Координаты точки на прямой (плоскости)
Рассмотрим P1 и R(Е1 , Е2 , Е) - проективный репер на прямой
Пусть ē1
, ē2
, ē
- согласованная система векторов и пусть
точка М![]() P1
порождается вектором
P1
порождается вектором
![]() .
.
Векторы ē1
, ē2
– базисные,
тогда
![]() =х1∙ē1+х2∙ē2.
=х1∙ē1+х2∙ē2.
Определение: Набор чисел ( х1 , х2 ) называется координатами точки в данном репере.
Вектор
![]() =
λ∙
=
λ∙![]() =λ∙х1∙ē1+λ∙х2∙ē2
- определяет ту же точку М.
=λ∙х1∙ē1+λ∙х2∙ē2
- определяет ту же точку М.
Тогда, точка М определяется набором или (х1 , х2) или (λ∙х1 , λ∙х2).
Вывод: Координаты точки определены с точностью до постоянного множителя (до пропорциональности).
Обозначение:
М
( х1
:
х2 )
или
![]() .
.
На проективной плоскости координаты определяются аналогично:
Обозначение:
М (
х1
:
х2
:
х3
) или
![]() .
.
Замечание: Числа х1 и х2 (для плоскости - х1 , х2 , х3 ) одновременно не обращаются в ноль(Почему?).
Координаты точек репера на прямой будут:
вершины - Е1![]() ,
Е2
,
Е2![]() , единичная
точка - Е
, единичная
точка - Е![]() ,
,
на плоскости - Е1( 1 : 0 : 0 ), Е2( 0 : 1 : 0 ), Е3( 0 : 0 : 1 ), Е( 1 : 1 : 1 ) (Обоснуйте).
Построение точек по координатам на прямой
Рассмотрим построение точек по координатам на примере.
Задача. Дана модель «пучок прямых» и R(Е1 , Е2 , Е).
Построить точки
А![]() , В
, В![]() , С
, С![]() , К
, К
![]() , М
, М![]() .
.
Решение. С учетом пропорциональности координат точек будут:
А![]() , В
, В![]() , С
, С![]() =Е1
, К
=Е1
, К
![]() =Е,
М
=Е,
М![]() .
.
Началом системы координат будем считать точку S – центр пучка.
На прямых (SЕ), (SЕ1), (SЕ2) выберем векторы ē , ē1 , ē2 так, чтобы ē = ē1+ ē2.
В базисе ē1
, ē2
построим векторы ā
=( 1 ; 4 ),
![]() =(
-2 ; 15 ),
=(
-2 ; 15 ),
![]() =(
1 ; - 1 ).
=(
1 ; - 1 ).
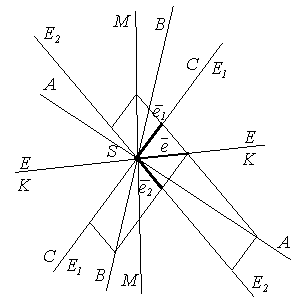
Прямые пучка
содержащие векторы ā
,
![]() ,
,
![]() - будут проективными точками.
- будут проективными точками.
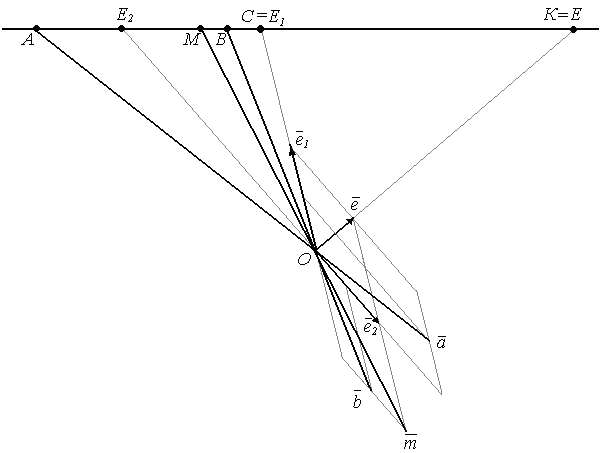
Задача. Дана расширенная евклидова прямая и R(Е1 , Е2 , Е).
Построить точки
А![]() , В
, В![]() , С
, С![]() , К
, К
![]() , М
, М![]() .
.
Решение. С учетом пропорциональности координат точек будут:
А![]() ,
В
,
В![]() ,
С
,
С![]() =Е1
, К
=Е1
, К
![]() =Е
, М
=Е
, М![]() .
.
Возьмем произвольную точку О не лежащую на прямой, проведем прямые (ОЕ), (ОЕ1), (ОЕ2).
На этих прямых выберем векторы ē , ē1 , ē2 так, чтобы ē=ē1+ē2.
В базисе ē1 , ē2 построим векторы
ā
=( 0,5 ; 2 ),
![]() =(
-1 ; 0,5 ),
=(
-1 ; 0,5 ),
![]() =(
-1 ; 1 ).
=(
-1 ; 1 ).
