

Отображение пучка в пучок
Рассмотрим отображение двойственное перспективе прямой на прямую:

Определение: Перспективой пучка в пучок с осью s называется отображение φ : П(L1) → П(L2), при котором каждой прямой а1 пучка П(L1) ставится в соответствие прямая а2 пучка П(L2) такая что прямые а1 и а2 пересекаются в точке инцидентной оси s.
В силу принципа двойственности будут выполняться все свойства перспективы прямой на прямую (сформулировать самостоятельно).
Замечание: Перспектива пучка в пучок тоже является проективным преобразованием.
Теорема.
Пусть даны два пучка П(L1)
и П(L2).
В каждом пучке отмечены три различные
прямые а1
, b1
,с1![]() П(L1)
и а2
, b2
, с2
П(L1)
и а2
, b2
, с2![]() П(L2).
тогда существует единственное проективное
отображение f
: П(L1)
→ П(L2),
при котором прямые а1
, b1
,с1
переходят в прямые а2
, b2
, с2.
П(L2).
тогда существует единственное проективное
отображение f
: П(L1)
→ П(L2),
при котором прямые а1
, b1
,с1
переходят в прямые а2
, b2
, с2.
Доказательство. Самостоятельно.
Построение перспективы пучка в пучок.
1 случай: П(L1) ≠ П(L2).
1. А = а1 ∩ а2 , через точку А проводим две прямые - s1 и s2
2. s1∩b1 =В1 и s1∩с1 =С1 .
3. s2∩b2 =В2 и s2∩с2 =С2 .
4. S =(В1В2)∩(С1С2).
5. Рассмотрим отображения φ1 : П(L1) → П(S) - перспектива с осью s1 и φ2 : П(S) → П(L2) - перспектива с осью s2 , тогда искомое проективное преобразование φ = φ2 ◦ φ1 . так как φ1 и φ2 - проективные преобразования, то φ - тоже проективное преобразование.
6. N1 =п1∩s1 , N2 =( N1S)∩s2 ,
7. (N2L2) - образ прямой п1 .

2 случай: П(L1) = П(L2) рассмотреть самостоятельно.
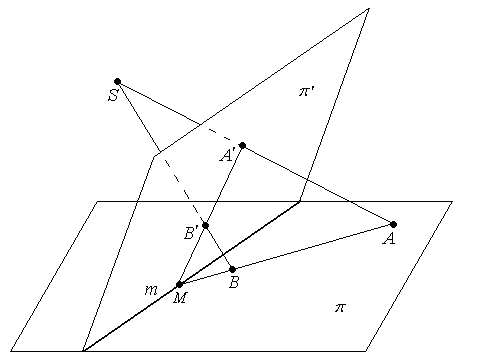
Определение: Центральной проекцией плоскости π на плоскость π' из точки S называется отображение при котором каждой точке А плоскости π ставится в соответствие точка А' плоскости π' такая что А'= π ' ∩ (SА).
Свойства:
Выполняются свойства 1 - 2 перспективы прямой на прямую.
3. При перспективе плоскости на плоскость прямая пересечения плоскостей переходит сама в себя.

