

Ushkac_Mehanika
.pdf1.2. Динамікаматеріальноїточки |
41 |
|
|
фізичні властивості не змінюються (не залежать від вибору положення початкукоординатінерціальноїсистемивідліку).
Закон руху центра мас
УмеханіціНьютоназавдякинезалежностімасивідшвидкостіімпульс системиможебутивираженийчерезшвидкістьїїпевноїточки– центра мас. Центр мас (або центр інерції) системи матеріальних точок – деяка уявна точка С, координати якої характеризують розподіл маси цієї системи. Положення центра мас (радіус-вектор цієї точки) визначається наступнимчином:
|
|
N |
|
rr |
|
∑mirri |
|
= |
i=1 |
, |
|
|
|||
C |
|
m |
|
|
|
|
де mi і rri – відповідно маса і радіус-вектор і-ї матеріальної точки; N –
N
число матеріальних точок у системі; m = ∑mi – маса всієї системи.
i=1
Імпульсусієїсистемибудеімпульсомцієїточки– центрамас, колиїї маса дорівнює масі системи:
pr = m drrC = mvC . dt
Центр мас системи рухається як матеріальна точка, в якій зосереджена маса всієї системи і на яку діє сила, що дорівнює геометричній сумі всіх зовнішніх сил, діючих на систему (закон руху центра мас):
N r
m ddtvC = ∑Fi .
i=1
Із закону збереження імпульсу виходить, що центр мас замкнутої системи або рухається прямолінійно і рівномірно, або залишається нерухомим.
42 |
Розділ1. МЕХАНІКА |
|
|
Сили в механіці
1.Силитяжіння(гравітаційнісили)
Усистемівідліку, пов'язанійізЗемлею, набудь-якетіломасоюm діє сила, яку називають силою тяжіння:
Fr = mgr,
Зацієюсилоювсітілападаютьзоднаковимприскореннямg = 9,81 м/с2,
що називається прискореннямr вільного падіння.
Вагою тіла P називається сила, з якою тіло внаслідок тяжіння до Землі діє на опору або натягує нитку підвісу. Сила тяжіння діє завжди, а вага виявляється лише тоді, коли на тіло крім сили тяжіння діють інші сили. Сила тяжіння дорівнює вазі тіла лишеr тоді, коли прискорення тіла
щодо Землі відсутнє. Інакше кажучи, P = m(gr − ar) , де ar – прискорення тіла разом з опорою відносно Землі. Якщо тіло вільно рухається в полі силитяжіння, то ar = gr івагадорівнюєнулю, тобтотілобуденевагомим.
Невагомість – це стан тіла, при якому воно рухається тільки під дією сили тяжіння.
2. Сили пружності виникають у результаті взаємодії тіл, що супроводжується їх деформацією.
Пружна сила пропорційна зміщенню частинки з положення рівновагиінаправленадоположеннярівноваги:
Fr = − krr,
де rr – радіус-вектор, що характеризує зміщення частинки з положення рівноваги; k – коефіцієнт пружності. Прикладом є сила пружної деформаціїпружиниприрозтягуванніабостисненні:
F = − kx,
де k – жорсткість пружини; x – пружна деформація.
3. Силатертяковзаннявиникаєприковзанніданоготілапоповерхні іншого:
Fтeр = µN,
деµ – коефіцієнттертяковзання, залежнийвідприродиістанудотичних поверхонь; N – силанормальноготиску, якапритискуєтертьовіповерхні одна до одної. Сила тертя направлена по дотичній до тертьових поверхоньубік, протилежнийрухуданоготілащодоіншого.
1.2. Динамікаматеріальноїточки |
43 |
|
|
Робота, енергія, потужність
Енергія – це універсальна міра різних форм руху і взаємодії. З кожноюформоюрухуматеріїпов'язуютьвідповіднуформуенергії: механічну, теплову, електромагнітну, ядерну.
Змінамеханічногорухуі, відповідно, механічноїенергіїтілавикликається силами, діючими на нього з боку інших тіл.
