

PHOTOMOD 5.0
•Измерения на несоседних маршрутах  – отображается “+”, если точка измерена на снимках не на соседних маршрутов, или “-”, если нет
– отображается “+”, если точка измерена на снимках не на соседних маршрутов, или “-”, если нет
•Коффициент корреляции  – отображается коэффициент корреляции, в случае, если точка была измерена с использованием коррелятора
– отображается коэффициент корреляции, в случае, если точка была измерена с использованием коррелятора
• – отображает поперечный параллакс (в пикселах или миллиметрах) в в случае открытых стереопар в модуле Измерение точек с выполненным взаимным ориентированием.
– отображает поперечный параллакс (в пикселах или миллиметрах) в в случае открытых стереопар в модуле Измерение точек с выполненным взаимным ориентированием.
• – отображает ошибку в триплете в плане, для точки, измеренной в тройном перекрытии (в пикселах или миллиметрах) в случае открытых триплетов в модуле Измерение точек.
– отображает ошибку в триплете в плане, для точки, измеренной в тройном перекрытии (в пикселах или миллиметрах) в случае открытых триплетов в модуле Измерение точек.
• – отображает ошибку в триплете по высоте, для точки, измеренной в тройном перекрытии (в пикселах или миллиметрах) в случае открытых триплетов в модуле Измерение точек.
– отображает ошибку в триплете по высоте, для точки, измеренной в тройном перекрытии (в пикселах или миллиметрах) в случае открытых триплетов в модуле Измерение точек.
Список можно отсортировать по любому полю. Для этого нажмите на название поля списка.
Допуски на ошибки при выполнении взаимного ориентирования:
Рекомендуемый допуск на коэффициент корреляции – 0.9-0.95 Максимальный поперечный параллакс не должен превышать размер пиксела
Значения допусков на максимальную ошибку в триплетах можно рассчитать по следующей формуле:
Emax ≈ 2 Eср , где Eср - допуск на среднюю ошибку
Средние ошибки в плане не должны превышать половины размера пиксела, умноженного на √2, а по высоте – средней ошибки в плане, умноженной на отношение фокусного расстояния камеры (f) к базису съемки (b):
Eсрxy =  2 0.5пикс
2 0.5пикс
Eсрz = bf Eсрxy
4.4.1.3 Параметры измерения точек
Поиск и измерение связующих точек (идентичных точек на паре растровых изображений) в системе PHOTOMOD может осуществляться автоматически с использованием алгоритма корреляции, который сопоставляет соответствующие фрагменты изображений по максимуму взаимного коэффициента корреляции.
© 2009 |
86 |
Измерение сети |
ноябрь 2009 |
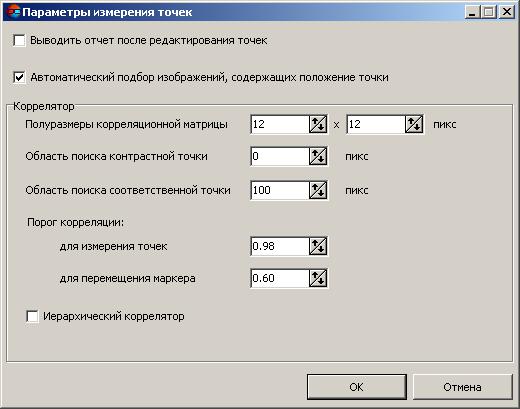
Параметры коррелятора
Окно содержит общие параметры:
•Выводить отчет после редактирования точек – открывает отчет после нажатия кнопки ОК в модуле Измерение точек.
•Автоматический подбор изображений, содержащих положение точки –
опция определяет режим показа изображений в модуле Измерение точек при использовании кнопки  Показать точку на снимках для выбранной в списке точки: включенная опция (по умолчанию) определяет режим показа всех снимков, содержащих выбранную точку, а также изображений, которые могут содержать эту точку (но на которых она не была измерена); отключенная опция задает режим отображения только тех снимков, на которых точка измерена.
Показать точку на снимках для выбранной в списке точки: включенная опция (по умолчанию) определяет режим показа всех снимков, содержащих выбранную точку, а также изображений, которые могут содержать эту точку (но на которых она не была измерена); отключенная опция задает режим отображения только тех снимков, на которых точка измерена.
Использование кнопки  при нажатой клавише Alt позволяет временно переключить режим.
при нажатой клавише Alt позволяет временно переключить режим.
Следующие параметры относятся к использованию коррелятора при измерении связующих точек (инструменты  ,
,  основного окна модуля Измерение точек):
основного окна модуля Измерение точек):
•Полуразмер корреляционной матрицы – определяет размеры корреляционной матрицы по осям X и Y, выраженными в пикселах.
•Область поиска контрастной точки – определяет область (в пикселах), в
которой будет осуществляться поиск максимально контрастной точки. Параметр может быть полезен, например, для материала с большим процентом однотонных областей.
•Область поиска соответственной точки – определяет область (в пикселах), в
пределах которой будет осуществляться поиск точки, соответствующей точке “левого” снимка, с использованием коррелятора (определят область вокруг маркера).
•Порог корреляции – значение подбирается исходя из качества материала. Найденные соответственные точки, значение порога корреляции которых выше или равно установленному значению Порог корреляции для измерения точек
87 |
РАКУРС, 129366, Москва, ул. Ярославская, д.13-А |

PHOTOMOD 5.0
автоматически предлагаются в окне Новая точка (будут выделены галочкой). Точки, значения порога корреляции которых находится в диапазоне от установленного порога для перемещения маркера до порога для измерения точек, также появятся в списке, но не будут предлагаться автоматически в окне Новая точка. Оценивая коэффициент корреляции, выберите снимки для добавления новой связующей точки. Точки с порогом корреляции ниже значения Порога для перемещения маркера не будут рассматриваться для добавления, будет выдаваться сообщение “Плохая точка”.
•Иерархический коррелятор – используется для поиска точек по прореженному изображению (при масштабах мельче 1:1)
4.4.1.4Измерение области поиска соответственной точки
Вмодуле Измерение точек можно измерить область поиска соответствующей точки, т.е. оценить ошибку соответствия (совпадения) снимков в областях перекрытия, которая может быть достаточно большой в результате недостаточной точности накидного монтажа, что повлияет в свою очередь на точность измерений точек в автоматическом режиме.
Возможность оценить эту ошибку позволяет учесть ее при выполнении
автоматического измерения точек триангуляции (см. описание параметра Размер области поиска соответственной точки на закладке Поиск точек в разделе Дополнительные параметры измерения).
Для измерения соответствия точек:
•откройте любые стереопары в модуле Измерение точек. Рекомендуется оценить соответствие на разных маршрутных, а также межмаршрутных стереопарах,
•двойным щелчком мыши укажите какую-либо точку снимка в месте перекрытия
– на других снимках отобразится та же “местность” с маркером в предполагаемом месте соответствующей точки.
•Измерьте разницу между выбранной точкой и местоположением маркера с помощью горячей клавиши D: первое нажатие - начать измерительный отрезок при нажатой левой кнопки мыши, второе - закончить (выключить режим измерения расстояния). Расстояние в пикселах будет подписываться прямо на отрезке.
© 2009 |
88 |