Определение: Перспективой пучка в пучок в пространстве Р3 с плоскостью перспективы π называется отображение φ : П(L1) → П(L2), при котором каждой прямой а1 пучка П(L1) ставится в соответствие прямая а2 пучка П(L2) такая что прямые а1 и а2 пересекаются в точке инцидентной плоскости перспективы π.
Инволюция
Определение: Нетождественное проективное преобразование, совпадающее со своим обратным называется инволюцией φ = φ -1.
Рассмотрим φ ◦ φ -1.
С одной стороны
φ◦φ -1=
е,
с другой φ◦φ
-1 =
φ◦φ
= φ2,
![]() φ2
= е.
φ2
= е.
φ3=φ◦φ2 = φ◦е = φ , φ4 =φ◦φ3 = φ◦φ = φ2 = е и т.д.
Замечание: В дальнейшем будем рассматривать инволюцию прямой.
Теорема. Для того чтобы преобразование прямой на себя было инволюцией необходимо и достаточно, чтобы на этой прямой существовала пара точек переходящих друг в друга: А ↔ А′.
Доказательство.
Необходимость: Дано φ=φ-1 и А→φ(А)=А′. Доказать, что А′→ φ(А′)=А.
φ(А′) = φ(φ(А)) = φ◦φ (А) = е(А) = А .
Достаточность: Дано φ(А) = А′ и φ(А′) = А. Доказать , что φ = φ -1,
т.е.
![]() Х
если φ (Х)=
Х′
, то φ(Х′)=
Х
.
Х
если φ (Х)=
Х′
, то φ(Х′)=
Х
.
От противного. Пусть φ (Х)= Х′ , то φ(Х′)= Х ″ ≠ Х.
Так как это проективное преобразование, то сохраняется сложное отношение четырех точек (АА′,ХХ ′ )= (φ(А)φ(А′),φ(Х)φ(Х ′ ))= (А′А,Х ′ Х ′′ ) = (АА′,Х ′′ Х ′ ), то в силу свойств и единственности сложного отношения получим, что Х = Х ′′. □
Отображение прямой на себя будет задаваться невырожденной матрицей второго порядка.
Пусть М![]() ,
если φ=φ-1
, тогда М=М-1
,
если φ=φ-1
, тогда М=М-1
![]() М2=λ∙Е.
М2=λ∙Е.
![]() =
=![]()
![]()
![]()
![]()
![]()
возможны два решения:
М=![]() или М=
или М=![]() =
а∙Е,
а это не удовлетворяет определению
инволюции.
=
а∙Е,
а это не удовлетворяет определению
инволюции.
Итак, матрица
инволюции прямой М=![]() Δ
М= -(а2
+ bс)
≠ 0 (почему?)
Δ
М= -(а2
+ bс)
≠ 0 (почему?)
Теорема. Пусть на проективной прямой даны пары точек А, А′ и В, В′, причем хотя бы в одной паре точки различны, тогда существует единственная инволюция переставляющая эти точки.
Т.е. А ↔ А′ и В ↔ В′ .
Доказательство. Пусть А ≠ А′ .
Рассмотрим проективное преобразование φ: А → А′ , А′ → А, В → В′ ,
по теореме о задании проективного преобразования прямой - это преобразование единственное, а в силу предыдущей теоремы это инволюция (А↔А′). □
Вывод: В инволюции всегда есть пара точек А ↔ А′.
Рассмотрим инволюцию
и пару А ↔
А′. Если
взять эти точки в качестве базисных
точек репера, т.е. А
![]() и А′
и А′![]() ,
тогда λ1
А′ =
,
тогда λ1
А′ =
![]() ∙А=
∙А=![]() ∙
∙![]() =
=![]() =
=![]()
![]() а =
0, с = λ1
≠ 0.
а =
0, с = λ1
≠ 0.
λ2
А=
![]() ∙А′=
∙А′=![]() ∙
∙![]() =
=![]() =
=![]()
![]() b = λ2
≠ 0, а
= 0.
b = λ2
≠ 0, а
= 0.
![]() М=
М=![]() ,
т.е. формулы проективного преобразования
,
т.е. формулы проективного преобразования
 .
.
Определение: Точка называется инвариантной точкой проективного преобразования, если при отображении она переходит сама в себя → λ∙Х=М∙Х.
Нахождение инвариантных точек сводится к нахождению собственных векторов и собственных значений матрицы.
det | М – λ ∙Е | = 0 – характеристическое уравнение.
![]() =
0
=
0
![]() λ 2
– а 2
– bс = 0
λ 2
– а 2
– bс = 0
![]() λ2=а2+
bс= -ΔМ.
λ2=а2+
bс= -ΔМ.
1 случай: ΔМ
< 0 - существует
два решения
λ1 , 2 =
![]()
![]() существуют две неподвижные точки.
существуют две неподвижные точки.
2 случай: ΔМ > 0 - нет решения – нет неподвижных точек.
3 случай: ΔМ = 0 - не может быть (почему?).
Определение: Если существует две инвариантные точки, то инволюция называется гиперболической. Если не существует инвариантных точек, то инволюция называется - эллиптической.
Инвариантные точки:
При λ1
=
![]() ,
,  ∙
∙![]() =
=![]()
![]()

![]()
![]()
![]() Х1
=
Х1
=
![]() .
.
При λ
2 =
-![]() ,
,  ∙
∙![]() =
=![]()
![]()

