

32. Прямая в пространстве как линия пересечения двух пл-тей. Канонические и параметрические ур-ия. Ур-ия прямой, проходящей через две заданные точки.
Прямую линию в пространстве можно задавать как линию пересечения двух различных и не параллельных плоскостей: . Любой ненулевой вектор, параллельный данной прямой называется направляющим вектором этой прямой. Найдём уравнение прямой, проходящей через данную точку M1(x1,y1,z1), и имеющей заданный направляющий вектор q={l,m,n}. Очевидно, точка M(x,y,z) лежит на указанной прямой тогда и только тогда, когда вектор и q={l,m,n} коллинеарны, т.е. тогда и только тогда, когда координаты этих векторов пропорциональны: (1). Это и есть искомое уравнение прямой, называемое каноническим уравнением прямой. Запишем уравнение прямой, проходящей через две данные отличные друг от друга точки M1(x1,y1,z1) и M2(x2,y2,z2). За направляющий вектор и, учитывая, что прямая проходит через точку M1(x1,y1,z1), из канонического уравнения (1) получим уравнение искомой прямой в виде . Примем за параметр t= , т.е. , следовательно, . Это уравнение называется параметрическим уравнением прямой.
33. Угол между прямыми в пространстве. Условия параллельности и перпендикулярности прямых. Исследование взаимного расположения двух прямых в пространстве.
Пусть
две прямые в пространстве L1
и L2
заданы своими каноническими уравнениями
 и
и
 .
Т.к. направляющими векторами прямых L1
L2
служат векторы q1={l1,m1,n1}
b
q2={l2,m2,n2},
то задача об определении угла между L1
и L2
сводится к определению угла φ между
векторами q1
и q2.
.
Т.к. направляющими векторами прямых L1
L2
служат векторы q1={l1,m1,n1}
b
q2={l2,m2,n2},
то задача об определении угла между L1
и L2
сводится к определению угла φ между
векторами q1
и q2.
Из
определения скалярного произведения
 и из выражения в координатных длин
векторов q1
и q2
и их скалярного произведения получим
формулу для определения угла φ между
прямыми L1
и L2:
и из выражения в координатных длин
векторов q1
и q2
и их скалярного произведения получим
формулу для определения угла φ между
прямыми L1
и L2:
 (1).
Условие
параллельности прямых
L1
и L2
эквивалентно условию коллинеарности
векторов q1
и q2,
заключается в пропорциональности
координат этих векторов, т.е.
(1).
Условие
параллельности прямых
L1
и L2
эквивалентно условию коллинеарности
векторов q1
и q2,
заключается в пропорциональности
координат этих векторов, т.е. .
Условие
перпендикулярности прямых
L1
и L2
вытекает из формулы (1) (при cosφ=0)
т.е. l1l2+m1m2+n1n2=0.
.
Условие
перпендикулярности прямых
L1
и L2
вытекает из формулы (1) (при cosφ=0)
т.е. l1l2+m1m2+n1n2=0.
Исследование взаимного расположения двух прямых в пространстве.
Две прямые в пространстве могут 1)пересекаться; 2)быть параллельными; 3)скрещиваться. Если прямые пересек .или парал-ны ,то они лежат в одной плоскости.
Выведем усл. принадл. двух прямых одной пл-ти.
L1: q1={
q1={ }
M1={
}
M1={ }
}
L2: q2={
q2={ }
M2={
}
M2={ }
}
Для
того, чтобы две прямые лежали в одной
пл-ти, необходимо и достаточно, чтобы
 M1M2,
q1q2-комплонарны,
M1M2={x2-x1,y2-y1,
z2-z1},тогда
M1M2*q1*q2=0
M1M2,
q1q2-комплонарны,
M1M2={x2-x1,y2-y1,
z2-z1},тогда
M1M2*q1*q2=0
 =0
Для того, чтобы прямые пересекались,
они должны лежать в одной пл-ти, т.е.
должно вып-ся одно из условий:
=0
Для того, чтобы прямые пересекались,
они должны лежать в одной пл-ти, т.е.
должно вып-ся одно из условий:

34. Исследование взаимного расположения прямой и плоскости.
п.4. Взаимное расположение прямой и плоскости в пространстве.
Прямая может лежать на данной плоскости, быть параллельна данной плоскости или пересекать ее в одной точке, см. следующие рисунки.
рис.6.

рис.7.

