

Гомология
Определение: Не тождественная коллинеация, для которой существует точечно неподвижная прямая называется гомологией.
По принципу двойственности у гомологии будет неподвижная точка.
Определение: Прямая называется осью гомологии. Точка называется центром гомологии.
Обозначение: Р – центр, р – ось.
Определение:
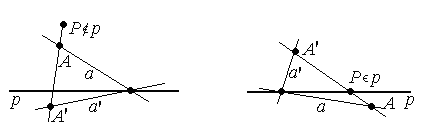
Если Р
![]() р - гомология
называется параболической,
если Р
р - гомология
называется параболической,
если Р
![]() р - гомология
называется гиперболической.
р - гомология
называется гиперболической.
Теорема. Любая прямая инцидентная центру гомологии является неподвижной.
Доказательство. (самостоятельно).
Свойства:
1. Точка и ее образ
лежат на одной прямой с центром ![]() А
А
![]() А′
А′![]() (АР).
(АР).
2. Прямая и ее образ
пересекаются на оси ![]() а
а
![]() а′ ∩ а = А0
а′ ∩ а = А0
![]() р.
р.
Теорема. Для любых точки Р, прямой р и пары точек А и А′, коллинеарных с точкой Р, существует единственная гомология с центром Р и осью р, переводящая А в А′.
(Сформулируйте теорему двойственную этой.)
Доказательство.
1 случай: Р
![]() р.
р.
Пусть
р ∩(АА′)=Х
, возьмем ещё две точки U
≠ V
![]() р .
р .
Р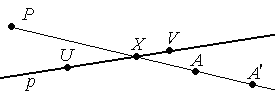 ассмотрим
две четвёрки точек: А,
Р, U, V и А',
Р, U, V – в
каждой четвёрке точек
никакие три
не лежат на одной прямой. Тогда можно
рассмотреть коллинеацию
ассмотрим
две четвёрки точек: А,
Р, U, V и А',
Р, U, V – в
каждой четвёрке точек
никакие три
не лежат на одной прямой. Тогда можно
рассмотреть коллинеацию
φ: U→U, V→V, Р→Р, А→А′.
Так как U, V – неподвижные точки, тогда неподвижна вся прямая - р, а значит это гомология.
2 случай: Р
![]() р
(самостоятельно). □
р
(самостоятельно). □
Вывод: Гомологию можно задать: осью, центром и парой точек, коллинеарных с центром. Гомологию можно задать: осью центром и парой прямых.
Построение образов и прообразов точек при гомологии.
-
Дано: Р
 р , А
, А′
, Р
– коллинеарны.
р , А
, А′
, Р
– коллинеарны.
Простроить образ и прообразы произвольных точек.
а) М![]() р → точки
прямой р
инвариантны.
р → точки
прямой р
инвариантны.
б) В,
С′
![]() (АА′): (АВ)∩р=В0
, (РВ)∩(В0А′)=В′
- образ.
(АА′): (АВ)∩р=В0
, (РВ)∩(В0А′)=В′
- образ.
(А′С′)∩р=С0 , (РС′)∩(С0А)=С - прообраз.
в) К![]() (АА′) → для
таких точек вместо точек А и А′
можно использовать В
, В′
или С
, С′
(АА′) → для
таких точек вместо точек А и А′
можно использовать В
, В′
или С
, С′
(см (б)).
г) D∞ → построение аналогично (б).

-
Дано: Р
 р , А
, А′
, Р
– коллинеарны.
р , А
, А′
, Р
– коллинеарны.
Простроить образ и прообразы произвольных точек.
а) М![]() р → точки
прямой р
инвариантны.
р → точки
прямой р
инвариантны.
б) В,
С′
![]() (АА′): → (АВ)∩р=В0
, (РВ)∩(В0А′)=В′
- образ.
(АА′): → (АВ)∩р=В0
, (РВ)∩(В0А′)=В′
- образ.
→ (А′С′)∩р=С0 , (РС′)∩(С0А)=С - прообраз.
в) К![]() (АА′) → для
таких точек вместо точек А и А′
можно использовать В
, В′
или С
, С′ (см
(б)).
(АА′) → для
таких точек вместо точек А и А′
можно использовать В
, В′
или С
, С′ (см
(б)).
г) D∞ → построение аналогично (б).
Замечание: Построения для параболической гомологии аналогичны построениям для гиперболической гомологии.

