

Ushkac_Mehanika
.pdfМІНІСТЕРСТВО ОСВІТИ І НАУКИ УКРАЇНИ Національнийуніверситеткораблебудування імені адмірала Макарова
М. В. Ушкац, С. С. Коваль
МЕХАНІКА. МОЛЕКУЛЯРНА ФІЗИКА І ТЕРМОДИНАМІКА
Під редакцією О.О. Мочалова
Рекомендовано Міністерством освіти і науки України як навчальний посібник для студентів вищих навчальних закладів
Миколаїв 2009
УДК 530.1 |
Рекомендовано Міністерством освіти і науки |
ББК 22.3(075.8) |
України як навчальний посібник для студентів ви- |
У 95 |
щих навчальних закладів, лист № 1.4/18-Г-1450 |
|
від 19.06.2008 р. |
Рецензент: І.О. Муленко, доктор фізико-математичних наук, професор
Ушкац М.В., Коваль С.С.
У 95 Механіка. Молекулярна фізика і термодинаміка: Навчальний посібник / Під ред. О.О. Мочалова. – Миколаїв: НУК, 2009. – 184 с.
ISBN 978–966–321–115–2
Наведенотеоретичнівідомостійзадачізприкладамирозв'язуваннядлясамостійної роботипрививченні розділівзагальногокурсуфізики "Механіка" та "Молекулярнафізикаітермодинаміка".
Призначенийдлястудентівтехнічнихспеціальностей.
УпідборізадачбралиучастьвикладачікафедрифізикиНУК: О.О. Таранчук, М.В. Ушкац, А.Д. Кулік – розд. "Механіка"; Н.І. Коваль, С.С. Коваль, Л.І. Стратієнко – розд. "Молекулярна фізика і термодинаміка".
УДК 530.1 ББК 22.3(075.8)
ISBN 978–966–321–115–2 |
© Ушкац М.В., Коваль С.С., 2009 |
|
© ВидавництвоНУК, 2009 |
||
|
ВСТУП
Фізика – це наука, що вивчає загальні властивості руху речовини і поля.
(А.І. Йоффе).
Фізика – наука про прості форми руху матерії та відповідні їм найбільш загальні закони природи. Форми руху матерії (механічна,
теплова, електрична, магнітна і т. д.), що вивчаються фізикою, є складовимивсіхвідомихформрухуматерії(хімічних, біологічнихтощо), тому фізикаєосновоюдляіншихприродничихнаук(астрономія, біологія, хімія, геологія та ін.).
Фізика як база для створення нових галузей техніки – фундаментальнаосновапідготовкиінженера.
Усвоїйосновіфізика– експериментальнанаука: їїзаконибазуються на фактах, установлених дослідним шляхом. У результаті узагаль-
ненняекспериментальнихфактівустановлюютьсяфізичнізакони– стійкі об'єктивні закономірності, що повторюються, існують у природі, встановлюють зв'язок між фізичними величинами. Цей зв'язок завжди виражається за допомогою універсального математичного апарату (дод.
А–М).
Длявстановленнятакихкількіснихматематичнихспіввідношеньміж фізичними величинами їх необхідно виміряти, тобто порівняти з відповідними еталонами. Із цією метою вводиться система одиниць, що постулювалаосновніодиниціфізичнихвеличин, набазіякихвизначають одиницірештифізичнихвеличин, якіназиваютьсяпохідними.
4 |
ВСТУП |
|
|
Міжнародна система одиниць (СІ) (System International – SI)
Основні одиниці
Метр (м) – довжина шляху, який проходить світло у вакуумі за
1/299792458 с.
Кілограм (кг) – маса, що дорівнює масі міжнародного прототипу кілограма(платиноіридієвогоциліндра, щозберігаєтьсявМіжнародному бюро мір та ваги у Севрі, поблизу Парижа).
Секунда (с) – час, що дорівнює 9 192 631 770 періодам випромінювання, відповідногопереходуміждвоманадтонкимирівнямиосновного стану атома цезію-133.
Ампер(А) – незмінюванасиластруму, якийприпроходженніподвох паралельних прямолінійних провідниках нескінченної довжини і дуже малого поперечного перетину, розташованих у вакуумі на відстані 1 м одинвідодного, створюєміжцимипровідникамисилу, щодорівнює2 10–7 Н на кожен метр довжини.
Кельвін (К) – 1/273,16 частина термодинамічної температури потрійноїточкиводи.
Моль(моль) – кількістьречовинисистеми, щоміститьусобістільки ж структурних елементів, скільки атомів міститься в 12 г ізотопу вуглецю 12С.
Кандела (кд) – сила світла в заданому напрямі джерела, що випускає монохроматичне випромінювання частотою 540...1012 Гц, енергетична сила світла якого в цьому напрямі складає 1/683 Вт/ср.