рис.8.
Теорема.
Пусть плоскость ![]() задана
общим уравнением
задана
общим уравнением
![]() ,а
прямая L задана каноническими уравнениями
,а
прямая L задана каноническими уравнениями
![]() или
параметрическими уравнениями
или
параметрическими уравнениями

![]() ,
,
в
которых ![]() – координаты нормального вектора плоскости
,
– координаты нормального вектора плоскости
, ![]() –
координаты
произвольной
фиксированной точки прямой L,
–
координаты
произвольной
фиксированной точки прямой L, ![]() –
–
координаты направляющего вектора прямой L. Тогда:
1)
если ![]() ,
то прямая L пересекает плоскость
в
точке, координаты которой
,
то прямая L пересекает плоскость
в
точке, координаты которой ![]() можно
найти из системы уравнений
можно
найти из системы уравнений
 ;
(7)
;
(7)
2)
если ![]() и
и ![]() ,
то прямая лежит на плоскости;
,
то прямая лежит на плоскости;
3)
если
и ![]() ,
то прямая параллельна плоскости.
,
то прямая параллельна плоскости.
Доказательство.
Условие ![]() говорит
о том, что вектроры
говорит
о том, что вектроры ![]() и
и ![]() не
ортогональны, а значит прямая не
параллельна плоскости и не лежит в
плоскости, а значит пересекает ее в
некоторой точке М. Координатыточки
М удовлетворяют как уравнению плоскости,
так и уравнениям прямой, т.е. системе
(7). Решаем первое уравнение системы (7)
относительно неизвестной t и затем,
подставляя найденное значение t в
остальные уравнения системы,
находим координаты искомой
точки.
не
ортогональны, а значит прямая не
параллельна плоскости и не лежит в
плоскости, а значит пересекает ее в
некоторой точке М. Координатыточки
М удовлетворяют как уравнению плоскости,
так и уравнениям прямой, т.е. системе
(7). Решаем первое уравнение системы (7)
относительно неизвестной t и затем,
подставляя найденное значение t в
остальные уравнения системы,
находим координаты искомой
точки.
Если ![]() ,
то это означает, что
,
то это означает, что ![]() .
А такое возможно лишь тогда, когда прямая
лежит на плоскости или параллельна ей.
Если прямая лежит на плоскости, то любая
точка прямой является точкой плоскости
и координаты любой
точки прямой удовлетворяют уравнению
плоскости. Поэтому достаточно проверить,
лежит ли на плоскости точка
.
Если
,
то точка
.
А такое возможно лишь тогда, когда прямая
лежит на плоскости или параллельна ей.
Если прямая лежит на плоскости, то любая
точка прямой является точкой плоскости
и координаты любой
точки прямой удовлетворяют уравнению
плоскости. Поэтому достаточно проверить,
лежит ли на плоскости точка
.
Если
,
то точка ![]() –
лежит на плоскости, а это означает, что
и сама прямая лежит на плоскости.
–
лежит на плоскости, а это означает, что
и сама прямая лежит на плоскости.
Если , а , то точка на прямой не лежит на плоскости, а это означает, что прямая параллельна плоскости.
35. Эллипс. Определение, каноническое уравнение, исследование формы.
 -каноническое
ур-е эллипсоида. . Если эллипсоид задан
своим каноническим ур-ем, то оси Ox,
Oy,
Oz
называются его главными
осями
Координатные
плоскости являются плоскостями
симметрии эллипсоида, а начало координат
— центром симметрии.
-каноническое
ур-е эллипсоида. . Если эллипсоид задан
своим каноническим ур-ем, то оси Ox,
Oy,
Oz
называются его главными
осями
Координатные
плоскости являются плоскостями
симметрии эллипсоида, а начало координат
— центром симметрии.
Из уравнения (1) вытекает, что координатные плоскости являются плоскостями симметрии эллипсоида, а начало координат — центром симметрии. Числа а, b, с называются полуосями эллипсоида и представляют собой длины отрезков, от начала координат до точек пересечения эллипсоида с осями координат. Чтобы более наглядно представить себе форму эллипсоида, выясним форму линий пересечения его плоскостями, параллельными какой-либо из координатных плоскостей.