Рассмотрим гиперболическую гомологию, пусть Х= (АВ)∩(А′В′).

При центральном проектировании прямой (АА′) на прямую (ВВ′) с центром Х точки В, В′, В0 являются центральными проекциями точек А, А′, А0 . Точка Р при этом проектировании является неподвижной (почему?). Тогда по свойствам сложного отношения (РА0 , АА′)=(РВ0 ,ВВ′), значит это сложное отношение - величина постоянная.
Обозначим её h =(РА0 , АА′) - она называется константой гомологии.
Теорема.
Для любой прямой р,
точки Р
![]() р, и любого
действительного числа h,
отличного
от 0 и 1. Существует гиперболическая
гомология с центром Р,
осью р
и константой h.
р, и любого
действительного числа h,
отличного
от 0 и 1. Существует гиперболическая
гомология с центром Р,
осью р
и константой h.
Доказательство.
Дано Р
![]() р, h
, берем
р, h
, берем
![]() А.
А0=
р∩(АР)
- точка единственна. Тогда точка
А′ находится
из условия h
=(РА0
, АА′)
- по свойствам сложного отношения такая
точка единственна, причем А′
А.
А0=
р∩(АР)
- точка единственна. Тогда точка
А′ находится
из условия h
=(РА0
, АА′)
- по свойствам сложного отношения такая
точка единственна, причем А′
![]() (РА).
По предыдущей теореме существует
гомология с осью р,
центром Р и
А → А′.
□
(РА).
По предыдущей теореме существует
гомология с осью р,
центром Р и
А → А′.
□
Определение: Гомология называется инволюционной, если она совпадает со своим обратным отображением.
Теорема. Параболическая гомология не может быть инволюционной.
Доказательство.
От противного.
Пусть Р
![]() р .
р .
Т ак
как преобразование - инволюция, то
существуют точки А↔А′
и В↔В′.
Тогда прямые (АВ)↔(А′В′)
- переходят друг в друга,
ак
как преобразование - инволюция, то
существуют точки А↔А′
и В↔В′.
Тогда прямые (АВ)↔(А′В′)
- переходят друг в друга,
![]() Q=(АВ)∩(А′В′)
Q=(АВ)∩(А′В′)![]() р.
Прямые (А′В)↔(АВ′)
– тоже переходят друг в друга,
р.
Прямые (А′В)↔(АВ′)
– тоже переходят друг в друга,
![]() R=(А′В)∩(АВ′)
R=(А′В)∩(АВ′)![]() р.
р.
Но АВА′В′ - четырёхвершинник и ΔРQR – диагональный трёхвершинник, а значит эти точки не могут лежать на одной прямой (оси - р). (противоречие). □
Теорема. Для того чтобы гиперболическая гомология была инволюционной, необходимо и достаточно, чтобы константа h =-1.
Доказательство.
Пусть
Р
![]() р , М
→ М′
, (ММ′)∩р=М0
.
р , М
→ М′
, (ММ′)∩р=М0
.
Необходимость h = -1.
Пусть М′→М′′, тогда (РМ0 ,ММ′)= - 1 =(РМ0 ,М′М) - по свойству сложного отношения,
но (РМ0
, М′М)=(
РМ0
, М′′М′)
- по свойству проективного преобразования
![]() М=М′′
М=М′′
![]() М
↔ М′.
М
↔ М′.
Достаточность М ↔ М′.
(РМ0
, ММ′)=![]()
![]() (РМ0
,М′М)2
= 1
(РМ0
,М′М)2
= 1
![]() (РМ0
,М′М)=±
1.
(РМ0
,М′М)=±
1.
Но (РМ0
,М′М)=1
- не может быть (почему?), ![]() (РМ0
,М′М)
= - 1. □
(РМ0
,М′М)
= - 1. □
Вывод: Инволюционная гомология определяется центром и осью.