

2. Разновидности схем автоматического управления.
Разомкнутое управление
Наиболее простым является разомкнутое управление. Структурная схема такого управления приведена на рис. 1.1, где УУ - устройство управления, ОУ - объект управления, х - входной сигнал, который может и отсутствовать, т.е. х=0 /4,5/.

Рис.1.1 Структурная схема разомкнутого управления
При разомкнутом управлении воздействие u с выхода УУ не зависит от сигнала y на выходе объекта управления и от случайного внешнего возмущения z. Это приводит к снижению качества управления.
Разомкнутое управление с компенсацией возмущения
Указанный выше недостаток частично устраняется при разомкнутом управлении с компенсацией возмущения. Структурная схема такого управления приведена на рис.1.2.

Рис. 1.2. Структурная схема разомкнутого управления
с компенсацией возмущения
В этой схеме дополнительно введены
сумматор и датчик Д, преобразующий
возмущение z в сигнал
![]() .В результате воздействующий на ОУ сигнал
.В результате воздействующий на ОУ сигнал![]() зависит от возмущения z и при определенных
условиях может скомпенсировать его
воздействие на ОУ.
зависит от возмущения z и при определенных
условиях может скомпенсировать его
воздействие на ОУ.
Замкнутое управление
Качественного управления можно достичь и без измерения возмущения z. Для этого используется обратная связь, по которой сигнал у с выхода ОУ поступает на УУ и вносит коррективы в сигнал управления u.
Структурная схема управления с обратной связью приведена на рис.1.3. Такое управление называется замкнутым.

Рис. 1.3 Структурная схема управления с обратной связью
Замкнутое управление с компенсацией возмущения
Более высокое качество управления достигается при замкнутом управлении с компенсацией возмущения. Структурная схема такого управления приведена на рис. 1.4.
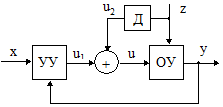
Рис. 1.4 Структурная схема замкнутого управления с компенсацией возмущения
Эта схема является суперпозицией схем на рис.1.2 и 1.3.
Стабилизация
Стабилизация - это такое управление, при котором обеспечивается постоянство сигнала у на выходе ОУ при изменении условий его работы и наличии случайных возмущений z. Входной сигнал х в этом случае является эталоном, т.е. х=соnst.
Программное управление
При программном управлении обеспечивается заданное во времени или в пространстве изменение сигнала у на выходе ОУ. Программное управление реализуется по схемам, приведенным на рис.1.1, 1.2, 1.3, 1.4.
Требуемый закон изменения сигнала у хранится в запоминающем устройстве.
3. 6 алгоритмов управления.
Следящее управление
При следящем управлении закон изменения сигнала х заранее неизвестен. В следящих системах сигнал у должен с определенной степенью точности отслеживать случайные изменения входного сигнала х. Примером следящей системы является система автоматического наведения зеркала антенны радиостанции на летящий самолет или искусственный спутник Земли. Следящее управление реализуется по схемам на рис. 1.3 и 1.4.
Экстремальное управление
Управление с поиском экстремума или экстремальное управление применяется тогда, когда необходимо поддерживать максимальное или минимальное значение выходного сигнала у при изменении входного сигнала х и случайного воздействия z. Структурная схема экстремального управления объектом приведена на рис.1.5, где УПЭ - устройство поиска экстремума.

Рис. 1.5. Структурная схема экстремального управления
На рис.1.6 приведены графики зависимостей y = f(u) при х=const для ОУ экстремальных систем с поиском максимума (а) и минимума (б).


Рис. 1.6 Графики зависимостей y=f(u) для ОУ экстремальных систем
с поиском максимума (а) и минимума (б)
В точке максимума функции y=f(u) выполняются
условия:
![]() ,
,![]() ,
а в точке минимума:
,
а в точке минимума:![]() ,
,![]() .
.
Основной проблемой поиска экстремума
является неопределенность направления
изменения управляющего сигнала u в
начальный момент поиска. Действительно,
по одному значению сигналов
![]() и
и![]() нельзя определить направление изменения
сигнала u. Для этого надо сделать небольшое
приращение сигнала u в любую сторону от
первоначального значения
нельзя определить направление изменения
сигнала u. Для этого надо сделать небольшое
приращение сигнала u в любую сторону от
первоначального значения![]() и определить знак производной
и определить знак производной![]() Знак производной определяется в УПЭ.
Если в системе с поиском максимума (рис.
1.6.а) величина
Знак производной определяется в УПЭ.
Если в системе с поиском максимума (рис.
1.6.а) величина![]() ,
то направление изменения сигнала u
выбрано верно. В противном случае при
,
то направление изменения сигнала u
выбрано верно. В противном случае при![]() направление изменения сигнала u надо
поменять на противоположное.
направление изменения сигнала u надо
поменять на противоположное.
В системе с поиском минимума (рис. 1.6.б)
все наоборот: при
![]() направление изменения сигнала u
правильное, а при
направление изменения сигнала u
правильное, а при![]() ошибочное, т.е. система удаляется от
минимума сигнала уминна выходе
ОУ.
ошибочное, т.е. система удаляется от
минимума сигнала уминна выходе
ОУ.
Примером экстремальной системы является автоматически настраивающийся на частоты телевизионных станций телевизор. Здесь входными являются сигналы на разных частотах от различных ТВ-передатчиков, сигнал управления изменяет параметры резонансных контуров ТВ-приемника, а выходным является сигнал видеоизображения.