Ради определенности рассмотрим линии Lh пересечения эллипсоида с плоскостями z = h параллельными плоскости Оху. Уравнение проекции L*h линии Lh на плоскость Оху получается из уравнения (1), если положить в нем z = h. Таким образом, уравнение этой проекции имеет вид
 (2)
Если положить
(2)
Если положить
 (3), то уравнение (2) можно записать в виде
(3), то уравнение (2) можно записать в виде
 (4),
т. е. L*h
представляет
собой эллипс с полуосями а* и b*, которые
могут быть вычислены по формулам (3). Так
как Lh
получается «подъемом» L*h
на высоту h по оси Оz
, то и Lh
представляет собой эллипс.
(4),
т. е. L*h
представляет
собой эллипс с полуосями а* и b*, которые
могут быть вычислены по формулам (3). Так
как Lh
получается «подъемом» L*h
на высоту h по оси Оz
, то и Lh
представляет собой эллипс.
Представление об эллипсоиде можно получить следующим образом. Рассмотрим на плоскости Оху семейство эллипсов (4), полуоси а* и b* которых зависят от h, и каждый такой эллипс снабдим отметкой h, указывающей, на какую высоту по оси Оz должен быть «поднят» этот эллипс. Мы получим своего рода «карту» эллипсоида. Используя эту «карту», легко представить себе пространственный вид эллипсоида.
Эллипсоид
может быть получен равномерным сжатием
сферы относительно двух перпендикулярных
плоскостей. Пусть a
- наибольшая ось эллипсоида. Сл-но, он
может быть получен из сферы
 равномерным сжатием сначала относительно
пл-ти Oxy
с коэф-том сжатия
равномерным сжатием сначала относительно
пл-ти Oxy
с коэф-том сжатия
 ,
а затем относительно пл-ти Oxz
с коэф-том
,
а затем относительно пл-ти Oxz
с коэф-том
 .
.
Если все 3 величины a, b, c различны то эллипсоид называется трехосным. Если какие-либо две из величин a, b, c равны между совой, то соответствующий главный эллипс обращается в окружность. Поэтому такой эллипсоид может быть получен вращением любого его сечения. Такой эллипсоид называется эллипсоидом вращения.
36. Гипербола. Определение, каноническое уравнение, исследование формы.
Каноническое уравнение гиперболы
 Гиперболой
называется множество всех точек
плоскости, модуль разности расстояний
от каждой из которых до двух данных
точек этой плоскости, называемых
фокусами, есть величина постоянная,
меньшая, чем расстояние между фокусами.
Гиперболой
называется множество всех точек
плоскости, модуль разности расстояний
от каждой из которых до двух данных
точек этой плоскости, называемых
фокусами, есть величина постоянная,
меньшая, чем расстояние между фокусами.
Обозначим
фокусы через ![]() и
и ![]() ,
,
расстояние между ними через 2с, а модуль разности расстоя ний от каждой точки гиперболы до фокусов через 2а. По определению 2а < 2с, т. е. а < с.
Для
вывода уравнения гиперболы выберем си-
стему координат Оху так, чтобы
фокусы
и
лежали
на оси Ох, а начало координат совпало с
серединой отрезка ![]() (см.
рис. 31). Тогда фокусы будут иметь координаты
.
(см.
рис. 31). Тогда фокусы будут иметь координаты
.![]() и
и ![]() .
.
Пусть
М(x;y) — произвольная точка гиперболы.
Тогда согласно опре делению гиперболы ![]() или
или ![]() ,
т.е.
,
т.е. ![]() .
После упрощений, как это было сделано
при выводе уравнения эллипса, получим
каноническое уравне ние гиперболы
.
После упрощений, как это было сделано
при выводе уравнения эллипса, получим
каноническое уравне ние гиперболы
![]() где
где
![]()
Гипербола есть линия второго порядка.
Исследование формы гиперболы по ее уравнению
Установим форму гиперболы, пользуясь ее каноническим уравнением.
1. Уравнение (11.9) содержит х и у только в четных степенях. Следовательно, гипербола симметрична относительно осей Ох и Оу, а также относительно точки О(0;0), которую называют центром гиперболы.