![]()
![]()
![]() Х2
=
Х2
=
![]() .
.
Вывод: Инволюция может иметь или две неподвижные точки, или ни одной.
Свойства:
1. Для гиперболической инволюции любые две пары соответствующих точек не разделяют друг друга.
2. Для эллиптической инволюции любые две пары соответствующих точек разделяют друг друга.
Доказательство. Пусть в инволюции А ↔ А′ и В ↔ В′ .
Возьмем А
и
А′ за
базисные точки репера
![]() М=
М=![]() .
.
Пусть В![]() ,
причем b1
≠ 0 и b2
≠ 0
(почему?),
,
причем b1
≠ 0 и b2
≠ 0
(почему?),
тогда λ∙В′=![]() ∙
∙![]() =
=
![]()
(АА′,ВВ′)= .
.
Таким образом:
Для гиперболической
инволюции - det М
= - b∙с
< 0, ![]()
(АА′,ВВ′) > 0, т.е. пары не разделяют друг друга.
Для эллиптической
инволюции - det М=
- b∙с
> 0, ![]()
(АА′,ВВ′) < 0, т.е. пары разделяют друг друга. □
3. Для эллиптической инволюции и любой пары соответствующих точек найдется единственная пара делящая первую гармонически.
Доказательство. Пусть А ↔ А′ . Доказать, что существует пара точек В↔В' такая, что (АА',ВВ')= -1.
Возьмем А и А′ за базисные точки репера.
Тогда М
=![]() .
.
Пусть В![]() ,
причем х1
≠ 0 и
х2
≠ 0, тогда В′=
,
причем х1
≠ 0 и
х2
≠ 0, тогда В′= .
.
(АА′,ВВ′)= =
-1
=
-1 ![]()
![]() (почему
радикал существует?).
(почему
радикал существует?).
![]() существует
пара точек с координатами
существует
пара точек с координатами
![]() и
и
![]() .
.
Самостоятельно убедитесь, что В ↔ В′. □
4. Неподвижные точки гиперболической инволюции гармонически делят любую пару соответствующих точек А ↔ А′ .
Доказательство. Пусть А↔А′ , М1 и М2 - неподвижные точки.
(АА′,
М1М2)=(А′А,
М1М2)=![]()
![]() (АА′,М1М2)2
= 1
(АА′,М1М2)2
= 1
![]() (АА′,М1М2)
= ± 1. Если (АА′,М1М2)=
1
(АА′,М1М2)
= ± 1. Если (АА′,М1М2)=
1 ![]() М1
= М2
, но неподвижные
точки
гиперболической инволюции различны, а
значит (АА′,М1М2)=
- 1. □
М1
= М2
, но неподвижные
точки
гиперболической инволюции различны, а
значит (АА′,М1М2)=
- 1. □
Построение образов и прообразов точек при инволюции прямой.
Задача. Инволюция задана точками А ↔ А′ и В ↔ В′. Построить образ и прообраз произвольных точек.
Решение. Решение соответствует второму случаю (ℓ1 = ℓ2) отображения φ: А → А′,В → В′, А′ → А.
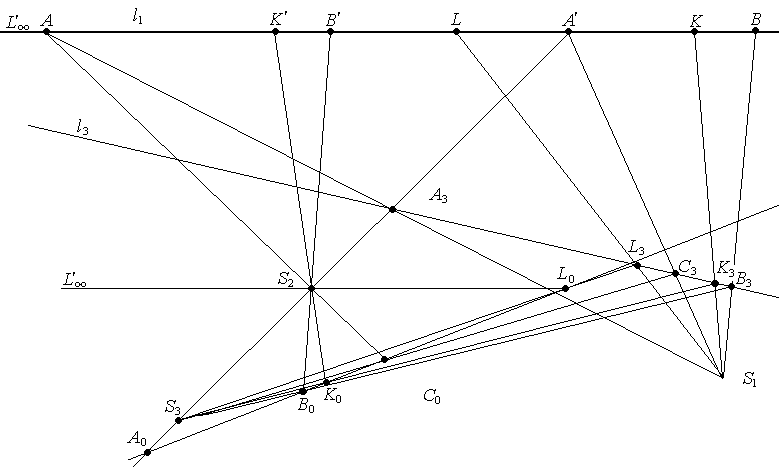
Построение:
1. ![]() S1
S1![]() ℓ1