Додаткові одиниці системи СІ
Радіан (рад) – кут між двома радіусами кола, довжина дуги між якимидорівнюєрадіусу.
Стерадіан (ср) – тілесний кут з вершиною в центрі сфери, що вирізаєнаповерхні сфери площу, яку маєквадрат зі стороною, щодорівнює радіусусфери.
Похідніодиницівстановлюютьсянаосновіфізичнихзаконів, щопо- в'язуютьїхзосновнимиодиницями. Наприклад, похіднаодиницяшвидкості (1 м/с) визначається з формули рівномірного прямолінійного руху v = s/t.
Розділ 1. МЕХАНІКА
Механіка – це частина фізики, яка вивчає закономірності механічного руху і причини, що викликають або змінюють цей рух.
Механічний рух – це зміна взаємного розташування тіл або їх частин у просторі із часом.
Зазвичайпідмеханікоюрозуміютькласичнумеханіку, вякійрозглядаютьсярухимакроскопічнихтіл, щоздійснюютьсязішвидкостями, убагато разів меншими від швидкості світла у вакуумі. Закони руху тіл зі швидкостями, порівнянними зішвидкістю світла у вакуумі, вивчаються
релятивістською механікою. Квантова механіка вивчає закони руху атомів і елементарних частинок.
Умеханіцівиділяютьтриосновнірозділи.
Кінематикавивчаєрухтіл, нерозглядаючипричин, якіцейрухобумовлюють.
Динамікавивчаєзаконирухутіліпричини, яківикликаютьабозмінюють цей рух.
Статика вивчає закони рівноваги системи тіл.
Дляопису рухутілзалежно відумовконкретнихзавдань умеханіці використовуютьсянаступніспрощеніфізичнімоделі:
матеріальна точка – тіло, форма і розміри якого несуттєві в умовах даного завдання;
абсолютно тверде тіло – тіло, деформацією якого в умовах даного завдання можна нехтувати і відстань між будь-якими двома точками якогозалишаєтьсяпостійною;
абсолютно пружне тіло – тіло, деформація якого описується закономГука, апісляприпиненнязовнішньоїсиловоїдіївоноповністювідновлюєсвоїпервиннірозміриіформу;
абсолютно непружне тіло – тіло, що повністю зберігає деформованийстанпісляприпиненнядіїзовнішніхсил.
Будь-який рух твердого тіла можна представити як комбінацію поступального та обертального рухів.
Поступальний рух – це рух, при якому будь-яка пряма, жорстко пов'язана з тілом, залишається паралельною своєму первинному положенню. При поступальному русі всі точки тіла рухаються абсолютно однаковоідостатньоописатипараметрирухуоднієїточки, томувикори-
стовують модель матеріальної точки.

6 |
Розділ1. МЕХАНІКА |
|
|
Обертальний рух – це рух, при якому всі точки тіла рухаються по колах, центриякихлежатьнаоднійітійжепрямій, щоназиваєтьсявіссю обертання.
1.1. Кінематика поступального та обертального рухів
Система відліку. Траєкторія, шлях, переміщення
Рух тіл відбувається в просторі та часі. Тому для опису руху матеріальної точки треба знати, в яких місцях простору вона знаходилася і в які моменти часу проходила те або інше положення.
Тіло відліку – довільно вибране тіло, відносно якого визначається положення інших тіл.
Система відліку – сукупність системи координат і годинника,
|
|
|
|
Z |
|
пов'язаних з тілом відліку. |
||
z |
|
|
|
|
|
Найчастіше використовують декар- |
||
|
|
|
|
|||||
|
|
|
|
|
|
товусистемукоординат, базисякоїутво- |
||
r |
|
|
rr |
M(x, y, z, t) |
рений трьома одиничними за модулем |
|||
k |
|
|
|
y Y |
і взаємно ортогональними векторами |
|||
|
|
|
||||||
|
|
|
|
|
r |
r |
r |
|
Or |
|
|
|
rj |
|
i , |
j, k (дод. А), проведеними з початку |
|
|
|
|
|
|||||
i |
|
|
|
|
координат (рис. 1.1). |
|||
x |
|
|
|
|
|
|
Положення довільної точки М у мо- |
|
X |
|
|
|
|
мент часу t у будь-якій системі коорди- |
|||
|
|
|
|
Рис. 1.1 |
|
|||
|
|
|
|
|
нат відносно тіла відліку (початку коор- |
|||
|
|
|
|
|
|
|||
динат О) характеризують радіусом-вектором rr, що сполучає О з точ- |
||||||||
коюМ:
rr = x ir+ y rj + z kr;
rr = r = x2 + y2 + z2 .