2.
Найдем точки пересечения гиперболы с
осями координат. Положив у = 0 в уравнении
(11.9), находим две точки пересечения
гиперболы с осью Ox: ![]() и
и ![]() .
Положив х = 0 в (11.9), получаем
.
Положив х = 0 в (11.9), получаем ![]() ,
чего быть не может. Следовательно,
гипербола ось Оу не пересекает.
,
чего быть не может. Следовательно,
гипербола ось Оу не пересекает.
Точки
и
называются
вершинами гиперболы, а отрезок ![]() —
действительной осью, отрезок
—
действительной осью, отрезок ![]() -действительной
полуосью гиперболы.
-действительной
полуосью гиперболы.
Отрезок ![]() ,
соединяющий точки
,
соединяющий точки ![]() и
и ![]() называется
мнимой осью, число b — мнимой полуосью.
Прямоугольник со сторонами 2а и 2Ь
называется основным прямоугольником
гипер болы. .
называется
мнимой осью, число b — мнимой полуосью.
Прямоугольник со сторонами 2а и 2Ь
называется основным прямоугольником
гипер болы. .
3.
Из уравнения (11.9) следует, что
уменьшаемое ![]() не
меньше единицы, т. е. что
не
меньше единицы, т. е. что ![]() или
или ![]() .
Это означает, что точки гиперболы
расположены справа от прямой х = а (правая
ветвь гиперболы) и слева от прямой х =
—а (левая ветвь гиперболы).
.
Это означает, что точки гиперболы
расположены справа от прямой х = а (правая
ветвь гиперболы) и слева от прямой х =
—а (левая ветвь гиперболы).
Рис. 32
4.
Из уравнения (11.9) гиперболы видно, что
когда ![]() возрастает,
то и \у\ воз растает. Это следует из
того,что разность
возрастает,
то и \у\ воз растает. Это следует из
того,что разность ![]() сохраняет
постоянное значение, равное единице.
сохраняет
постоянное значение, равное единице.
Из сказанного следует, что гипербола имеет форму, изображенную на рисунке 32 (кривая, состоящая из двух неограниченных ветвей).
Асимптоты гиперболы
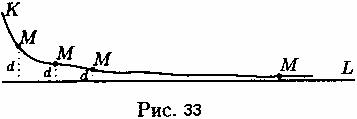
Прямая L называется асимптотой неограниченной кривой К, если расстояние d от точки М кривой К до этой прямой стремится к нулю при неограниченном удалении точки М вдоль кривой К от начала координат. На рисунке 33 приведена иллюстрация понятия асимптоты: прямая L является асимптотой для кривой К.
Покажем,
что гипербола ![]() имеет
две асимптоты:
имеет
две асимптоты:
![]() и
и ![]()
Так как прямые (11.11) и гипербола (11.9) симметричны относительно координатных осей, то достаточно рассмотреть только те точки указанных линий, которые расположены в первой четверти.
Возьмем
на прямой
точку
N имеющей ту же абсциссу х, что и точка ![]()
 на
гиперболе
на
гиперболе ![]() (см.
рис. 34), и найдем разность MN между ордина
тами прямой и ветви гиперболы:
(см.
рис. 34), и найдем разность MN между ордина
тами прямой и ветви гиперболы:
![]()
 Как
видно, по мере возрастания X знаменатель
дроби увеличивается; чи слитель — есть
постоянная величина. Стало быть, длина
отрезка MN стремится к нулю. Так как MN
боль ше расстояния d от точки М до пря
мой, то d и подавно стремится к ну лю.
Итак, прямые
Как
видно, по мере возрастания X знаменатель
дроби увеличивается; чи слитель — есть
постоянная величина. Стало быть, длина
отрезка MN стремится к нулю. Так как MN
боль ше расстояния d от точки М до пря
мой, то d и подавно стремится к ну лю.
Итак, прямые ![]() являются
асимптотами гиперболы (11.9).
являются
асимптотами гиперболы (11.9).
При
построении гиперболы (11.9) целесообразно
сначала построить ос новной прямоугольник
гиперболы (см. рис. 35), провести прямые,
проходя щие через противоположные
вершины этого прямоугольника, — асимптоты
гиперболы и отметить вершины ![]() и
и ![]() гиперболы.
гиперболы.
37. Эксцентриситет и директрисы эллипса и гиперболы.