Робота сили – це кількісна характеристика процесу обміну енергією між взаємодіючими тілами. r
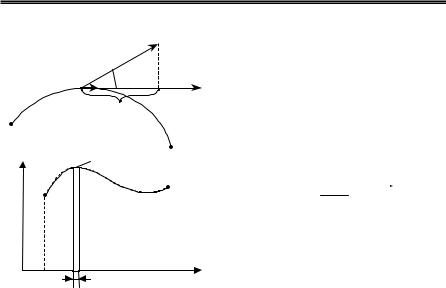
Припрямолінійномурусітілапіддієюпостійноїсили F, якаскладає деякийкутα знапрямомпереміщення, роботацієїсилидорівнює
A = Fs cos α = Fτ s,
де Fτ = F cos α – тангенціальна складова сили (проекція на напрямок руху). Якщокутα гострий(Fτ > 0), тангенціальнаскладовасилиприскорює рух тіла – збільшує його механічну енергію – здійснює позитивну роботу, і, навпаки, якщо a тупий (Fτ < 0), тангенціальна складова сили сповільнює рух тіла – робота сили негативна.
У загальному випадку сила може змінюватися як за модулем, так і за напрямом, а рух тіла може відрізнятися від прямолінійного, тому цією формулою користуватися не можна. Проте на елементарному (нескінченно малому) переміщенніr drr можна ввести скалярну величину –
елементарну роботу dA сили F:
dA = (Fr drr) = F cosα ds = FS ds.
У цьому випадку робота сили на ділянці траєкторії від точки 1 до точки 2 дорівнюватиме сумі елементарних робіт на окремих нескінченномалихділянкахшляху, тобтоінтегралу
A = ∫2 |
Frd rr = ∫2 |
F ds cos α = ∫2 |
Fτ ds. |
1 |
1 |
1 |
|
Якщо залежність Fτ від s представлена графічно, то робота А12 визначаєтьсяплощеюзаштрихованоїфігури(рис. 1.9).
Консервативною (потенціальною) називають силу, робота якої ви-
значається тільки початковим і кінцевим положеннями тіла та не зале-
44 |
|
|
|
Розділ1. МЕХАНІКА |
||
житьвідформитраєкторії. Консервативнимиєсилитяжінняi пружності, |
||||||
а також усі центральні сили. Неконсервативні – сили тертя. |
||||||
|
|
r |
Для того щоб охарактеризувати |
|||
|
|
F |
швидкістьздійсненняроботи, вводять |
|||
|
|
α |
||||
|
|
поняття потужності як роботи, що |
||||
|
drr |
r |
||||
1 |
υv |
виконуєсила, водиницючасу. Миттє- |
||||
|
Fτ |
ва потужність дорівнює скалярному |
||||
|
|
2 |
добуткувекторасилинавекторшвид- |
|||
Fτ |
dA |
|
кості, з якою рухається точка: |
|||
|
2 |
|
Frd rr |
|
||
|
1 |
dA |
r |
|||
|
|
A12 |
N = dt = |
dt |
= |
(F v). |
|
|
Одиниця роботи – джоуль (Дж): |
||||
|
|
|
||||
|
|
|
робота, здійсненасилою1Ннашляху |
|||
|
|
s |
1 м (1 Дж = 1 Н м). |
|
|
|
|
ds |
Одиниця потужності – ват (Вт): |
||||
|
|
потужність, приякійза1 сздійснюєть- |
||||
|
Рис. 1.9 |
ся робота 1 Дж (1 Вт =1 Дж/с). |
||||
Кінетична енергія
Кінетична енергія механічної системи (K) – це енергія механіч-
ногорухуцієїсистеми.
Сила, діючи на тіло, що покоїться, і викликаючи його рух, здійснює роботу, а кінетична енергія рухомого тіла зростає на величину витраченоїроботи. Такимчином, прирісткінетичноїенергіїчастинкинаелементарному переміщенні дорівнює елементарній роботі на тому ж переміщенні:
dK = dA.
Тіло масою m, що рухається зі швидкістю v, має кінетичну енергію
v |
v |
v |
dv |
v |
mv2 |
||
K = ∫dA = ∫Fτ ds = ∫m |
ds = ∫mvdv = |
||||||
|
|
. |
|||||
dt |
2 |
||||||
0 |
0 |
0 |
|
0 |
|
|
|
Кінетична енергія залежить тільки від маси і швидкості тіла, тому: єфункцієюстанусистеми; завждипозитивна;

1.2. Динамікаматеріальноїточки |
45 |
|
|
відрізняєтьсяврізнихсистемахвідліку.
Кінетична енергія, як і робота, виражається в джоулях (Дж).
Потенціальна енергія
Для зручного знаходження роботи консервативних сил при різних переміщеннях тіла використовують поняття потенціальної енергії. Завдяки тому, що робота консервативної сили залежить тільки від початкового й кінцевого положень тіла, її можна знаходити як різницю значень
певноїпросторовоїфункції W (rr) упочатковійікінцевійточкахположен-
нятіла:
A12 = W (rr1 ) − W (rr2 ) = −∆W .
Цяфункція, якіробота, виражаєтьсявджоулях(Дж) таназивається потенціальноюенергієютілавполідіїданоїконсервативноїсили.
Потенціальнаенергіятілаякпросторовафункціявідрізняєтьсяврізних його положеннях. Для її знаходження треба виділити певне положення тіла(точку простору rr1 ), вякому потенціальна енергія вважається нульо-
вою (нульовий рівень потенціальної енергії W (rr1) = 0 ). У будь-якому іншомуположенні(точці rr2) W (rr) = W (rr2 ) − W (rr1 ) = ∆W = − A12 = A21, тоб-
то потенціальна енергія дорівнює роботі, яку здійснить дана консервативна сила при переміщенні тіла із цього стану на нульовий рівень, або роботі проти сили при переміщенні тіла з нульового рівня в цей стан.
При переміщенні d rr у сусідню точку консервативна сила здійснює роботу– потенціальна енергія тілазмінюється:
|
∂W |
dx + |
∂W |
dy + |
∂W |
|
dA = − dW = − |
|
|
|
dz . |
||
|
∂x |
|
∂y |
|
∂z |
|
|
|
|
|
Зіншогобокуроботасили
dA = Frd rr = Fxdx + Fy dy + Fz dz.
Отже, складовівекторасилизв'язаніізчастиннимипохідними(дод. Е) потенціальноїенергії:
Fx = − ∂∂Wx ; Fy = − ∂∂Wy ; Fz = − ∂∂Wz .

46 |
Розділ1. МЕХАНІКА |
|
|
У векторному вигляді цей зв'язок записують з використанням поняття градієнта (дод. З):
Fr = −grad(W ).
Сила, щодієнатіловбудь-якійточці, завждиспрямованавбікзменшенняпотенціальноїенергіїтіла.
Прикладамипотенціальноїенергіїє:
потенціальнаенергіятіламасоюm нависотіh наднульовимрівнем:
W = mgh;
потенціальнаенергіяпружини, розтягнутоїнадовжинух: W = kx2 .
2
Закон збереження енергії
Повна механічна енергія системи – енергія механічного руху і взаємодії– дорівнюєсумікінетичноїтапотенціальноїенергій:
Е= K + W.
Усистемі тіл, між якими діють тільки консервативні сили, повна механічна енергія зберігається, тобто не змінюється із часом
(закон збереження механічної енергії):
K + W = E = const.
Це– фундаментальнийзаконприроди. Вінєнаслідкомоднорідності часу– інваріантностіфізичнихзаконівщодовиборупочаткувідлікучасу.
Механічні системи, на тіла яких діють тільки консервативні сили (внутрішні й зовнішні), називаються консервативними. У цих системах повнамеханічнаенергіязалишаєтьсяпостійною. Можутьлишевідбуватися перетворення кінетичної енергії в потенціальну і навпаки в еквівалентнихкількостяхтак, щоповнаенергіязалишаєтьсянезмінною.
Дисипативні системи – системи, в яких механічна енергія змінюєтьсязарахунокперетвореннявінші(немеханічні) формиенергії. Повна механічнаенергіяцихсистемнезберігається, томущовнихдіютьнеконсервативнісили, наприклад, силитертя(механічнаенергіяперетворюєтьсянатеплоту), силирізнихдвигунівабоживихістот(різніформиенергії перетворюютьсянамеханічну). Протепри"зникненні" механічноїенергії завждивиникаєеквівалентнакількістьенергіїіншоговидуінавпаки. Таким чином, енергія ніколи на зникає і не з'являється знову, вона лише

1.2. Динамікаматеріальноїточки |
47 |
|
|
перетворюється з однієї форми в іншу. У цьому полягає фізична суть законузбереженняіперетворенняенергії– сутьнезнищуваностіматерії таїїруху.
Зіткнення
Удар(зіткнення) – зіткненнядвохабобільшетіл, приякомувзаємодія триває дуже короткий час.
Центральний удар – удар, при якому тіла до удару рухаються по прямій, що проходить через їх центри мас.
Абсолютно пружний удар – зіткнення двох тіл, у результаті якого вобохвзаємодіючихтілахнезалишаєтьсяніякихдеформаційівсякінетичнаенергія, яку малитіладоудару, післяударузновуперетворюється накінетичну. Прицьомувиконуютьсязаконизбереженняімпульсуімеханічноїенергії.
Позначимо швидкості двох пружних куль масами m1 і m2 до удару через v1 та v2, після удару – через v1′ і v′2 . Розглянемо прямий центральний удар. Закони збереження мають вигляд
|
|
|
m v + m |
v |
2 |
= m v′ |
+ m |
v′ ; |
||||||||
|
1 1 |
2 |
|
|
1 1 |
|
|
2 |
2 |
|
|
|||||
|
|
|
m v2 |
m v2 |
|
m v′2 |
|
|
m v′2 |
|||||||
|
|
|
1 1 |
+ |
2 2 |
|
|
= |
1 1 |
|
+ |
|
2 2 |
. |
|
|
|
2 |
|
|
|
2 |
|
|
2 |
||||||||
Звідси |
|
2 |
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
v′ |
= |
(m1 − m2 )v1 + 2m2v2 |
; |
v′ = |
(m2 − m1)v2 + 2m1v1 |
. |
||||||||||
|
|
|||||||||||||||
1 |
|
m1 + m2 |
|
|
|
|
|
2 |
|
|
|
m1 + m2 |
||||
|
|
|
|
|
|
|
|
|
|
|
||||||
Абсолютно непружний удар – зіткнення двох тіл, у результаті якого тіла деформуються та об'єднуються, рухаючись далі як єдине тіло:
m v |
+ m |
v2 |
= (m + m |
) v; v = |
m1v1 + m2 v2 |
. |
||
|
||||||||
1 |
1 |
2 |
|
1 |
2 |
|
m1 + m2 |
|
|
|
|
|
|
|
|
||
При m1 = m2 v = v1 + v2 .
2
Принепружномуударіневиконуєтьсязаконзбереженнямеханічної
48 Розділ1. МЕХАНІКА
енергії – внаслідок деформації частина кінетичної енергії переходить увнутрішнюенергіютіл. Цезменшеннякінетичноїенергіїдорівнює
m v2 |
|
m v2 |
|
|
(m + m )v2 |
|
m m |
|
|
||
∆K = |
1 1 |
+ |
2 2 |
|
− |
1 2 |
= |
1 2 |
(v − v |
)2. |
|
2 |
2 |
2 |
2(m + m ) |
||||||||
|
|
|
|
|
1 2 |
|
|||||
|
|
|
|
|
|
|
|
1 2 |
|
|
|
Якщо тіло, що ударяється, було спочатку нерухоме (v2 = 0), то
|
m v |
|
|
m |
|
|
m v2 |
|||
v = |
|
1 1 |
|
; ∆K = |
2 |
|
|
1 1 |
. |
|
m |
+ m |
2 |
m + m |
2 |
2 |
|||||
|
|
|
||||||||
|
1 |
|
|
1 |
|
|
|
|||
Якщо m2 >> m1, то v << v1 і ∆K ≈ K1.
Поле сил тяжіння
Між будь-якими двома матеріальними точками діє сила взаємного тяжіння, прямо пропорційна добутку мас цих точок і обернено пропорційна квадрату відстані між ними (закон всесвітнього тя-
жіння):
F = G mr1m2 2 ,
де G = 6,67 10–11 – гравітаційна стала, Н м2 кг–2.
Ця сила називається гравітаційною, або силою всесвітнього тяжіння. Гравітаційнісилитяжіннязавждиєсиламипритягуванняінаправлені вздовж прямої, що проходить через взаємодіючі тіла. Гравітаційна взаємодіяміжтіламиздійснюєтьсязадопомогоюполятяжіння, абогравітаційного поля. На прикладі нього розглянемо поняття напруженості та потенціалуполя.
