

11. Характеристики пропорционального и интегрирующего звеньев. Пропорциональное звено
В пропорциональном или безынерционном звене выходной сигнал прямо пропорционален входному сигналу: y(t) = k x(t), откуда передаточная функция пропорционального звена: W(p) = k
есть величина постоянная, не зависящая от р. На рис.4.3 приведены примеры пропорциональных (безынерционных) звеньев.
(а)
(б)

(в)

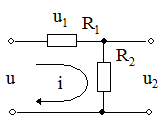
Рис. 4.3 Безынерционные звенья: резистивный делитель (а), инвертирующий усилитель (б), неинвертирующий усилитель (в)
Для схемы на рис. 4.3.а имеем:
![]()
u = u1+
u2 = i
R1 + i
R2 = i
(R1+R2),
откуда ![]()
![]()
тогда передаточная функция
![]() =
=![]() .
.
Для схемы на рис. 4.3.б в соответствии с
(4.5) получим:
![]() .
.
В частном случае при
![]() получается инвертор, у которого W(p) = -1.
получается инвертор, у которого W(p) = -1.
Для схемы на рис. 4.3.в в соответствии с
(4.6) имеем:
![]() .
.
Т.к. число
![]() ,
то усилитель на рис.4.3.б называется
неинвертирующим.
,
то усилитель на рис.4.3.б называется
неинвертирующим.
Интегратор
В интеграторе выходной сигнал связан
с входным соотношением:
![]() ,
,
откуда
![]() где
где![]() ,
,![]() - постоянная времени интегратора.
- постоянная времени интегратора.
Передаточная функция интегратора:
![]() .
.
Если в схеме на рис.4.2.б вместо
![]() включить конденсатор С, а вместо Z
включить резистор R (рис. 4.4а) , то в
соответствии с (4.5) с учетом (4.4) получим
интегратор с инвертированием, у которого
включить конденсатор С, а вместо Z
включить резистор R (рис. 4.4а) , то в
соответствии с (4.5) с учетом (4.4) получим
интегратор с инвертированием, у которого![]() , где
, где![]() ,
,![]() = СR - постоянная времени интегратора.
= СR - постоянная времени интегратора.
Если перед интегратором включить
инвертор, то получится интегратор без
инвертирования, у которого
![]() .
.
(а)

(б)

Рис. 4.4 Схемы интегратора (а) и дифференциатора (б)
Основные характеристики интегратора:
ККП
![]() ;
;![]() ;
;![]() ;
;
АЧХ
![]() ;
;
ЛАЧХ
![]() ;
;
ФЧХ
![]() ;
;
ПХ
![]() ;
;
ИХ
![]() =
=![]() .
.
На рис. 4.5 приведены ЛАЧХ, ЛФЧХ, ПХ и ИХ интегратора.



Рис. 4.5. Графики ЛАЧХ, ЛФЧХ, ПХ и ИХ интегратора
12. Характеристики дифференциатора и инерционного звена первого порядка
На рис. 4.2 приведены две схемы включения операционных усилителей: инвертирующего (а) и неинвертирующего (б).
(а)

(б)

Рис. 4.2 Схемы включения операционных усилителей: инвертирующего (а) и неинвертирующего (б)
Для схемы на рис. 4.2.а передаточная
функция определяется по формуле:
![]() ,
(4.5) а для схемы на рис. 4.2.б - по формуле:
,
(4.5) а для схемы на рис. 4.2.б - по формуле:![]() . (4.6)
. (4.6)
Дифференциатор
В дифференциаторе выходной сигнал
связан с входным соотношением:
![]() ,
,
откуда
![]() ,
где
,
где![]() ,
,![]() - постоянная времени дифференциатора.
- постоянная времени дифференциатора.
Передаточная функция дифференциатора
![]() .
.
Если в схеме на рис. 4.2б вместо
![]() включить резистор R, а вместо Z включить
конденсатор С (рис. 4.4б), то в соответствии
с (4.5) с учетом (4.4) получим дифференциатор
с инвертированием
включить резистор R, а вместо Z включить
конденсатор С (рис. 4.4б), то в соответствии
с (4.5) с учетом (4.4) получим дифференциатор
с инвертированием
![]() ,
где
,
где![]() - постоянная времени дифференциатора.
При необходимости инверсию можно
устранить, включив последовательно с
дифференциатором инвертор, у которого
W(p) = -1. Тогда получим
- постоянная времени дифференциатора.
При необходимости инверсию можно
устранить, включив последовательно с
дифференциатором инвертор, у которого
W(p) = -1. Тогда получим![]() .
.
Основные характеристики дифференциатора:
ККП
![]() ,
,![]() ,
,![]() .
.
АЧХ
![]() .
.
ЛАЧХ
![]() .
.
ФЧХ
![]() .
.
ПХ
![]() .
.
ИХ
![]() .
.
На рис. 4.6 приведены ЛАЧХ, ЛФЧХ, ПХ и ИХ дифференциатора.
(а)

(б)

Рис. 4.6. Графики ЛАЧХ, ЛФЧХ, ПХ и ИХ дифференциатора
Инерционное звено
В инерционном или апериодическом звене выходной сигнал связан с входным соотношением
![]() ,
откуда Y(p) = k X(p) - p T Y(p) , (4.7) где Т - постоянная
времени звена.
,
откуда Y(p) = k X(p) - p T Y(p) , (4.7) где Т - постоянная
времени звена.
Передаточная функция инерционного
звена следует из (4.7)
![]() . (4.8)
. (4.8)
Если в схеме на рис. 4.2.а вместо
![]() конденсатор С, а вместо
конденсатор С, а вместо![]() включить резистор R (рис. 4.7.а), то в
соответствии с приведенными на рис.
4.7.а обозначениями получим
включить резистор R (рис. 4.7.а), то в
соответствии с приведенными на рис.
4.7.а обозначениями получим
(а)

(б)

Рис. 4.7. Схемы инерционного звена (а) и дифференцирующей цепи (б)
![]() ,
,![]() ,
,![]() .
.
Тогда
![]() .
.
По определению W(p) =
 .
.
После сокращения числителя и знаменателя
на рС получим W(p) =
![]() , где Т = RC - постоянная времени.
, где Т = RC - постоянная времени.
Основные характеристики инерционного звена с передаточной функцией (4.8):
ККП
![]() ;
;![]() ;
;![]() ;
;
АЧХ
![]() ;
;
ЛАЧХ
![]() =
=![]() ;
;
ФЧХ
![]() ;
;
ПХ
![]() =
=![]() ;
;
ИХ
![]() .
.
На рис. 4.8 приведены годограф ККП, ЛАЧХ, ЛФЧХ, ПХ и ИХ инерционного звена, а также кусочно-линейная аппроксимация ЛАЧХ.
Частота
![]() называется частотой сопряжения отрезков
прямых. До частоты
называется частотой сопряжения отрезков
прямых. До частоты![]() ЛАЧХ идет параллельно оси абсцисс,
а выше частоты
ЛАЧХ идет параллельно оси абсцисс,
а выше частоты![]() ЛАЧХ имеет наклон -20 дБ/дек. На частоте
ЛАЧХ имеет наклон -20 дБ/дек. На частоте![]() ФЧХ имеет значение
ФЧХ имеет значение![]() .
.




Рис. 4.8 Графики годографа ККП, ЛАЧХ, ЛФЧХ, ПХ и ИХ инерционного звена