Эллипсом называется геометрическое место точек плоскости, для которых сумма расстояний до двух фиксированных точек F1 , F2 плоскости, называемых фокусами, есть величина постоянная.
Э ксцентриситетом
эллипса называется величина
ксцентриситетом
эллипса называется величина
 .
Директрисой
Di
(i=1,2)
эллипса, отвечающей фокусу Fi
(i=1,2)
называется прямая, расположенная в
полуплоскости
.
Директрисой
Di
(i=1,2)
эллипса, отвечающей фокусу Fi
(i=1,2)
называется прямая, расположенная в
полуплоскости
 (i=1,2)
перпендикулярно большой оси эллипса
на расстоянии
(i=1,2)
перпендикулярно большой оси эллипса
на расстоянии
 от центра. Уравнения директрис эллипса
в канонической системе координат имеют
вид: D1,2
: х=
от центра. Уравнения директрис эллипса
в канонической системе координат имеют
вид: D1,2
: х= .
.
Директрисы эллипса.
Определение. Директрисами эллипса называются две прямые, которые в канонической для эллипса системе координат имеют уравнения
![]() или
или ![]() .
(13)
.
(13)
 рис.8.
рис.8.
Теорема.
Пусть М – произвольная точка эллипса, ![]() ,
, ![]() –
ее фокальные радиусы,
–
ее фокальные радиусы, ![]() – расстояние от
точки М до левой директрисы,
– расстояние от
точки М до левой директрисы, ![]() –
до правой. Тогда
–
до правой. Тогда
![]() (14), где
(14), где ![]() – эксцентриситет эллипса.
– эксцентриситет эллипса.
Доказательство.
 рис.9.
рис.9.
Пусть
М(х, у) – координаты произвольной
точки эллипса. Тогда
![]() ,
,
![]() ,
откуда и следуют равенства (14). Теорема
доказана.
,
откуда и следуют равенства (14). Теорема
доказана.
Определение. Отношение ![]() называется эксцентриситетом гиперболы,
где с –
называется эксцентриситетом гиперболы,
где с –
половина расстояния между фокусами, а – действительная полуось. С учетом того, что с2 – а2 = b2:
![]()
![]() Если
а=b,
e=
Если
а=b,
e=![]() ,
то гипербола называется равнобочной
(равносторонн
,
то гипербола называется равнобочной
(равносторонн
Определение. Директрисами гиперболы называются две прямые,уравнения которых в канонической для гиперболы системе координатимеют вид
.
Так
как ![]() ,
то
,
то ![]() .
.
Обозначение. Расстояние между директрисами обозначается 2d и равно
![]() .
.
рис.8.
Теорема. Для любой точки гиперболы отношение ее фокального радиуса к расстоянию до соответствующей директрисы есть величина постоянная равная эксцентриситету:
. (7)
Доказательство. При выводе канонического уравнения гиперболы мы получили формулы для вычисления фокальных радиусов точки гиперболы с координатами М(х, у):
![]() ,
, ![]() ,
,
где числа х, ![]() и
и ![]() имеют
одинаковые знаки.
имеют
одинаковые знаки.
Из
рисунка 8 мы видим, что при ![]()
![]()
![]() ,
, ![]() ,
,
![]() ,
, ![]() ,
,
откуда
и следуют равенства (7). Аналогично
доказываются формулы (7) и при ![]() .
.
Теорема доказана.
38. Парабола. Определение, каноническое уравнение, исследование формы.
Каноническое уравнение параболы
Параболой
называется множество всех
точек плоскости, каждая из которых
одинаково удалена от данной точки,
называемой фокусом, и данной прямой,
называемой директрисой. Расстояние от
фокуса F до директрисы называется
параметром параболы и обозначается
ч ерез
p (p > 0).
ерез
p (p > 0).
Для вывода уравнения параболы выберем систему координат Оху так, чтобы ось Ох проходила через фокус F перпендикулярно директрисе в направлении от директрисы к F, а начало координат О расположим посередине между фокусом и директри сой (см. рис. 60). В выбранной системе фокус F имеет координаты (p/2;0), а уравнение директрисы имеет вид x=-p/2 , или x+p/2=0.
Пусть M(x;y) — произвольная точка параболы. Соединим точку Μ с F. Проведем отрезок ΜΝ пер пендикулярно директрисе. Согласно определению параболы MF = ΜΝ. По формуле расстояния между двумя точками на ходим:

