после обработки всех многоугольников сцены в Z-буфере оказываются координаты ближайших к наблюдателю объектов. Единственной трудоемкой операцией является вычисление Z-координат многоугольника по координатам (x,y). Однако если рассматривать эту операцию более детально, то и ее трудоемкость можно значительно снизить.
Для вычисления Z(x,y) используется формула Ax+By+Cz+D=O отсюда: Z(x,y) = - (Ax+By+D)/C, т.к. развертка идет вдоль строк, то полное вычисление Z координат можно производить один раз на строку растра. Остальные значения вычисляются как Z(x+Ux,y): Z = Z1 + A*Ux/C. Таким образом, при отображении очередного пиксела растра необходима одна операция вычитания.
Достоинство. Простота алгоритма, что с одной стороны позволяет выполнить его аппаратную реализацию, а с другой стороны позволяет достичь высокого быстродействия.
Недостаток. Необходимость значительного объема буфера глубины.
Область применения:
1) мультимедийные игровые программы;
2) аппаратная реализация 3D-ускорителя, предназначенного для бытовых/игровых ПК.
При практической реализации алгоритма 3D-отсечения возникают ситуации, в которых необходимо использовать достоинства отдельных алгоритмов. Поэтому на практике используются не отдельные классические алгоритмы 3D-отсечения, а их комбинации. Причем алгоритмы, ориентированные на пространство объектов, могут быть реализованы в пространстве изображений и наоборот.
Конец 27 вопроса.