

21. Получение передаточных функций сложных сау.
На практике встречаются системы с двумя и более цепями обратной связи. Такие системы называются многоконтурными. На рис. 5.4 приведена схема двухконтурной системы.

Рис. 5.4 Схема двухконтурной системы
Передаточную функцию для этой системы
получим поэтапно. Вначале получим
выражение для передаточной функции
внутреннего контура ВК, обведенного
пунктиром. Схема ВК совпадает со схемой
на рис. 5.3.б, для которой на основании
![]() получим:
получим:![]() .
.
Теперь схема совпадает с рис. 5.3.а, в
котором
![]() .
.
Отсюда на основании
![]() получим
получим![]() ,
где
,
где![]() определяется по приведенному выше
выражению.
определяется по приведенному выше
выражению.
На рис. 5.5.а приведена схема трехконтурной системы, причем сигналы в цепи обратной связи берутся из разных точек схемы.
(а)

(б)
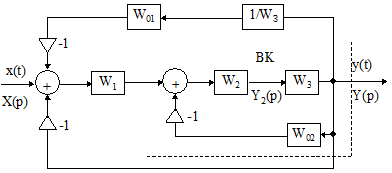
Рис. 5.5 Две эквивалентные схемы трехконтурной системы
На рис. 5.5.б приведена эквивалентная ей
вторая схема, в которой сигнал обратной
связи берется из общей для всех трех
цепей точки. Это удалось сделать благодаря
тому, что дополнительно включили звено
с передаточной функцией
![]() .
Покажем это. В схеме на рис. 5.5.а изображение
сигнала на входе звена
.
Покажем это. В схеме на рис. 5.5.а изображение
сигнала на входе звена![]() равно
равно![]() .
Тогда
.
Тогда![]() .
Помножим Y(p) на
.
Помножим Y(p) на![]() и получим
и получим![]() ,
то есть на звено
,
то есть на звено![]() поступает тот же самый сигнал, что и в
схеме на рис. 5.5.а. Таким образом,
эквивалентность схем на рис. 5.5.а и на
рис. 5.5.б доказана.
поступает тот же самый сигнал, что и в
схеме на рис. 5.5.а. Таким образом,
эквивалентность схем на рис. 5.5.а и на
рис. 5.5.б доказана.
Теперь поэтапно получим выражение для
передаточной функции системы на рис.
5.5.б. Передаточная функция внутреннего
контура на основании
![]() с учетом
с учетом![]() равна
равна![]() =
=![]() .
.
Так как две цепи обратных связей имеют
общий входной сигнал y(t) и вводятся в
одну точку на входе, следовательно они
образуют звено передачи, соединенное
по параллельной схеме. Передаточная
функция этого звена с учетом
![]() и
и![]() равна
равна![]() . Тогда на основании (5.6) получим выражение
для передаточной функции системы на
рис. 5.5.б:
. Тогда на основании (5.6) получим выражение
для передаточной функции системы на
рис. 5.5.б:
![]() =
= , где
, где![]() определяется по приведенному выше
выражению.
определяется по приведенному выше
выражению.
Используя приведенные формулы
![]() ,
,![]() ,
,![]() и
и![]() ,
а также описанные приемы и преобразования,
можно получить выражения для передаточных
функций систем со сложной конфигурацией
схемы и со многими цепями обратных
связей.
,
а также описанные приемы и преобразования,
можно получить выражения для передаточных
функций систем со сложной конфигурацией
схемы и со многими цепями обратных
связей.
22. Признак и условие устойчивости замкнутых сау.
Признаком устойчивости системы является
следующее: если после воздействия на
систему короткого импульса она с течением
времени приходит в состояние покоя, то
данная система устойчива. Математически
это записывается так:
![]() .
.
Системы без обратных связей всегда
устойчивы, в этих системах коэффициенты
в (5.12)
![]() .
.
Системы с обратными связями не всегда устойчивы. В неустойчивых системах возникают незатухающие колебания, которые нарушают нормальную работу систем и могут даже разрушить их.
Как уже отмечалось в разделе 2, САУ с
передаточной функцией вида
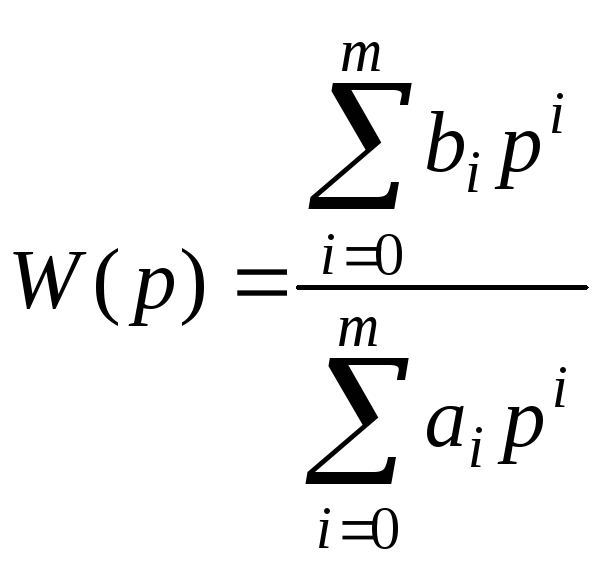 описывается дифференциальным уравнением
описывается дифференциальным уравнением![]() ,
(5.12) где
,
(5.12) где![]() символ дифференцирования.
символ дифференцирования.
После прекращения входного воздействия
правая часть уравнения (5.12) равна нулю,
и оно превращается в однородное
дифференциальное уравнение
![]() .
.
Решение этого уравнения имеет следующий
вид:
![]() ,
(5.13)
,
(5.13)
где
![]() - коэффициенты,
- коэффициенты,![]() - полюсы . Полюсы - это корни характеристического
уравнения
- полюсы . Полюсы - это корни характеристического
уравнения![]() ,
получаемого приравниванием нулю
знаменателя функции W(р).
,
получаемого приравниванием нулю
знаменателя функции W(р).
В общем случае при действительных
коэффициентах
![]() полюсы являются действительными или
комплексно-сопряженными числами
полюсы являются действительными или
комплексно-сопряженными числами
![]() или
или![]() ,
,![]() .
Тогда
.
Тогда![]() .
.
Подставив это выражение в (5.13), получим
![]() .
.
Из этого выражения следует, что необходимым
и достаточным условием устойчивости
САУ, когда
![]() ,
является условие
,
является условие![]() , т.е. в устойчивых системах действительные
части всех корней характеристического
уравнения системы должны быть отрицательны.
, т.е. в устойчивых системах действительные
части всех корней характеристического
уравнения системы должны быть отрицательны.
Это простое на первый взгляд условие
может быть проверено на практике только
при степени характеристического
уравнения
![]() .
При
.
При![]() общего
аналитического решения характеристических
уравнений не найдено. Поэтому при
общего
аналитического решения характеристических
уравнений не найдено. Поэтому при![]() для оценки устойчивости САУ предложено
несколько косвенных методов проверки
устойчивости САУ без решения
характеристического уравнения.
для оценки устойчивости САУ предложено
несколько косвенных методов проверки
устойчивости САУ без решения
характеристического уравнения.