Следовательно,
 Возведя
обе части уравнения в квадрат, получим
Возведя
обе части уравнения в квадрат, получим
![]() т. е.
т. е.
![]() (11.13)
(11.13)
Уравнение (11.13) называется каноническим уравнением параболы. Парабола есть линия второго порядка.
И сследование
форм параболы по ее уравнению
сследование
форм параболы по ее уравнению
1. В уравнении (11.13) переменная у входит в четной степени, значит, парабола симметрична относительно оси Ох; ось Ох является осью сим метрии параболы.
2.
Так как ρ > 0, то из (11.13) следует, что ![]() .
Следовательно, парабола рас положена
справа от оси Оу.
.
Следовательно, парабола рас положена
справа от оси Оу.
3. При имеем у = 0. Следователь но, парабола проходит через начало коор динат.
4.
При неограниченном возрастании x модуль
у также неограниченно возраста ет.
Парабола ![]() имеет
вид (форму), изображенный на
рисунке 61. Точ ка О(0; 0) называется вершиной
параболы, отрезок FM = r называется
фокальным радиусом точки М.
имеет
вид (форму), изображенный на
рисунке 61. Точ ка О(0; 0) называется вершиной
параболы, отрезок FM = r называется
фокальным радиусом точки М.
Уравнения ![]() ,
, ![]() ,
, ![]() (p>0)
также определяют параболы, они изображены
на рисунке 62
(p>0)
также определяют параболы, они изображены
на рисунке 62
Нетрудно
показать, что график квадратного
трехчлена ![]() ,
где
,
где ![]() ,
B и С любые действительные числа,
представляет собой параболу в смысле
приведенного выше ее определения.
,
B и С любые действительные числа,
представляет собой параболу в смысле
приведенного выше ее определения.
39. Поверхности второго порядка. Канонические уравнения. Вид поверхностей.
Определение 12.1. Поверхностью второго порядка называется множество точек трехмерного пространства, декартовы координаты которых удовлетворяют уравнению вида:
![]() - (12.1)
- (12.1)
уравнению второй степени от трех неизвестных, называемому общим уравнением поверхности второго порядка.
Если
найти собственные числа и нормированные
собственные векторы матрицы квадратичной
формы ![]() и
перейти к системе координат, определяемой
базисом из ортонормированных собственных
векторов, уравнение (12.1) можно привести
к одному из следующих видов:
и
перейти к системе координат, определяемой
базисом из ортонормированных собственных
векторов, уравнение (12.1) можно привести
к одному из следующих видов:
1. Если λ1, λ2, λ3 – одного знака, уравнение (12.1) есть уравнение эллиптического типа и приводится к канонической форме:
а) ![]() - (12.2)
- (12.2)
каноническое уравнение эллипсоида.
Замечание, Если два собственных числа совпадают, эллипсоид называется эллипсоидом вращения и представляет собой поверхность, полученную в результате вращения эллипса вокруг одной из его осей. Если все собственные числа равны, уравнение (12.2) становится уравнением сферы.
б) ![]() - (12.3)
- (12.3)
уравнение задает точку в пространстве;
в) ![]() - (12.4)
- (12.4)
пустое множество.
2. Если собственные числа разных знаков, уравнение (12.1) приводится к каноническому виду:
а) ![]() - каноническое
уравнение однополостного
гиперболоида, (12.5)
- каноническое
уравнение однополостного
гиперболоида, (12.5)
б) ![]() - (12.6)
- (12.6)
- каноническое уравнение двуполостного гиперболоида,
в) ![]() - (12.7)
- (12.7)
уравнение конуса второго порядка.
3. Одно из собственных чисел равно 0. При этом с помощью преобразований координат можно получить следующие формы уравнения (12.1):
а) ![]() - (12.8)
- (12.8)
каноническое уравнение эллиптического параболоида,
б) ![]() - (12.9)
- (12.9)
каноническое уравнение гиперболического параболоида
и уравнения цилиндрических поверхностей:
в) ![]() - эллиптический
цилиндр, (12.10)
- эллиптический
цилиндр, (12.10)
г) ![]() - гиперболический
цилиндр. (12.11)
- гиперболический
цилиндр. (12.11)
Наконец, уравнение может определять пару плоскостей:
д) ![]() . (12.12)
. (12.12)
4. Если два собственных числа равны 0, уравнение (12.1) приводится к одному из следующих видов:
а) ![]() - параболический
цилиндр, (12.13)
- параболический
цилиндр, (12.13)
б) ![]() - пара
параллельных
плоскостей, (12.14)
- пара
параллельных
плоскостей, (12.14)
в) ![]() -
пустое множество.
-
пустое множество.
40. Линейные векторные пространства. Определение и примеры.
Опр.
Мн-во R
эл-в x,
y,
z…наз.
век-м или лин-м прост-м, если для любых
двух эл-в x,
y
из этого пр-ва опред. сумма x+y,
кот-я тоже принадлежит R
и любые числа
 опр.
опр.
 причём вып-ся след. усл.: 1) x+y=y+x
для любого x,y,z
принадл. R;
причём вып-ся след. усл.: 1) x+y=y+x
для любого x,y,z
принадл. R;
2) (x+y)+z=x+(y+z);
3)
сущ. 0 такой
что x+0=x;
такой
что x+0=x;
4)
 сущ. противоп. (-x)
такой что x+(-x)=0;
сущ. противоп. (-x)
такой что x+(-x)=0;
5) 1x=x;
6) ;
;
7) ;
;
8)
 .
.
Примеры: множество решений однородной системы уравнений, множество векторов из начала координат.
41. Понятия линейной зависимости и линейной независимости системы векторов, размерность и базис векторного пространства. Единственность разложения вектора по базису. Координаты вектора в данном базисе.
Выражение вида λ1*A1+λ2*A2+...+λn*An называется линейной комбинацией векторов A1, A2,...,Anс коэффициентами λ1, λ2,...,λn.
