

Ushkac_Mehanika
.pdf1.1. Кінематика поступального та обертального рухів |
11 |
|
|
|
|
|
t2 |
|
|
∆vr = ∫ar(t) dt; |
|
|
t1 |
|
t2 |
t2 |
t2 |
∆vx = ∫ax (t) dt; ∆v y = ∫a y (t) dt; ∆vz = |
∫az (t) dt; |
|
t1 |
t1 |
t1 |
|
t2 |
|
|
∆v = ∫aτ (t) dt. |
|
|
t1 |
|
Види поступального руху
1.arτ = 0, arn = 0 – прямолінійнийрівномірнийрух: ar = 0.
2.aτ = a = const, arn = 0 – прямолінійнийрівнозмінний(рівноприскоренийаборівносповільнений) рух. Якщоt0 = 0, то
|
aτ = a = ∆v = |
v − v0 |
= |
v − v0 |
; |
|||
|
|
|
|
|||||
|
∆t |
|
t − t0 |
t |
||||
|
v = v0 + at; |
|
|
|
||||
|
t |
|
|
|
|
at 2 |
||
|
s = ∫(v0 + at) dt = v0t + |
|||||||
|
|
. |
||||||
|
2 |
|||||||
|
0 |
|
|
|
|
|
|
|
3. arτ = 0, |
an = const = v2 / R |
– рівномірнийрухпоколу. |
||||||
4. arτ ≠ 0, |
arn ≠ 0 – криволінійнийзміннийрух. |
|||||||
Кінематика обертального руху
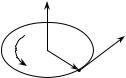
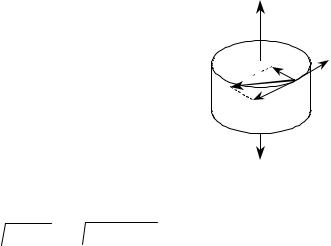
Зміну положення тіла у просторі за час ∆t при обертанні задають r
вектором кутового переміщення ∆ϕ, модуль якого дорівнює куту повороту (в радіанах), а напрям співпадає з напрямом поступального руху вздовж осі обертання правого гвинта (рис. 1.4). За елементарний проміжок часу dt тіло здійснює нескінченно мале кутове переміщення dϕr.

12 |
Розділ1. МЕХАНІКА |
|
|
Кутовою швидкістю називають величину, що дорівнює куту по- |
|||||
вороту тіла в одиницю часу. |
r |
|
|||
Вектор миттєвої кутової швидкості ω є похідною від кута повороту |
|||||
r |
|
тіла за часом: |
|
r |
|
|
|
r |
|||
∆ϕr |
|
|
|||
∆ ϕ |
|
|
ω = dϕ . |
||
|
∆s |
r |
|
dt |
|
∆ϕ |
завжди спрямований уздовж осі |
||||
∆s |
Вектор ω |
||||
R |
|
|
|
r |
|
|
обертання, як і вектор dϕ, тобто за правилом пра- |
||||
|
|
вогогвинта, айогомодульдорівнюєкутуповоро- |
|||
|
|
ту тіла в одиницю часу: |
|
||
|
|
|
ω = dϕ . |
||
|
|
|
|
dt |
|
Рис. 1.4. Зміну кутової швидкості із часом характери- r зує кутовеприскорення. Векторкутовогоприскорення ε є похідною від вектора кутової швидкості (другою похідною
кута повороту) за часом:
|
|
r |
|
d 2 |
r |
|
εr |
= |
dω |
= |
ϕ |
. |
|
dt |
|
|
||||
|
|
|
dt 2 |
|||
Якщовісьобертаннянерухома, товектор εr направленийrуздовжосі обертанняr в сторону вектора приросту кутової швидкості ( ε спрямований, як ω приприскореномуобертанні, йпротилежно– присповільненому). Прицьомуйогомодульдорівнюєпохіднійвідмодулякутовоїшвидкості
ε = |
dω |
= |
d 2ϕ |
. |
|
dt |
dt 2 |
||||
|
|
|
Одиницікутовоїшвидкостітакутовогоприскорення– рад/сірад/с2 відповідно.
Якщо відома залежність кутового прискорення із часом, то можна знайтиприрісткутовоїшвидкостітілазабудь-якийпроміжокчасу∆t (від t1 до t2):
t2
∆ω = ∫ε(t) dt.
t1