Принадлежность трёх точек одной прямой
Пусть А![]() ,
В
,
В![]() ,
С
,
С![]() - различные точки на P2,
тогда векторы, порождающие эти точки:
- различные точки на P2,
тогда векторы, порождающие эти точки:
ā
=( а1
: а2
: а3),
![]() = (
b1
: b2
: b3
),
= (
b1
: b2
: b3
),
![]() =
( с1
: с2
: с3
).
=
( с1
: с2
: с3
).
Точки могут лежать на одной прямой или не лежать на одной прямой.
1. А,
В, С
![]() P1,
тогда ā,
P1,
тогда ā,
![]() ,
,
![]()
![]() L2
L2
![]() ā,
ā,
![]() ,
,
![]() - линейно-зависимы
- линейно-зависимы
![]()
![]() такие, что
такие, что
![]() = α∙ā
+ β∙
= α∙ā
+ β∙![]()
![]()
![]() =α∙
=α∙![]() +β∙
+β∙![]() , или rg
, или rg =
2, или
=
2, или
 =
0.
=
0.
Определение: Точки лежащие на одной прямой называются коллинеарными.
2. Пусть А,
В
![]() P1
и С
P1
и С
![]() P1
, тогда
векторы ā,
P1
, тогда
векторы ā,
![]() ,
,
![]()
![]() L2
L2
![]()
ā,
![]() ,
,
![]() - линейно-независимы
- линейно-независимы
![]()
![]() ≠
α∙ā
+ β∙
≠
α∙ā
+ β∙![]()
![]()
![]() ≠
α∙
≠
α∙![]() +
β∙
+
β∙![]() , или rg
, или rg ≠
2, или
≠
2, или
 ≠
0.
≠
0.
Вывод: Для того, чтобы точки А, В, С были коллинеарными необходимо и достаточно выполнение одного из условий:
![]() α,
β
такие, что
α,
β
такие, что
![]() =α∙
=α∙![]() +
β∙
+
β∙![]() или С=
α∙А+
β∙В;
или С=
α∙А+
β∙В;
rg =
2 или
=
2 или  =
0.
=
0.
Замечание: Для проверки коллинеарности большего количества точек удобнее проверять условие rg М = 2, где М – матрица, составленная из координат точек. (Обоснуйте!).
Рассмотрим условие принадлежности какой-либо точки одной из координатных прямых: (Е1Е2), (Е1Е3), (Е2Е3).
Пусть М
![]()
![]() (Е1Е2), тогда
(Е1Е2), тогда
 =0
=0
![]() х3
= 0.
х3
= 0.
Аналогично: М
![]()
![]() (Е1Е3), тогда х2
= 0; М
(Е1Е3), тогда х2
= 0; М
![]()
![]() (Е2Е3), тогда х1
= 0.
(Е2Е3), тогда х1
= 0.
Вывод: Если одна из координат точки равна 0, тогда точка принадлежит одной из координатных прямых.
Могут ли три координаты точки равняться 0? А две?
Пусть точка Х отлична от вершин репера.
Определение: Проекцией точки Х из Е3 на (Е1Е2) называется точка Х3 такая, что Х3= (ХЕ3)∩(Е1Е2).
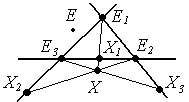
Аналогично определяются проекции из Е2 и Е1:
Х1= (ХЕ1)∩(Е2Е3),
Х2=(ХЕ2)∩(Е1Е3).
Тогда Х= (Х1Е1) ∩ (Х1Е2) ∩ (Х3Е3).
Пусть Е10 , Е20 , Е30. - проекции точки Е на координатные прямые,
тогда на каждой прямой возникает свой репер:
на (Е1Е2) - R(Е1 , Е2 , Е30),
на (Е1Е3) - R(Е1 , Е3 , Е20),
на (Е2Е3) - R(Е2 , Е3 , Е10).
Теорема о
проекциях.
Пусть R(Е1
, Е2
, Е3
, Е)
- репер на проективной плоскости, точка
Х
![]() отлична от точек репера, точки Х1
, Х2
, Х3
– проекции точки Х
на соответствующие координатные прямые.
Тогда
отлична от точек репера, точки Х1
, Х2
, Х3
– проекции точки Х
на соответствующие координатные прямые.
Тогда
точка Х1 в R(Е2 , Е3 , Е10) будет иметь координаты ( х2 : х3),
точка Х2 в R(Е1 , Е3 , Е20) будет иметь координаты - ( х1 : х3),
точка Х3 в R(Е1 , Е2 , Е30) будет иметь координаты - ( х1 : х2).
Доказательство. Докажем для одной проекции точки, для остальных доказательство по аналогии.
Пусть Х1
![]() ,
т.к. Х1
,
т.к. Х1![]() (Е2Е3),
тогда у1=
0
(Е2Е3),
тогда у1=
0
![]() Х1
Х1
![]() .
.
Точки
Х, Х1 ,
Е1
- принадлежат
одной прямой
![]()
 =0
=0
![]() х2∙у3
– х3∙у2=0
х2∙у3
– х3∙у2=0
![]()
![]()
![]() у2=
λ ∙х2
,
у3
= λ ∙х3
у2=
λ ∙х2
,
у3
= λ ∙х3
![]()
Х1
 или Х1
или Х1
![]() ,
аналогично: Х2
,
аналогично: Х2
![]() и Х3
и Х3
![]() .