Система векторов A1, A2,...,An называется линейно зависимой, если существует ненулевой набор чисел λ1, λ2,...,λn, при котором линейная комбинация векторов λ1*A1+λ2*A2+...+λn*Anравна нулевому вектору, то есть система уравнений: A1x1+A2x2+...+Anxn = Θ имеет ненулевое решение. Набор чисел λ1, λ2,...,λn является ненулевым, если хотя бы одно из чисел λ1, λ2,...,λn отлично от нуля.
Система векторов A1, A2,...,An называется линейно независимой, если линейная комбинация этих векторов λ1*A1+λ2*A2+...+λn*An равна нулевому вектору только при нулевом наборе чисел λ1,λ2,...,λn, то есть система уравнений: A1x1+A2x2+...+Anxn = Θ имеет единственное нулевое решение.
Базисом системы векторов A1 , A2 ,..., An называется такая подсистема B1, B2 ,...,Br (каждый из векторов B1,B2,...,Br является одним из векторов A1 , A2 ,..., An), которая удовлетворяет следующим условиям:
1. B1,B2,...,Br линейно независимая система векторов;
2. любой вектор Aj системы A1 , A2 ,..., An линейно выражается через векторы B1,B2,...,Br , где r - число векторов входящих в базис.
РАЗМЕРНОСТЬ ВЕКТОРНОГО ПРОСТРАНСТВА — максимальное число линейно-независимых векторов в векторном (линейном) пространстве. Если это число конечно, то пространство называется конечномерным (многомерным). В противном случае — бесконечномерным. Точки на прямой действительных чисел образуют одномерное пространство.
Определение Если
в линейном пространстве ![]() существует
существует ![]() линейно
независимых векторов, а любые
линейно
независимых векторов, а любые ![]() векторов
линейно зависимы, то линейное
пространство
называется
векторов
линейно зависимы, то линейное
пространство
называется ![]() мерным.
Число
называется
размерностью пространства и обозначается
мерным.
Число
называется
размерностью пространства и обозначается ![]() .
.
Определение
8. Если
,
то система из
линейно
независимых векторов ![]() ,
заданных в определенном порядке,
называется базисом пространства
.
,
заданных в определенном порядке,
называется базисом пространства
.
Теорема.
Если
,
-
базис в
,
то любой вектор ![]() можно
единственным образом разложить по
базису, т.е. представить в виде линейной
комбинации базисных векторов:
можно
единственным образом разложить по
базису, т.е. представить в виде линейной
комбинации базисных векторов: ![]() ,
, ![]() .
.
Доказательство.
Из определенной размерности и базиса
вытекает, что векторы
, ![]() -
линейно зависимы, а векторы
-
линейно независимы. Поэтому в силу
свойства 4 линейной зависимости
векторов
является
линейной комбинацией
:
-
линейно зависимы, а векторы
-
линейно независимы. Поэтому в силу
свойства 4 линейной зависимости
векторов
является
линейной комбинацией
:
.
Покажем
единственность разложения. Предположим
противное, т.е. пусть есть по крайней
мере два разложения: ![]() и,
например,
и,
например, ![]() ,
т.е.
,
т.е. ![]() .
.
Тогда ![]()
и векторы получаются линейно зависимыми, полученное противоречие и доказывает единственность разложения вектора по базису . Теорема доказана.
Числа ![]() называются
координатами вектора в базисе
.
Будем писать
называются
координатами вектора в базисе
.
Будем писать ![]() .
.
Если
,![]() ,
то
,
то
1) ![]() ;
;
2) ![]() ;
;
3) ![]() .
.
Набор
из
координат ![]() можем
считать вектором арифметического
пространства
можем
считать вектором арифметического
пространства ![]() .
.
42. Матрица перехода от одного базиса линейного векторного пространства к другому. Преобразование координат вектора.
е1,е2,…еn – старый базис
е1’,е2’,…еn’ – новый базис
т.к.
любой вектор может быть разложен по
базису и
вектора нового базиса выравниваются
через вектора старого базиса .
.
 называется
матрицей перехода от старой к новому
базису det
A0.
если det
A=0
rgA<n
все n
столбцы матрицы А ЛЗ
ЛЗ е1,е2,…еn
это
базис.
называется
матрицей перехода от старой к новому
базису det
A0.
если det
A=0
rgA<n
все n
столбцы матрицы А ЛЗ
ЛЗ е1,е2,…еn
это
базис.
Матрицей перехода может служить любая квадратная матрица порядка n , определитель которой 0
Рассмотрим связь между координатами одного итого же вектора в старом и новом базисе.
 -разложение
по старому базису
-разложение
по старому базису
в силу единственности разложения по базису мы можем сделать так:
 -это
есть выражение старых координат через
новые
-это
есть выражение старых координат через
новые
т.об старые координаты выр-ся через новые с помощью той же матрицы перехода, только коэффициенты разложения представляют строки этой матрицы.
43. Евклидовы пространства, определение. Длина вектора, угол между векторами в евклидовом пространстве. Ортогональность векторов. Неравенства Коши-Буняковского и треугольника.
опр. в некотором пространстве R задано скалярное произведение если к каждой паре в-ов x, y R поставлено в соответствие некоторое число (x,y), удовлетворяющее условие
(x,y)= (у,х)
(αx,y)= α(x,y)
(x+y,z)=(x,z)+(y,z)
В.П. в котором выполняются эти условия наз-ся пространсво со скалярным произведением если добавим
4) (х,х)≥0,хR (х,х)=0х=0
тогда В.П. наз-ся евклидовым
Пример 1: если в В.П. R задан базис в-р х = (х1,х2,…хn), y=(y1,y2,…yn)(x,y)=x1y1+x2y2+…+xnyn
Пример2:
Опр. длинной или модулем или нормой в-ра xR наз-ся корень квадратный из его скалярного квадрата