Рух матеріальної точки повністю визначений, якщо декартові координати матеріальної точки задані у залежності від часу:
x= x(t);
y= y(t);
z= z(t).
1.1. Кінематика поступального та обертального рухів |
|
7 |
|||||
Ці рівняння називаються кінематичними рівняннями руху точки. |
|||||||
Вониеквівалентніодномувекторномурівняннюрухуточки: rr |
= rr(t) . Лінія, |
||||||
описана рухомою матеріальною точкою (або тілом) відносно вибраної |
|||||||
системи відліку, називається траєкторією. Рівняння траєкторії можна |
|||||||
одержати, виключивши параметрt з кінематичних рівнянь. |
|
||||||
Залежновідформитраєкторіїрухможебутипрямолінійнимабокри- |
|||||||
волінійним. |
|
|
|
|
|
|
|
Довжиною шляху, або шляхом точки називається сума довжин усіх |
|||||||
ділянок траєкторії, пройдених цієюточкоюзаданийпроміжокчасу ∆t = |
|||||||
= t2 – t1. Шлях – скалярна функція часу ∆s = ∆s(∆t). |
|
|
|||||
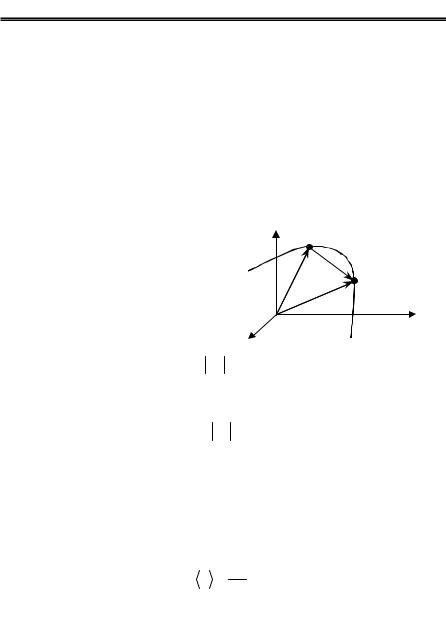
Вектор переміщення |
∆rr = rr2 − rr1 – вектор, |
проведений з почат- |
|||||
кового положення рухомої точки |
|
M(x1, y1, z1, t1) |
|
||||
в її положення в даний момент часу |
Z |
|
|||||
(рис. 1.2) – приріст радіуса-вектора |
|
|
∆rr |
∆s |
|
||
точки за даний проміжок часу ∆t: |
|
rr1 |
M(x2 , y2 , z2 , t2) |
||||
∆rr = rr2 − rr1 |
= rr(t2 ) − rr |
(t1) = |
O |
|
rr2 |
|
Y |
r |
r |
r |
|
|
|
|
|
= ∆x i + ∆y j + ∆z |
k. |
X |
|
|
|
|
|
Довжина переміщення ∆r = ∆rr |
|
|
Рис. 1.2 |
|
|||
|
|
|
|
|
|||
і шлях ∆s можуть відрізнятися, але при ∆t → 0 (за елементарний про- |
|||||||
міжок часу dt) |
|
|
|
|
|
|
|
|
|
ds = drr = dr. |
|
|
|
|
|
Лінійна швидкість |
|
|
|
|
|
|
|
Швидкість – це векторна величина, яка визначає як швидкість |
|||||||
руху, так і його напрям у даний момент часу. |
|
|
|
||||
Вектором середньої швидкості за інтервал часу ∆t називається |
|||||||
відношення приросту ∆rr радіуса-вектора точки до проміжку часу ∆t: |
|||||||
|
|
r |
∆rr |
|
|
|
|
|
|
v = |
∆t . |
|
|
|
|
Напрям вектора середньої швидкості співпадає з напрямом ∆rr. |
|||||||
Одиниця швидкості – м/с. |
|
|
|
|
|
||

8 |
Розділ1. МЕХАНІКА |
|
|
Миттєва лінійна швидкість – векторна величина, що дорівнює першій похідній (дод. Г) за часом від радіуса-вектора rr даної точки:
vr = lim |
∆rr |
= |
drr |
. |
∆t |
|
|||
∆t→0 |
|
dt |
||
У декартовій системі складові вектора vr визначаються як похідні відповіднихкоординатточки:
vrx = dxdt ;
vry = dydt ;
vrz = dzdt .
