

50. Методы анализа нелинейных сау. Виды нелинейностей характеристик нелинейных элементов Методы анализа нелинейных систем
Строго говоря линейных систем в природе не существует, все реальные системы нелинейны. Нелинейностью характеристик обладают различные датчики, детекторы, дискриминаторы, усилители, аналого-цифровые и цифро-аналоговые преобразователи, устройства управления и исполнительные устройства.
Общей теории анализа нелинейных систем нет. Учеными разработаны различные методы анализа нелинейных систем, которые позволяют решать задачи анализа при определенных условиях и ограничениях.
Дадим характеристику наиболее распространенным методам анализа нелинейных систем.
Метод фазовой плоскости.Этот метод называют также методом фазовых портретов или фазовых пространств. Этот метод позволяет наглядно с помощью графических построений проанализировать поведение нелинейных систем, описываемых нелинейными дифференциальными уравнениями не выше второго (третьего) порядка.
Метод кусочно-линейной аппроксимации.В этом методе используется кусочно-линейная аппроксимация характеристики нелинейного элемента, система анализируется как линейная при различных значениях сигналов, а затем результаты анализа «сшиваются». Метод отличается высокой трудоемкостью анализа и невысокой точностью результатов, особенно в точках «сшивания».
Метод гармонической линеаризации.Этот метод применяется в тех случаях, когда после нелинейного элемента включен линейный фильтр нижних частот, а входное воздействие гармоническое.
Метод статистической линеаризации.Этот метод применяется в тех случаях, когда в качестве входного сигнала действует стационарный случайный процесс. В этом методе реальный нелинейный элемент заменяется на такой линейный элемент, на выходе которого математическое ожидание и дисперсия процесса такие же, как и на выходе реального нелинейного элемента. Способы определения параметров эквивалентного линейного элемента могут быть различными.
Метод марковских процессов.Этот метод используется при нестационарных случайных входных сигналах, но аналитическое решение удается найти только для систем не выше второго порядка.
Метод моделирования на ЭВМ.Этот метод претендует на универсальность, он не имеет принципиальных ограничений на характер нелинейности и порядок системы. В настоящее время это наиболее распространенный метод анализа нелинейных систем, единственным недостатком метода является отсутствие каких-либо аналитических результатов анализа (в виде формул).
Виды нелинейностей характеристик нелинейных элементов
На рис.10.1 приведены характерные нелинейные характеристики нелинейных элементов, связывающие значения сигнала yна выходе элемента с сигналомxна его входе.
На рис.10.1а приведена характеристика
усилителя-ограничителя с зоной линейности.
При значениях входного сигнала
![]() выходной сигналy=kx,
где
выходной сигналy=kx,
где![]() ,
то есть выходной сигнал прямопропорционален
входному сигналу. При
,
то есть выходной сигнал прямопропорционален
входному сигналу. При![]() выходной сигнал
выходной сигнал![]() ,
т.е. имеет место режим ограничения.
,
т.е. имеет место режим ограничения.
На рис.10.1.б приведена нелинейная
характеристика треугольной формы с
зоной линейности при
![]() .
.
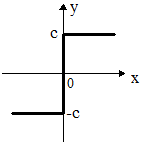
На рис.10.1.в приведена характеристика
идеального ограничителя. Такую
характеристику называют иногда релейной.
Сигнал на выходе идеального ограничителя
y=cпри![]() иy=-cпри
иy=-cпри![]() .
.
На рис.10.1.г приведена характеристика, в которой зона линейности плавно переходит в зону ограничения. Такими свойствами обладают функции y=arctgx,y=thxи некоторые другие. Такие характеристики имеют дифференциальные усилительные каскады.
На рис.10.1.д приведена характеристика вида y=csinx. Такими характеристиками обладают некоторые фазовые и частотные детекторы.
На рис.10.1.е приведена характеристика ограничителя с гистерезисом. Такой характеристикой обладают двухпозиционные поляризованные реле. В характеристиках с гистерезисом зависимость y=f(x) происходит по разному в зависимости от того, в какую сторону изменяется входной сигналx.
На рис.10.1.ж приведена характеристика, аналогичная той, что приведена на рис.10.1.г, но с гистерезисом.
На рис.10.1.з приведена характеристика
ограничителя с зоной нечувствительности.
В этом ограничителе выходной сигнал
y=0 при![]() ,
а при
,
а при![]() выходной сигнал
выходной сигнал![]() .
.
На рис.10.1.и приведена характеристика ограничителя с зоной нечувствительности и с гистерезисом. Такими характеристиками обладают трехпозиционные поляризованные реле или реле с нейтралью.
(а)

(б)

(в)
(г)

(д)

(е)

(ж)

(з)

(и)
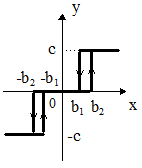
Рис.10.1 Характеристики нелинейных элементов