Опр. если ск-ное произведение в-ов (х,у)=0 то такие в-ры наз-ся ортогональными
Утв.в любом в-ом прос-ве со скалярным произ-ем справедлива так называемая теорема Пифагора: для любых двух ортогональных в-ов х и у справедливо р-во

док-во:
 ,т.к.
,т.к.

утв. В любом евклидовом пространстве справедливо нер-во Коши –Буняковского
модуль- -длины
-длины
док-во:для любого вещественного числа α мы имеем (благодаря свойству 4)

 т.к
выр-ние слева всегда должно быть > 0,
то этот квадратный трёхчлен не может
иметь двух различных действительных
корней,D≤0
т.к
выр-ние слева всегда должно быть > 0,
то этот квадратный трёхчлен не может
иметь двух различных действительных
корней,D≤0

очевидно, что нер-во переходит в равенство когда x = α*y, т.е. когда в-ра х и у пропорциональны

пример1(возвращаемся)
 тогда
в этом случае
тогда
в этом случае

пример2:
неравенство треугольника:
в любом евклидовом пространстве справедливо треугольника

Док-во: возведём в квадрат

44. Ортонормированный базис в евклидовом пространстве. Процесс ортогонализации.
Опр. Базис e1, e2, …,en n-мерного Евклидова пр-ва R наз-ся ортогональным, если выполняется (ei,ek)=0, ik.
Если, кроме того, |ei|=1, i=(1,n), то ортонормированным.
Лемма. Попарно ортогональные и 0 векторы Л.Н.
Док-во: Пусть x1,x2,…,xm – попарно ортогон. и 0, т.е. (xi,xk)=0, ik, |xi|0.
(1x1+…+ixi+…+mxm=0) |xi
Умножим обе части скалярного рав-ва на xi.
1 (x1, x1)+…+i(xi, xi)+…+m (xm, xm)=0
=0 0 =0
i(xi, xi)=0, (xi, xi)0 i=0, i=(1,n) 1=2=…=m=0
x1, x2,…,xm – Л.Н.
Теорема. В евклид. пр-ве имеется ортонормир. базис.
Док-во: Пусть g1, g2, …, gn - базис ЕП R. f1=g1, f2=g2+f1.
Выбираем
число
т.о., чтобы (f2,
f2)=0.
(g2+f1,
f1)=(g2,
f1)+(f1,
f1)=0
 .
.
Т.к. f10 (f1, f1)0. Т.к. g1 и g2 - Л.Н. f20.
Предположим (индукция), что теорема выполняется для f1, f2,…,fk-1,
т.е. предположим, что найдены векторы f1, f2,…,fk-1 попарно
ортогонал-е и 0.
fk=gk+1f1+…+k-1fk-1; 1, 2, k-1 выбираем т.о., чтобы (fk, fi)=0,
i=(1, k-1)
(gk+1f1+..+ifi+..+k-1fk-1,fi)=(gk,fi)+1(f1,fi)+..+i(fi,fi)+..+k-1(fk-1,i)=0
=0 =0
(gk,
fi)
+i(fi,
fi)=0
 ,
i=(1, k-1).
,
i=(1, k-1).
Т.к fi0 (fi, fi)0. Т.к. g1, g2,…, gk – Л.Н. fk0.
Процесс завершается, когда мы получим вектор fn=gn+1f1+…+n-1fn-1.
Т.о. f1, f2,…,fn- попарно ортогон. и 0 по лемме эти векторы Л.Н. обр-т ортогон. базис.
 e1,
e2,…, en – ортонорм. базис.
e1,
e2,…, en – ортонорм. базис.
Опр. Процесс, в результате которого из Л.Н. системы получается ортонормир. система, наз-ся процессом ортогонализации.
45. Понятие линейного оператора. Матрица линейного оператора в заданном базисе линейного пространства. Примеры. Преобразование матрицы линейного оператора при переходе к новому базису.
Оператором называется правило, по которому каждому элементу x некоторого непустого множества X ставится в соответствие единственный элемент y некоторого непустого множества Y. Говорят, что оператор действует из X в Y. Действие оператора обозначают y = A(x), y — образ x, x — прообраз y. Если каждый элемент y из Y имеет единственный прообраз x из X, y= A(x), оператор называют взаимно однозначным отображением X в Y или преобразованием X, X — область определения оператора. Пусть X и Y два линейные пространства. Оператор A, действующий из X в Y, называется линейным оператором, если для любых двух элементов u и v из X и любого числа α справедливо: A(u + v) = A(u ) + A(v) , A(α·u) = α· A(u).
Рассмотрим
линейный оператор ![]() ,
действующий в конечномерном линейном
пространстве
,
действующий в конечномерном линейном
пространстве ![]() ,
,![]() и
пусть
и
пусть ![]() базис
в
.
Обозначим через
базис
в
.
Обозначим через
![]() образы
базисных векторов
образы
базисных векторов
![]() .
Матрица
.
Матрица столбцами которой являются координаты
образов базисных векторов, называется матрицей
линейного оператора в заданном
базисе.
столбцами которой являются координаты
образов базисных векторов, называется матрицей
линейного оператора в заданном
базисе.