Вектормиттєвоїшвидкостізавждиспрямованийподотичнійдотраєкторіїубікруху. Модульмиттєвоїшвидкості(скалярнавеличина) дорівнюєпершійпохіднійшляхузачасом:
v = vr = |
lim |
|
∆rr |
|
|
= |
lim |
∆s |
= ds . |
|
|
||||||||
|
∆t |
∆t |
|||||||
|
∆t→0 |
|
|
∆t→0 |
dt |
||||
При нерівномірному русі модуль миттєвої швидкості із часом змінюється. Тому можна ввести скалярну величину  v – середню швидкістьнерівномірногоруху(іншаназва– середняшвидкістьшляху):
v – середню швидкістьнерівномірногоруху(іншаназва– середняшвидкістьшляху):
v = ∆∆st .
Переміщенняточки ∆rr, змінуїїкоординат∆x, ∆y, ∆z іпройденийшлях ∆s за проміжок часу ∆t (від t1 до t2) обчислюють як інтеграли (дод. Ж):
t2
∆rr = ∫vr(t) dt;
t1

1.1. Кінематика поступального та обертального рухів |
9 |
||
|
|
|
|
t2 |
t2 |
t2 |
|
∆x = ∫vx (t) dt; ∆y = ∫vy (t) dt; ∆z = ∫vz (t) dt; |
|
||
t1 |
t1 |
t1 |
|
|
t |
2 |
|
|
∆s = ∫v(t) dt. |
|
|
|
t1 |
|
|
Припрямолінійномурусіточкинапрямвекторашвидкостізалишаєтьсянезмінним.
Рух точки називається рівномірним, якщо модуль її швидкості не змінюється із часом (v = const), для нього
s = v ∆t.
Якщо модуль швидкості збільшується із часом, то рух називається
прискореним, якщо ж він убуває із часом, то – сповільненим.
Лінійне прискорення
Прискорення – це векторна величина, що характеризує зміну швидкості із часом за модулем і напрямом.
Середнє прискорення в інтервалі часу ∆t – векторна величина, що дорівнюєвідношеннюзмінишвидкості ∆vr доінтервалучасу∆t:
ar = ∆vr.
∆t
Миттєве лінійне прискорення матеріальної точки – векторна величина, щодорівнюєпершійпохіднійшвидкостіданоїточки(другоїпохідної від радіуса-вектора цієї ж точки) за часом:
r |
= lim |
∆vr |
= |
d vr |
= |
d 2rr |
|
|
a |
∆t |
|
|
. |
||||
dt |
dt2 |
|||||||
|
∆t→0 |
|
|
|
Одиницяприскорення– м/с2.
У декартовій системі складові вектора прискорення визначаються якпохіднівідповіднихскладовихшвидкостіабодругіпохіднікоординат точки:
10 |
Розділ1. МЕХАНІКА |
|
|
ax =
ay =
az =
dv |
x |
|
|
= |
d 2 x |
; |
|
||||
dt |
|
dt 2 |
|
||||||||
|
|
|
|
|
|||||||
d vry |
= |
|
|
d 2 y |
; |
||||||
dt |
|
|
dt |
2 |
|
|
|||||
|
|
|
|
|
|
||||||
d vrz |
|
= |
d 2 z |
. |
|||||||
|
|
||||||||||
dt |
|
|
|
dt 2 |
|
|
|
||||
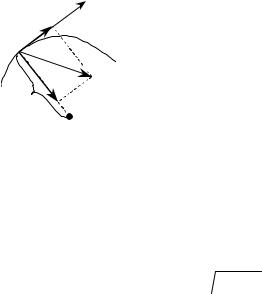
Узагальномувипадкукриволінійногорухувекторприскореннязручно представитиувиглядісумидвохпроекцій:
ar = arn + arτ .
Тангенціальне прискорення arτ характеризує зміну модуля швидкостіізчасом. Цейвекторспрямованийподотичнійдотраєкторії(рис. 1.3)
|
vr |
унапрямкушвидкостіприприскореномуіпротилеж- |
||
arτ |
ноприсповільненомурусі, айоговеличина |
|||
|
|
|
aτ = dv . |
|
|
r |
|
|
|
|
a |
|
|
dt |
|
arn |
|
|
r |
R |
|
Нормальне (доцентрове) прискорення an на- |
||
O |
правленепонормалівідтраєкторіїдоцентраїїкри- |
|||
|
Рис. 1.3 |
визниО(див. рис. 1.3) іхарактеризуєзмінунапряму |
||
|
вектора швидкості точки. Величина нормального |
|||
|
|
|||
прискорення an |
пов'язана з модулем швидкості v і величиною радіуса |
|||
кривизнитраєкторіїR: |
|
|
||
|
|
an = |
v2 |
. |
|
|
R |
||
|
|
|
|
|
Величинаповногоприскорення
a =  an2 + aτ2 .
an2 + aτ2 .
Зміни вектора швидкості точки ∆vr, його складових ∆vx, ∆vу, ∆vz і модуля ∆v за проміжок часу ∆t (від t1 до t2) знаходяться як інтеграли: