

Тема 3 плоско-параллельное движение тела
3.1 Способ изучения движения
|
Плоско-параллельным называют такое движение тела, при котором каждая его точка движется в плоскости, параллельной некоторой неподвижной плоскости. |
|
Примеры.
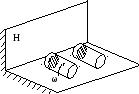
1. Все точки любого круглого сечения катящегося цилиндра остаются в плоскостях, параллельных неподвижной плоскости Н (рис. 3.1) |
Рисунок 3.1 |
2. Все звенья кривошипно-шатунного механизма (рис. 3.2) движутся, оставаясь в одной плоскости. Какие движения выполняют кривошип ОА и ползун В, мы знаем?... ОА вращается вокруг оси О, ползун В движется поступательно. Шатун АВ совершает …? плоское движение.

Рисунок 3.2
|
Пусть имеем тело (рис. 3.3), которое совершает такое движение, при котором его любое сечение S остается в плоскости П, параллельной некоторой неподвижной плоскости Н. Если мы знаем траекторию точки А в плоскости П, вопрос: какие точки тела движутся так же, как и точка А? Ответ. Все точки, находящиеся на перпендикуляре к плоскости Н (А, А1, А2,…).
|
Рисунок 3.3 |

Отсюда вывод: нет необходимости изучать движение всего тела! Достаточно изучить движение сечения S в своей плоскости П.
 В
дальнейшем будем изображать плоскость
П
и сечение S
в произвольный момент времени (рис.
3.4).
В
дальнейшем будем изображать плоскость
П
и сечение S
в произвольный момент времени (рис.
3.4).
3.2 Уравнения движения тела
Плоско-параллельное движение будем называть плоским, т.к. по движению сечения S в плоскости Оxy будем судить о плоско-параллельном движении всего тела.
Покажем, что плоское движение есть синтез двух движений. Для этого покажем сечение S в двух положениях: I и II (рис. 3.4).
Положение II можно получить таким образом:
– переместить фигуру S сначала поступательно, оставив прямую АВ параллельно своему положению I, т.е. точка А попадет в точку АII, а точка В в точку В';
– затем повернуть сечение S вокруг оси АII z на угол α1. В этом случае точку A называют полюсом.
Есть другой вариант:
– переместить фигуру S поступательно вместе с точкой В, при этом точка В попадет в точку ВII, а точка А – в точку А';
– затем повернуть сечение S вокруг оси ВII z на угол α2. В этом случае точка В является полюсом.
Нетрудно убедиться в том, что углы α1 и α2 одинаковы по величине и направлению. Траектории точек А и В при этом разные, т.е. поступательная часть движения зависит от выбора полюса.
Вывод. Всякое перемещение плоской фигуры в своей плоскости (а, следовательно, и всякое плоско-параллельное перемещение твердого тела) можно себе представить как совокупность двух перемещений:
1) поступательного перемещения, зависящего от выбора полюса, и
2) вращательного перемещения вокруг оси, проходящей через полюс, перпендикулярно плоскости движения; угол и направление поворота от выбора полюса не зависят.
Как задать уравнения плоского движения тела?
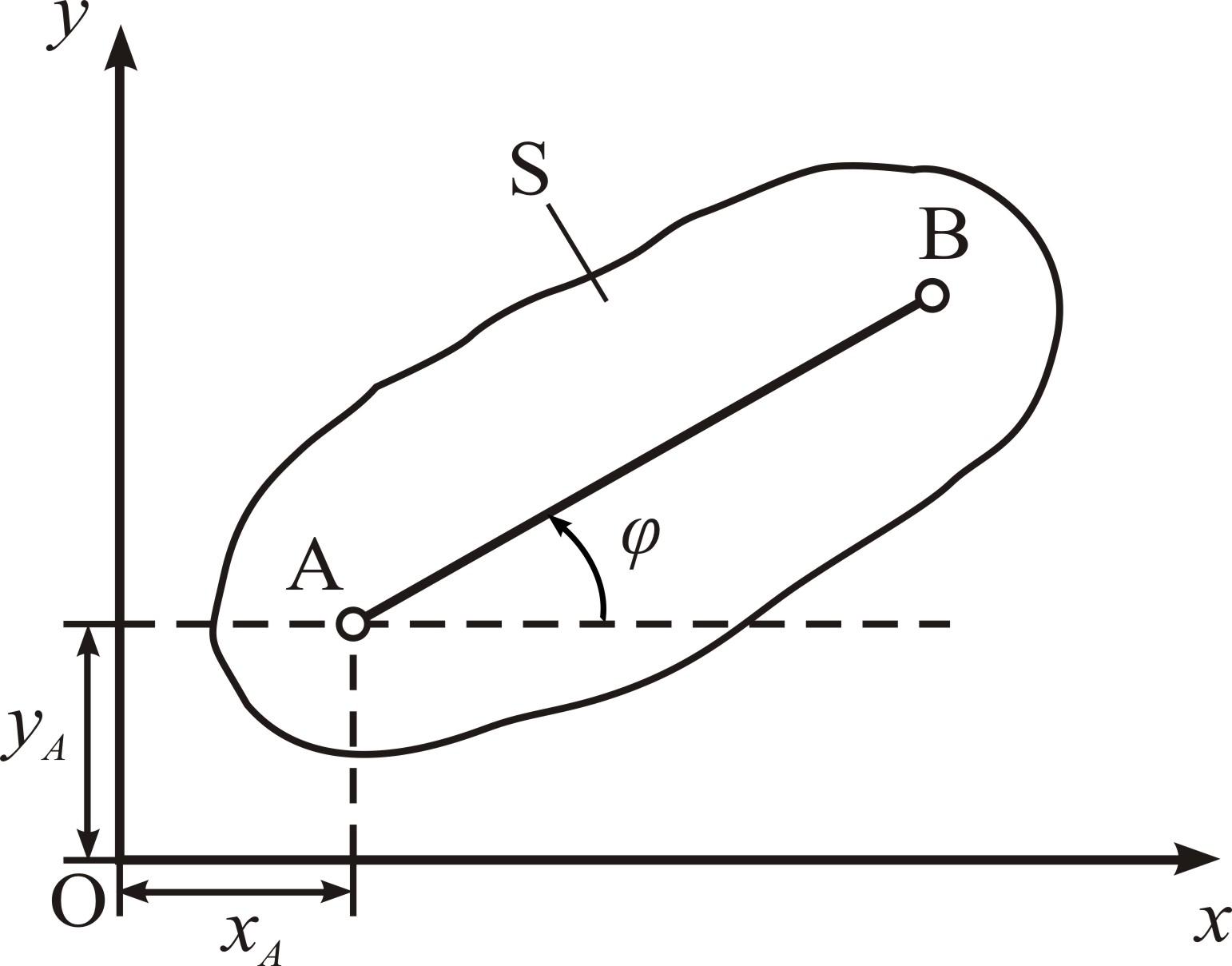
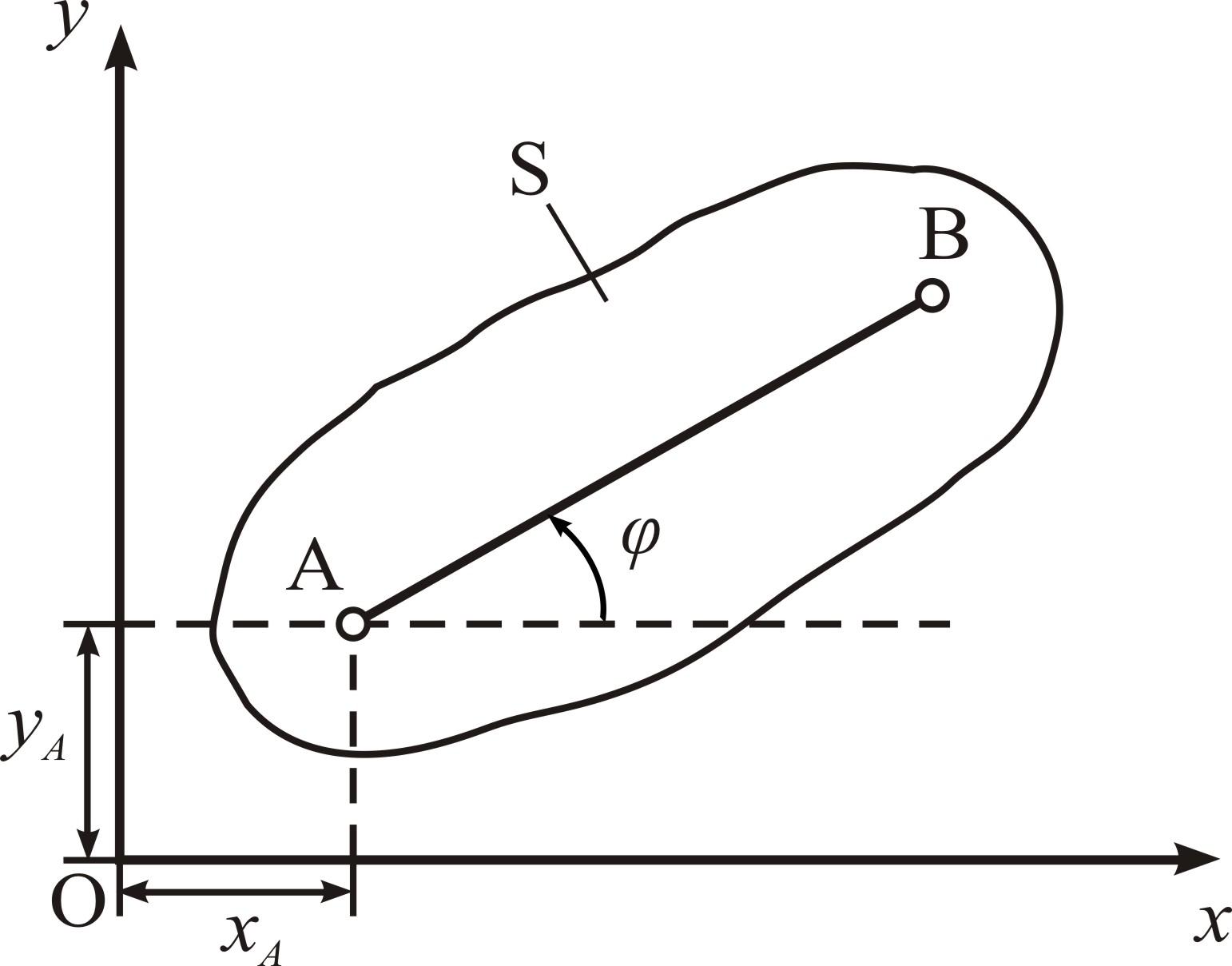
Положение плоской фигуры S в любой момент времени определяется положением отрезка АВ. Для этого надо задать положение, например, точки А, т. е. координаты (хА; уА) (рис. 3.5).
|
Рисунок 3.5
|
Положение точки В определяется также двумя координатами, но поскольку расстояние между точками А и В остается неизменным, вместо четырех координат (хА; уА; хВ; уВ) нужны только три независимые параметра. Третьим параметром может быть угол φ. φ – угол поворота отрезка АВ вокруг оси Аz. Таким образом, уравнения (3.1) являются кинематическими уравнениями движения плоской фигуры.
|
 .
(3.1)
.
(3.1)Рассмотрим частные случаи:
1. Пусть плоская фигура движется так, что
 . (3.2)
. (3.2)
В этом случае отрезок АВ будет параллельным своему первоначальному положению, т.е. плоская фигура совершает поступательное движение.
2. Пусть плоская фигура движется так, что
 . (3.3)
. (3.3)
В этом случае плоская фигура вращается вокруг оси, проходящей через точку А и перпендикулярной к плоскости Оху, т. е. Аz.
Вспомним основную задачу раздела «Кинематика» (рис. 2.2): по данным уравнениям движения (в данном случае это уравнения 3.1) надо, во-первых, определить скорость и ускорение тела, а затем скорости и ускорения точек этого тела.
Перейдем к решению первой части задачи.