

Изоморфизм моделей
Определение: Две модели называются изоморфными, если существует взаимно-однозначное соответствие между ними, сохраняющее основные отношения между элементами моделей.
Замечание: Основными отношениями между элементами (точками) моделей является отношение «принадлежности».
Для изоморфных моделей в силу взаимной однозначности справедливы сходные утверждения. Это позволяет доказывать утверждения для одной модели и переносить его на другую модель.
Изоморфизм моделей проективной прямой или проективной плоскости доказать самостоятельно (установить биекцию между моделями).
Проективная система координат
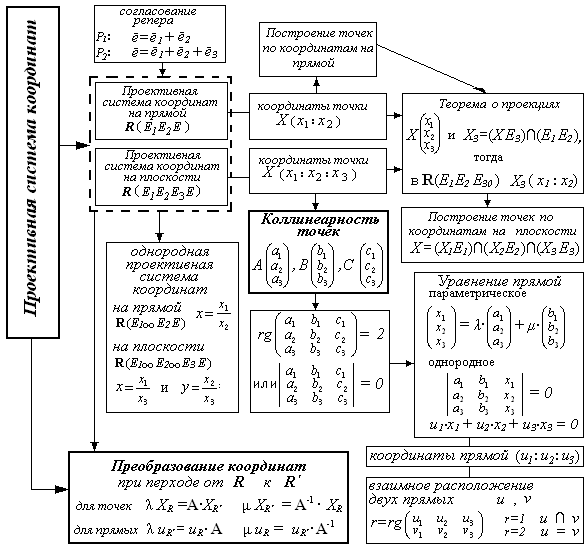
Проективный репер
Рассмотрим проективные прямую P1. и плоскость P2.
Определение: Упорядоченная система из трех различных точек Е1 , Е2 , Е - называется проективным репером на прямой P1.
Обозначение: R(Е1 , Е2 , Е) - проективный репер на прямой.
Определение: Упорядоченная система точек
Е1 , Е2 , Е3 , Е , среди которых никакие три не лежат на одной прямой, называется проективным репером на плоскости.
Обозначение: R(Е1 , Е2 , Е3 , Е) - проективный репер на плоскости.
Названия: Е1 , Е2 , Е3 - вершины репера или базисные точки,
Е - единичная точка,
(Е1Е2), (Е1Е3), (Е2Е3) - координатные прямые.
Пусть R(Е1 , Е2 , Е) - проективный репер на прямой (на P2 все определяется аналогично). P1 порождается V2.
Пусть Е1,
Е2
, Е порождаются
векторами - ē1
, ē2
, ē
![]() V2.
V2.
Замечание:
Так как Е1
≠Е2
![]() ē1
, ē2
– не коллинеарны, а значит они могут
образовывать базис в V2.
В дальнейшем будем считать ē1
, ē2
– базисом V2.
Аналогично для Р2
- векторы
ē1
, ē2
, ē3
– линейно
независимы (почему?), а значит могут быть
базисом в V3.
ē1
, ē2
– не коллинеарны, а значит они могут
образовывать базис в V2.
В дальнейшем будем считать ē1
, ē2
– базисом V2.
Аналогично для Р2
- векторы
ē1
, ē2
, ē3
– линейно
независимы (почему?), а значит могут быть
базисом в V3.
Определение: Система векторов ē1 , ē2 , ē - называется согласованной, если ē1+ē2=ē (для Р2 - ē= ē1+ ē2+ē3).
Теорема. Всегда существует система векторов согласованная с данным репером.
Доказательство. Докажем для проективной прямой, для проективной плоскости доказывается по аналогии.
Точки Е1
, Е2
, Е
порождаются векторами ē1
, ē2
, ē
![]() V2
V2
![]() они линейно зависимы
они линейно зависимы
![]()
![]() такие, что α∙ē1
+ β∙ē2
= ē. Но
ē'1=α∙ē1
- порождает
точку Е1,
а ē'2
=β∙ē2
- точку Е2
(аксиома 2). Тогда система ē'1,
ē'2,
ē – будет
согласованной с данным репером.
□
такие, что α∙ē1
+ β∙ē2
= ē. Но
ē'1=α∙ē1
- порождает
точку Е1,
а ē'2
=β∙ē2
- точку Е2
(аксиома 2). Тогда система ē'1,
ē'2,
ē – будет
согласованной с данным репером.
□
Замечание: Систем векторов согласованных с данным репером много.
Теорема.
Пусть R(Е1
, Е2
, Е)
репер на прямой, а ē1
, ē2
, ē
и ā1
, ā2
, ā
- две системы векторов, согласованные
с данным репером, тогда
![]() λ ≠ 0 , причем ā1=
λ∙ē1
, ā2=
λ∙ē2
, ā=
λ∙ē.
λ ≠ 0 , причем ā1=
λ∙ē1
, ā2=
λ∙ē2
, ā=
λ∙ē.
Доказательство.
Так как вектора ē1
, ē2
, ē
и ā1
, ā2
, ā
порождают одинаковые точки
![]() по аксиоме 2 они коллинеарны, т.е.ā1=λ1∙ē1
, ā2=λ2∙ē2
, ā=λ∙ē,
но системы
согласованны
по аксиоме 2 они коллинеарны, т.е.ā1=λ1∙ē1
, ā2=λ2∙ē2
, ā=λ∙ē,
но системы
согласованны
![]() ē1+
ē2=
ē и ā1+
ā2=ā
ē1+
ē2=
ē и ā1+
ā2=ā
![]() λ1∙ē1+λ2∙ē2=λ∙ē
λ1∙ē1+λ2∙ē2=λ∙ē
![]() λ1∙ē1+λ2∙ē2=λ∙ē
| : λ≠0
λ1∙ē1+λ2∙ē2=λ∙ē
| : λ≠0
![]() ē=
ē=
![]() ∙ē1+
∙ē1+![]() ∙ē2=ē1+ē2
∙ē2=ē1+ē2
![]()
![]() =1 и
=1 и ![]() =1
=1
![]() λ1=λ2=λ
λ1=λ2=λ ![]() ā1=λ∙ē1
, ā2=λ∙ē2
, ā=λ∙ē.
ā1=λ∙ē1
, ā2=λ∙ē2
, ā=λ∙ē.
Для проективной плоскости Р2 рассмотреть самостоятельно (по аналогии). □
Определение: Базисы ē1 , ē2 , ē3 и ā1 , ā2 , ā3, такие, что ēi=λ āi называются гомотетичными.