1.1. Кінематика поступального та обертального рухів |
13 |
|
|
Інтегралкутовоїшвидкостівінтервалічасу∆t визначаєкут, наякий повернеться тіло за цей час:
t2
∆ϕ = ∫ω(t) dt.
t1
При рівномірному обертанні ω = ddtϕ = const , тобто ϕ = ωt.
Рівномірнеобертанняможнахарактеризуватитакожперіодомобертання Т – часом, за який точка здійснює один повний оберт:
T = 2ωπ .
Частотаобертанняν – числообертів, щоздійснюютьсятіломводиницючасу:
ν = T1 = 2ωπ .
Одиниця частоти обертання – герц (Гц).
Прирівноприскореному обертальному русі ε = const
ω= ω0 + εt ;
ϕ= ω0t + εt2 . 2
Зв'язок лінійних і кутових характеристик руху r
Коли тіло здійснює кутове переміщення ∆ϕ, будь-яка його точка на відстаніR відосіобертанняпройдепосвоїйтраєкторії(колу) шлях(див.
рис. 1.4)
∆s = R ∆ϕ .
Миттєва лінійна швидкість точки теж пов'язана з кутовою швидкістюірадіусомтраєкторіїспіввідношенням
v = lim |
∆s |
= lim |
R ∆ϕ |
= R lim |
∆ϕ |
= ωR. |
|
∆t |
∆t |
∆t |
|||||
∆t→0 |
∆t→0 |
∆t→0 |
|
14 |
|
|
Розділ1. МЕХАНІКА |
|
|
||||
У векторному вигляді формулу для лінійної швидкості можна запи- |
||||
сати як векторний добуток: |
|
|
||
|
r |
r |
r |
|
|
v |
= [ω× R]. |
||
За визначенням векторного добутку (дод. В) його напрям співпадає |
||||
|
|
|
r |
|
знапрямомпоступальногоrрухуправогогвинтаприйогообертаннівід ω |
||||
rr |
до R (рис. 1.5). |
|
||
ω |
При обертанні кожна точка тіла рухається по |
|||
υr vr |
||||
колу, а тому має певне нормальне прискорення |
||||
r |
an = v2 |
|
|
|
RRr |
= |
ω2 R2 |
= ω2 R. |
|
Рис. 1.5 |
R |
|
R |
|
Якщо тіло обертається з кутовим прискоренням εr, то кожна його точка на відстані R від осі обертання рухається з тангенціальним прискоренням
aτ = εR,
або у векторному вигляді
arτ = [εr× Rr].
Приклади розв'язування задач |
15 |
|
|
Приклади розв'язування задач
Приклад 1. Точка рухається по прямій лінії згідно з рівнянням x = = 6t – t3/8 (х вимірюється в метрах, t – y секундах). Визначити середній модуль швидкості руху точки в інтервалі часу від t1 = 2 с до t2 = 6 c.
|
|
Аналіз і розв'язок |
|
|
|
|||||||
|
|
Точка рухається пря- |
|
|
r |
|
|
|
||||
|
x = 6t – t3/8 |
молінійновздовжгоризон- |
|
F |
|
∆x24 |
|
|
||||
|
|
|
|
|
||||||||
|
t0 = 0 |
тальної осі Оx (рис. 1.6). |
|
|
|
t6 |
t2 |
t′ |
||||
|
t2 = 2 c |
|
|
|
||||||||
|
З наведеного рівняння |
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|||||
|
t6 = 6 c |
|
O |
|
x |
|||||||
|
можна визначити поло- |
|
∆x46 |
|||||||||
|
a ≠ const |
ження точки в будь-який |
|
|
|
|
|
|
||||
|
a < 0 |
|
|
|
|
Рис. 1.6 |
|
|
||||
|
проміжок часу. Середня |
|
|
|
|
|
|
|||||
|
a = f (t) |
швидкість визначається за формулою V = ∆x / ∆t. |
Не- |
|||||||||
|
∆t = t6 – t2 |
|||||||||||
|
обхідно зробити аналіз форми руху точки. Спочатку ви- |
|||||||||||
|
<V> – ? |
|||||||||||
|
значаємомиттєвушвидкістьякпохіднувідкоординатиx |
|||||||||||
|
|
|||||||||||
занезалежноюзмінноюt: |
|
|
|
|
|
|
|
|
|
|
||
|
|
V = |
dx |
= 6 − |
3 |
t |
2 |
. |
|
|
|
|
|
|
dt |
8 |
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
||
Прискорення визначається як похідна від миттєвої швидкості за незалежноюзмінноюt:
a = dVdt = − 68 t = − 34 t.
Рухточкисповільнений, модульприскоренняізчасомзростає. Сила, яканадаєточціприскорення, направленапротилежноруху.
Визначимошвидкістьточкивкінці2 і6-їс:
V2 = 6 − 83 t22 = 6 − 83 22 = 4,5 м/с;
V6 = 6 − 83 t62 = 6 − 83 62 = −7,5 м/с.
Треба з'ясувати, в який момент часу t' миттєва швидкість змінює знак (+) на (–):