,
ℓ1
,
2. ![]() ℓ3
, такую, что
S1
ℓ3
, такую, что
S1
![]() ℓ3
и ℓ1
≠ ℓ3
,
ℓ3
и ℓ1
≠ ℓ3
,
3. А3 = ℓ3 ∩ (S1 А), В3 = ℓ3 ∩ (S1В), С3 = ℓ3 ∩ (S1 А′),
4. ![]() S2 ≠
S3
S2 ≠
S3
![]() (А′А3),
(А′А3),
5. С0 =(S3С3)∩(S2А), В0 =(S3В3)∩(S2В′), А0 =(В0С0)∩(А′А3).
6. ![]() К
К3
=ℓ3∩(S3
К),
К0=(S3К3)∩(В0С0),
К′=(S2К0)∩ℓ1
.
К
К3
=ℓ3∩(S3
К),
К0=(S3К3)∩(В0С0),
К′=(S2К0)∩ℓ1
.
7. L∞![]() ℓ1,
L0=(S2L3)∩(В0С0),
L3=(S3L0)∩ℓ3,
L=(S1L3)∩ℓ1.
ℓ1,
L0=(S2L3)∩(В0С0),
L3=(S3L0)∩ℓ3,
L=(S1L3)∩ℓ1.
8. Построение прообразов в обратном порядке (самостоятельно).
Задача. Дана гиперболическая инволюция и даны инвариантные точки М1 и М2 . Построить образ и прообраз произвольной точки А.
Р ешение.
По свойству (4) → (АА′,
М1М2)=
- 1. Т.о. задача сводится к построению
четвертой гармонической точки. Аналогично
строится прообраз точки.
ешение.
По свойству (4) → (АА′,
М1М2)=
- 1. Т.о. задача сводится к построению
четвертой гармонической точки. Аналогично
строится прообраз точки.
Задача.
Даны точки А![]() ↔ А′
↔ А′![]() и В
и В
![]() ↔
В′
↔
В′![]() .
Найти уравнение инволюции.
.
Найти уравнение инволюции.
Решение.
Пусть матрица инволюции М=![]() ,
тогда формулы λ∙Х
′ = М∙Х
и λ∙Х =
М∙Х
′.
,
тогда формулы λ∙Х
′ = М∙Х
и λ∙Х =
М∙Х
′.
Подставим точки:
λ1∙А′=
М∙А
![]()
 ,
,
λ2∙А=
М∙А′
![]()
 ,
,
λ3∙В′=
М∙В
![]()
 ,
,
λ4∙В=
М∙В′
![]()
 .
.
 .
.
Одно из решений
а
= 7, b=
- 5, с= 2,
![]() М=
М=![]() .
.
Уравнение инволюции:
λ∙Х ′
=
![]() ∙Х.
∙Х.
Задача.
Известны неподвижные точки инволюции
- М1
![]() и
М2
и
М2
![]() ,
найти её уравнение.
,
найти её уравнение.
Решение. Пусть
матрица инволюции М=![]() ,
,
тогда формулы преобразования λ∙Х′= М∙Х и λ∙Х= М∙Х′, для инвариантных точек λ∙Х= М∙Х .
Подставим наши точки: λ1∙М1= М∙М1, λ2∙М2= М∙М2 .


 .
.
Одно из решений
а
= -5, b=
3, с= -
8,
![]() М=
М=![]() .
.
Уравнение инволюции:
λ∙Х ′
=
![]() ∙Х
.
∙Х
.
Задача.
Найти неподвижные точки инволюции
 .
.
Решение.
Матрица инволюции М=![]() .
.
Тогда характеристическое
уравнение λ
2
- 92
–(-8)∙7
= 0
![]() λ 2=
25
λ 2=
25
![]() λ =
± 5.
λ =
± 5.
При λ1
= 5,
![]() ∙
∙![]() =
=![]()
![]()
![]() х1
= 2∙х2
,
х1
= 2∙х2
,
![]() М1
=
М1
=
![]() .
.
При λ
2 = -5
,
![]() ∙
∙![]() =
=![]()
![]()
![]() 7∙х1
= 4∙х2
,
7∙х1
= 4∙х2
,
![]() М2
=
М2
=
![]() .
.