

23. Критерий устойчивости Гурвица.
Для применения этого критерия вначале
составляется квадратная матрица Гурвица
размером
![]() вида:
вида:
 (5.14)
(5.14)
Порядок составления матрицы Гурвица
следующий. В левом верхнем углу запишем
коэффициент
![]() ,
по главной диагонали располагаем
коэффициенты с убыванием индекса до
нуля. Над элементами главной диагонали
записываем коэффициенты с убыванием
индексов, а под ними - коэффициенты с
возрастанием индексов, как это сделано
в (5.14).
,
по главной диагонали располагаем
коэффициенты с убыванием индекса до
нуля. Над элементами главной диагонали
записываем коэффициенты с убыванием
индексов, а под ними - коэффициенты с
возрастанием индексов, как это сделано
в (5.14).
Для оценки устойчивости системы надо
вычислить определители
![]() Гурвица, которые получаются из матрицы
Гурвица отчеркиванием равного числа
строк и столбцов от верхнего угла
матрицы. Например
Гурвица, которые получаются из матрицы
Гурвица отчеркиванием равного числа
строк и столбцов от верхнего угла
матрицы. Например![]()
 ,
, и т.д. до
и т.д. до![]() ,
который описывается (5.14).
,
который описывается (5.14).
Критерий Гурвица гласит: если при
![]() все определители
все определители![]() ,
то система устойчива. Т.к.
,
то система устойчива. Т.к.![]() ,
то при а
,
то при а![]() достаточно проверить только знаки
определителей
достаточно проверить только знаки
определителей![]() .
.
Из условия
![]() можно определить параметры системы,
при которых она находится на границе
устойчивости.
можно определить параметры системы,
при которых она находится на границе
устойчивости.
24. Критерий устойчивости Найквиста. Оценка устойчивости по лачх и лфчх разомкнутых сау.
Этот критерий позволяет судить об
устойчивости замкнутой системы по
годографу разомкнутой системы. Критерий
Найквиста гласит: если годограф ККП
разомкнутой системы
![]() при изменении частоты от нуля до
бесконечности не охватывает на комплексной
плоскости
при изменении частоты от нуля до
бесконечности не охватывает на комплексной
плоскости![]() точку с координатами -1; j0, то замкнутая
система, собранная по схеме рис. 5.3.а,
будет устойчива. В противном случае
замкнутая система будет неустойчива.
Для замкнутой системы, образованной по
схеме рис. 5.3.б, вместо годографа
точку с координатами -1; j0, то замкнутая
система, собранная по схеме рис. 5.3.а,
будет устойчива. В противном случае
замкнутая система будет неустойчива.
Для замкнутой системы, образованной по
схеме рис. 5.3.б, вместо годографа![]() рассматривается годограф
рассматривается годограф![]()
На рис. 5.7 приведены годографы устойчивой и неустойчивой замкнутых систем.
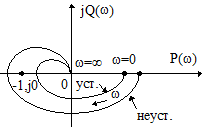
Рис. 5.7 Годографы
![]() устойчивой и неустойчивой замкнутых
систем
устойчивой и неустойчивой замкнутых
систем
Замкнутая система называется абсолютно устойчивой, если она может стать неустойчивой только при увеличении коэффициента усиления разомкнутой системы. Годограф такой системы приведен на рис. 5.7.
Замкнутая система называется условно устойчивой, если она может стать неустойчивой как при увеличении, так и при уменьшении коэффициента усиления разомкнутой системы.
На рис. 5.8 приведен годограф
![]() условно устойчивой замкнутой системы.
условно устойчивой замкнутой системы.

Рис. 5.8 Годограф
![]() условно устойчивой замкнутой системы
условно устойчивой замкнутой системы
Оценка устойчивости по ЛАЧХ и ЛФЧХ разомкнутых САУ смотри билет ниже (23).
25. Запасы устойчивости по фазе и усилению. Устойчивость сау с линией задержки. Запасы устойчивости по фазе и усилению
В годографе ККП
![]() объединены воедино амплитудно-частотная
и фазочастотная характеристики, что не
всегда удобно.
объединены воедино амплитудно-частотная
и фазочастотная характеристики, что не
всегда удобно.
Для определения количественных характеристик устойчивости замкнутой системы удобнее использовать отдельно графики АЧХ и ФЧХ разомкнутой системы. Количественными характеристиками устойчивости являются запасы устойчивости по фазе и усилению.
Запас устойчивости замкнутой системы
по фазе определяется
по формуле![]() , (5.15) где
, (5.15) где![]() - значение ФЧХ разомкнутой системы на
частоте среза
- значение ФЧХ разомкнутой системы на
частоте среза![]() ,
на которой АЧХ разомкнутой системы
,
на которой АЧХ разомкнутой системы![]() .
.
Для устойчивой системы
![]() , желательно, чтобы
, желательно, чтобы![]() радиан.
радиан.
Запас устойчивости по усилению
![]() определяется по формуле
определяется по формуле![]() (5.16) где
(5.16) где![]() - значение АЧХ разомкнутой системы на
критической частоте
- значение АЧХ разомкнутой системы на
критической частоте![]() ,
на которой
,
на которой![]() .
.
Для устойчивой системы
![]() ,
желательно, чтобы
,
желательно, чтобы![]() .
.
Запас устойчивости по усилению для ЛАЧХ
определяется по формуле
![]()
[дБ] = - 20lgWР(КР).
В устойчивой системе![]() дБ.
дБ.
На рис. 5.9 приведены графики ЛАЧХ Ри ЛФЧХРдля устойчивой (а) и неустойчивой (б) замкнутых систем.
(а)

(б)

Рис.5.9. Графики
![]() ,
,![]() для устойчивой (а) и неустойчивой (б)
замкнутых систем
для устойчивой (а) и неустойчивой (б)
замкнутых систем
Из рис. 5.9 следует, что в устойчивой
системе
![]() ,
а в неустойчивой системе
,
а в неустойчивой системе![]() .
.