16 |
Розділ1. МЕХАНІКА |
|
|
V ′ = 6 − 83 t′2 = 0; t′ =  16 = 4 с.
16 = 4 с.
У момент часу t' = t4 = 4 с сила зупинить точку, потім точка почне рухатися в протилежному напрямку. Прискорення не змінює напряму і гальмівна сила діє в тому ж напрямі:
∆x = ∆x42 + x64 ;
|
∆x |
42 |
= x |
4 |
− x |
|
|
= 6t |
4 |
− |
t43 |
|
− 6t |
2 |
+ |
t23 |
|
= 5 м; |
|||||||||||
|
|
|
|
|
|
||||||||||||||||||||||||
|
|
|
|
|
2 |
|
|
|
|
|
|
8 |
|
|
|
8 |
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
∆x |
|
= |
|
x − x |
4 |
|
= |
|
6t |
6 |
− |
t63 |
− 6t |
4 |
+ |
t43 |
|
= 7 м; |
||||||||||
|
|
|
|
|
|
||||||||||||||||||||||||
|
|
|
|
||||||||||||||||||||||||||
|
|
|
|
||||||||||||||||||||||||||
|
64 |
|
|
|
6 |
|
|
|
|
|
|
|
8 |
|
|
8 |
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
V = |
∆x42 |
+ ∆x64 |
= |
5 + 7 |
|
= 3 м/с; |
||||||||||||||||||||
|
|
|
|
|
|
∆x |
|
|
|
|
4 |
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
[V ]= [[∆x]] м/с.
∆t
Відповідь: модуль середньої швидкості дорівнює 3 м/с.
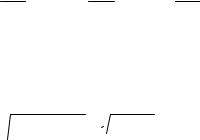
Приклад 2. Радіус-векторr матеріальної точки визначається за виразом rr = 3t 2ir + 4t 2 rj + 7k м. Знайтишвидкість V іприскоренняa точки; модульшвидкостівмоментt1 = 2с; шляхS, пройденийпротягомперших 10 с руху; модуль переміщення ∆r за цей же час. Проаналізувати знайдений результат.
Аналіз і розв'язок
V0 |
= 0 |
|
Згідно з даним виразом для радіуса-вектора його |
|
|||
|
проекціїнаосікоординат(координатиматеріальноїточ- |
||
t0 |
= 0 |
|
|
|
ки) знаходяться: |
||
t1 = 2 c |
|
||
|
x = 3t2 ; y = 4t2 ; z = 7. |
||
t2 = 10 c |
|
||
V1 |
– ? a – ? |
|
Бачимо, що координата z точки залишається із |
S2 – ? ∆r2 – ? |
|
часомнезмінною(точкарухаєтьсявплощині, перпен- |
|
|
|||
Приклади розв'язування задач |
17 |
|
|
дикулярнійосіz). Крімтого, координатиточкиупочатковиймоментчасу
(t = 0)
x(0) = 0; y(0) = 0; z(0) = 7.
Визначимо миттєву швидкість як похідну від вектора rr за часом. Вонанаправленаупросторіподотичнійдотраєкторіївбікруху:
|
|
|
r |
drr |
|
r |
r |
|
|
|
|
|
V = |
|
|
= 6ti |
+ 8tj. |
|
|
|
|
|
dt |
|
|||||
|
|
|
|
|
|
|
|
||
Якщопредставитивектор Vr |
черезйогопроекціїнакоординатніосі, |
||||||||
r |
r |
r |
|
r |
|
|
|
|
|
то одержимо V |
= Vxi + Vy j |
+ Vz k. У даному випадку |
|||||||
|
Vx = dx |
= 6t; Vy |
= dy |
= 8t; Vz = dz |
= 0. |
||||
|
dt |
|
|
|
|
dt |
|
dt |
|
У початковий момент часу точка не рухалася – Vx (0) = Vy (0) =
= Vz (0) = 0.
Миттєвеприскореннявизначимоякпершупохіднувідвекторамиттєвоїшвидкості:
r |
|
dVr |
d 2rr |
r |
r |
|
a |
= |
|
= |
|
= 6i |
+ 8 j. |
dt |
dt2 |
|||||
Вектор миттєвого прискорення ar = axir+ ay rj + az kr має координати
ax = dVdtx = 6; ay = dVdty = 8; az = dVdtz = 0.
Прискорення ar не залежить від часу, звідси робимо висновок, що рух – рівноприскорений. Оскільки рух відбувається зі стану спокою зпостійнимвекторомприскорення, тотраєкторіяповиннабутипрямою. Модульприскоренняобчислимозавідомоюформулою
a =  ax2 + a2y + az2 =
ax2 + a2y + az2 =  62 + 82 = 10 м/с2.
62 + 82 = 10 м/с2.
18 |
Розділ1. МЕХАНІКА |
|
|
Значення вектора миттєвої швидкості знайдемо за формулою
V =  Vx2 + Vy2 + Vz2 = 10t;
Vx2 + Vy2 + Vz2 = 10t;
V1 = 10t1 = 20 м/с.
Рухматеріальноїточкирівноприскоренийбезпочатковоїшвидкості. Шлях, пройдений за 10 с, визначається за формулою
|
at2 |
|
10 102 |
|
||
S2 = |
2 |
= |
|
|
= 500 м. |
|
2 |
2 |
|||||
|
|
|
||||
Модуль переміщення за перших 10 с знайдемо за формулою
∆r2 =  (∆x)2
(∆x)2
z
7

