

§ 4. Электродинамика в четырехмерных обозначениях
В
гл. 18, § 6, мы уже сталкивались с оператором
Даламбера, хотя и не знали, что он так
называется. Мы нашли там дифференциальное
уравнение для потенциалов, которое в
новых обозначениях выглядит так:
(25.21)
С
правой стороны (25.21) стоят четыре величины
,
jx,
j , jz,
поделенные
на 0
— универсальную постоянную, одинаковую
во всех системах координат, если во всех
системах для измерения заряда
используется одна и та же единица. Таким
образом, четыре величины /jе0,
jх/0,
jy/0,
jz/0
тоже преобразуются как четырехвектор.
Их можно записать в виде jz/е0.
Оператор Даламбера не изменяется при
переходе к другим системам координат,
так что четыре величины ,
Ах,
Ау
и Az
тоже
должны преобразоваться как
четырехвектор, т. е. должны
быть компонентами
четырехвектора. Короче говоря, величина
есть четырехвектор. То, что мы называли скалярным и векторным потенциалами, оказывается только разными частями от одной и той же физической величины. Они неотделимы друг от друга. А если это так, то релятивистская инвариантность мира очевидна. Вектор А мы называем четырехмерным потенциалом (4-потенциалом).
В четырехмерных обозначениях (25.21) приобретает очень простой вид:
(25.22)
Физика этого уравнения та же, что и уравнений Максвелла. Но есть своя прелесть в том, что можно переписывать их в столь элегантной форме. Впрочем, эта красивая форма содержит и кое-что более значительное — из нее непосредственно видна инвариантность электродинамики относительно преобразований Лоренца.
Напомним, что уравнение (25.21) можно получить из уравнений Максвелла только тогда, когда наложено дополнительное условие градиентной инвариантности:
(25.23)
что означает просто A =0, т. е. условие градиентной инвариантности говорит, что дивергенция четырехмерного вектора А равна нулю. Это требование носит название условия Лоренца. Такая форма его записи очень удобна, ибо она инвариантна, а поэтому уравнения Максвелла во всех системах отсчета сохраняют вид (25.22).
§ 5. Четырехмерный потенциал движущегося заряда
Теперь
выпишем законы преобразования, выражающие
и А в движущейся системе через
и А в неподвижной, хотя неявно мы уже
говорили о них. Поскольку А
= (,
А) является четырехвектором, это уравнение
должно выглядеть подобно (25.1), за
исключением того, что t
нужно
заменить на ,
а x
— на А. Таким образом,
(25.24)
При этом предполагается, что штрихованная система координат движется по отношению к нештрихованной со скоростью v в направлении оси х.
Рассмотрим один пример плодотворности идеи 4-потенциала. Чему равны векторный и скалярный потенциалы заряда q, движущегося со скоростью v в направлении оси х! Задача очень упрощается в системе координат, движущейся вместе с зарядом, ибо в этой системе заряд покоится. Пусть заряд находится в начале координат системы S', как это показано на фиг. 25.2.
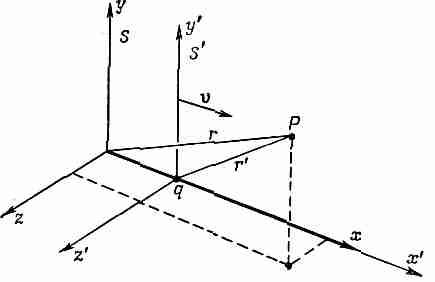
Фиг. 23.2. Система отсчета S' движется со скоростью v (в направлении оси х) по отношению к системе S.
Заряд, покоящийся в начале системы координат S', находится в системе S в точке x=vt. Потенциалы в точке Р могут быть найдены для любой системы отсчета.
Скалярный потенциал в движущейся системе задается выражением
(25.25)
причем r' — расстояние от заряда q до точки в движущейся системе, где производится измерение поля. Векторный же потенциал А', разумеется, равен нулю.
Теперь без особых хитростей можно найти потенциалы и А в неподвижной системе координат. Соотношениями, обратными к уравнениям (25.24), будут
(25.26)
Используя далее выражение для '[см. (25.25)] и равенство А'=0, получаем

Эта
формула дает нам скалярный потенциал
,
который мы увидели бы в системе S,
но он, к
сожалению, записан через координаты
штрихованной системы. Впрочем, это дело
легко поправимо; с помощью (25.1) можно
выразить t',
х', у',
z'
через
t,
x, у, z
и получить
(25.27)
Повторяя ту же процедуру для вектора А, вы можете показать,
что
А = v. (25.28)
Это те же самые формулы, которые мы вывели в гл. 21, но там они были получены другим методом.