Напруженість поля тяжіння в деякій точці – це фізична величина, щодорівнюєсилі, діючоїзбокуполянатілоодиничноїмасивційточці. Напруженістьєвекторноюсиловоюхарактеристикоюполятяжіння:
|
|
r |
= |
Fr |
|
|
|
|
|
E |
|
. |
|
|
|
|
|
m |
|
|
|||
|
|
|
|
|
|
|
|
УгравітаційномуполіЗемлі Fr = mgr, звідки |
|
||||||
E = g = |
F |
= GM |
= |
GM |
, |
||
|
(RЗ + h)2 |
||||||
|
m |
|
R2 |
|
|
||

1.2. Динамікаматеріальноїточки |
49 |
|
|
деRЗ – радіусЗемлі, масаякоїМ; h – відстаньвідцентратяжіннятіладо поверхніЗемлі.
Припереміщеннітіламасоюm навідстаньdR полетяжінняздійснює роботу dA = − G mMR2 dR (знакмінустому, щосилаіпереміщенняпроти-
лежнонаправлені). Припереміщенні тілазвідстані R1 довідстаніR2
|
R2 |
|
mM |
|
GM |
|
GM |
|
|
|
∫ |
|
|
||||||
|
|
|
|
|
|||||
A = − |
G |
R |
2 |
dR = −m |
R2 |
− |
R1 |
. |
|
|
|
|
|
|
|
||||
|
R1 |
|
|
|
|
|
|
|
|
Роботанезалежитьвідтраєкторіїпереміщення, авизначаєтьсятільки початковимікінцевимположеннямитіла.
Отже, силитяжінняконсервативні, аполетяжінняєпотенціальним. Роботаконсервативнихсилдорівнюєзмініпотенціальноїенергіїсистеми зізворотнимзнакомA = – (W2 – W1). Взявшинульовийрівеньпотенціальноїенергіїнанескінченнійвідстані, отримаємопотенціальнуенергіютіла масою m на відстані R від тіла масою M:
W = − G mMR .
Длябудь-якогопотенціальногополяможнавизначитискалярнуенер- гетичнухарактеристикуполя– потенціал.
Потенціалом поля тяжіння в даній точці поля називається скалярнавеличина, щодорівнюєпотенціальнійенергіїтілаодиничноїмаси вційточці:
ϕ(R) = Wm = − G MR .
Розглянемозв'язокміжпотенціаломполятяжінняійогонапруженістю:
dA = – mdϕ; dA = Fdr = mg dr;
g = − ddrϕ , або gr = − gradϕ = − ϕ.

50 |
Розділ1. МЕХАНІКА |
|
|
У загальному випадку для будь-якого потенціального поля між напруженістюіпотенціаломіснуєзв'язок
Er = −gradϕ = − ϕ.
Цяформулаєнаслідкомспіввідношення Fr = −gradW .
Космічні швидкості
Першою космічною швидкістю називають таку мінімальну швидкість, яку треба надати тілу, щоб воно могло рухатися навколо Землі по круговійорбіті, тобтоперетворитисянаштучнийсупутникЗемлі:
GmM |
|
v2 |
|
|
|
= man = m |
1 |
(2-й закон Ньютона); |
|
R2 |
R |
|||
|
|
g = P = GM ; m R2
v1 =  gR = 7,9 км/с,
gR = 7,9 км/с,
де R – радіус Землі.
Другою космічною швидкістю називається найменша швидкість, яку треба надати тілу, щоб воно могло подолати тяжіння Землі та перетворитися на супутник Сонця. У цьому випадку кінетична енергія тіла повиннадорівнюватироботі, щоздійснюєтьсяпротисилтяжіння:
mv2 |
∞ |
mM |
|
GmM |
|
= ∫G |
|
|
|||
2 |
|
dr = |
|
; |
|
2 |
r2 |
R |
|||
|
R |
|
|
|
|
v2 =  2gR = 11,2 км/с.
2gR = 11,2 км/с.
Третьою космічною швидкістю називають швидкість, яку необ-
хідно надати тілу на Землі, щоб воно покинуло межі Сонячної системи, подолавшитяжінняСонця: v3 = 16,7 км/с.