 Vr
Vr
 ar
ar



y у
x x
Рис. 1.7
+ (∆y)2 + (∆z)2 =  (3t2 )2 + (4t2 )2 = 500 м.
(3t2 )2 + (4t2 )2 = 500 м.
Рівність шляху S2 і модуля радіуса-вектора переміщення ∆r підтверджує те, щорозглянутий рух– прямолінійний(рис. 1.7).
Відповідь: швидкість V = 10t; прискорення a = 10 м/с2; модуль швидкості через 2 с від початкуруху20 м/с; шлях, пройденийпротягомперших10 с, якімодульпереміщення, складає500 м. Рухточкизістануспокоюрівноприскоренийпрямолінійнийуплощині, перпендикулярнійосіz.
Приклад 3. Колесо радіусом 0,2 м обертається навколо нерухомої осі так, що його кутова швидкість змінюється із часом за законом ω = 4 – 2t с–1. Знайти кутове прискорення колеса, а також лінійне прискорення точки на ободі в початковий момент часу. Скільки обертів зробить колесо до повної зупинки? Який шлях пройде точка на ободі за цей час?
R = 0,2 м
ω = 4 – 2t с−1 ω' = ω(t') = 0 ε – ? a(0) – ?
N' – ? S' – ?
Аналіз і розв'язок
Приобертаннінавколонерухомоїосікутовеприскоренняспрямованевздовжцієїосі, айоговеличина дорівнюєпохіднійвідмодулякутовоїшвидкості
ε = ddtω = − 2 с–2.
Приклади розв'язування задач |
19 |
|
|
Отже, колесо обертається з постійним кутовим прискоренням. Від'ємнезначенняговоритьпроте, щообертаннясповільненеівекторкутовогоприскореннянаправленийпротивекторакутовоїшвидкості
(рис. 1.8).
Точка на ободі при обертанні колеса рухається по колу, а її повне |
|||
лінійне прискорення |
ar складається з нормального |
|
|
r |
r |
ω |
|
an і тангенціального |
aτ. Нормальне прискорення |
|
|
|
|
r |
|
спрямоване до осі обертання і за модулем |
|
Vr |
|
an = ω2 R. |
r |
||
an |
|
||
Тангенціальнеприскоренняточкинаободіпри ar |
r |
|
|
сповільненомуобертанніспрямованеподотичнійдо |
aτ |
|
|
ободу протилежно руху і пов'язане з кутовим при- |
|
|
|
скоренням: |
aτ = εR. |
εr |
|
|
Рис. 1.8 |
|
|
Модульлінійногоприскореннявпочатковиймоментчасу a =  aτ2 + an2 = R
aτ2 + an2 = R ε2 + (ω(0))4 = 3,225 м/с2.
ε2 + (ω(0))4 = 3,225 м/с2.
ДлятогощобвизначитикількістьобертівколесаN' дозупинки, спочаткузнайдемомоментчасуt', коливонозупинилося, тобтоколикутова швидкістьсталадорівнюватинулю:
ω′ = 4 − 2t′ = 0,
звідки
t' = 2 с.
Кут, на який обернеться колесо за час від 0 до t':
t′ |
t′ |
ϕ′ = ∫ω dt = ∫(4 − 2t) dt = 4t′ − t′2 . |
|
0 |
0 |

20 |
Розділ1. МЕХАНІКА |
|
|
Число обертів, що зробить колесо:
N ′ = ϕ′ = 4t′ − t′2 = 0,64. 2π 2π
Шлях, який пройде точка на ободі колеса, теж пов'язаний з кутом повороту:
S′ = ϕ′R = (4t′ − t′2 )R = 0,8 м.
Відповідь: Колесо обертається рівносповільнено з кутовим прискоренням 2 с–2. Лінійне прискорення точки на ободі колеса в початковий моментчасускладало3,225 м/с2. Доповноїзупинкиколесозробило0,64 оберти, а точка на ободі пройшла шлях 0,8 м.