.
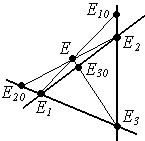
Тогда проекции точки Е на координатные прямые будут иметь координаты:
Е10
![]() , Е20
, Е20
![]() , Е30
, Е30
![]() т.к. Е
т.к. Е
![]() .
.
Рассмотрим: Е10
![]() ,
Е2
,
Е2![]() ,
Е3
,
Е3![]() и Х1
и Х1![]() -
они все лежат на прямой (Е1Е2).
-
они все лежат на прямой (Е1Е2).
Рассмотрим векторы, порождающие эти точки в базисе ē1 , ē2 , ē3 :
ē10 = 0 ∙ ē1 + 1 ∙ ē2 + 1 ∙ē3 , → ē10 = 1 ∙ ē2 + 1 ∙ē3 ,
ē2 = 0 ∙ ē1 + 1 ∙ ē2 + 0 ∙ē3 , → ē2 = 1 ∙ ē2 + 0 ∙ē3 ,
ē3 = 0 ∙ ē1 + 0 ∙ ē2 + 1 ∙ē3 , → ē3 = 0 ∙ ē2 + 1 ∙ē3 ,
![]() = 0
∙ ē1
+ х2
∙
ē2 +
х3
∙ē3
, →
= 0
∙ ē1
+ х2
∙
ē2 +
х3
∙ē3
, → ![]() = х2
∙
ē2 +
х3
∙ē3
.
= х2
∙
ē2 +
х3
∙ē3
.
Но векторы ē2 , ē3 линейно-независимы, система ē2, ē3 , ē10 - согласована (ē2+ ē3=ē10), а значит точки Е2 , Е3 , Е10 образуют репер R(Е2 , Е3 , Е10 ) и точка Х1 в нем имеет координаты ( х2 : х3). □
Замечание: Это теорема позволяет легко строить точки на проективной плоскости по их проекциям, т.к. Х= (Х1Е1)∩(Х1Е2)∩(Х3Е3).
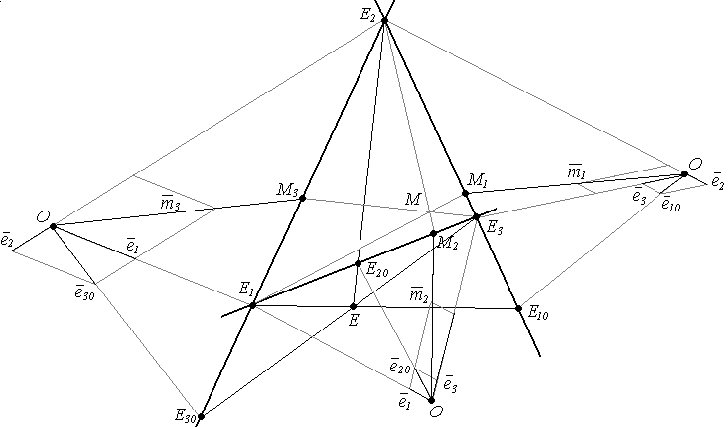
Построение точек по координатам на плоскости
Рассмотрим построение точек по координатам на примере.
Задача.
На расширенной евклидовой плоскости
построить точку М
![]() .
.
Решение. Пусть М1 , М2 , М3 - проекции точки М на соответствующие координатные прямые.
Тогда проекция точки М - точка М1 в R(Е2 , Е3 , Е10) будет иметь координаты (-2 : 4 ) или ( -1 : 2 ),
точка М2 в R(Е1 , Е3 , Е20) будет иметь координаты (1 : 4),
точка М3 в R(Е1 , Е2 , Е30) будет иметь координаты ( 1 : -2 ).
При построении проекций будем пользоваться построением точек на проективной прямой.
Восстановим базисы на каждой координатной прямой.
Например, на прямой (Е1Е2) - R(Е1 , Е2 , Е30).
Берем произвольную точку О, на прямой на (ОЕ30), выбираем произвольный вектор ē30 – раскладываем его по векторам ē1 и ∙ē2 , которые лежат на прямых (ОЕ1) и (ОЕ2).
В этом базисе
построим вектор ![]() =
- ē2
- 2∙ē3,.
=
- ē2
- 2∙ē3,.
Точка М1
лежит на прямой (Е1Е2)
– продляем прямую, содержащую вектор
![]() до пересечения с прямой (Е1Е2).
до пересечения с прямой (Е1Е2).
Аналогично на
прямой (Е1Е3)
в репере R(Е1
, Е3
, Е20),
строим вектор
![]() =
ē1
+ 4∙ē3
и точку
М2
.
=
ē1
+ 4∙ē3
и точку
М2
.
На прямой (Е2Е3)
в репере R(Е1
, Е2
, Е30)
-
![]() =
ē1
- 2∙ē2
и точку М3
.
=
ē1
- 2∙ē2
и точку М3
.
Точка М = (Е1М1) ∩ (Е2М2) ∩ (Е3М3).