3.1.3. Математическая модель стабильности позвоночника
В основу модели положено математическое описание динамических процессов дифференциальными уравнениями Лагранжа 2-го рода, составляемого на основе расчетной схемы трехпозвонкового комплекса, представленного как дискретные сосредоточенные массы, связанные упругодемпфирующими элементами и обладающие определенными геометрическими параметрами [III, 6].
За основу был принят принцип стабильности позвоночного столба изложенный L. Rene, где стабильность позвоночника представлена в вертикальной, горизонтальной и аксиальной плоскостях (ротация), что обеспечивается телами позвонков с дугоотростчатыми суставами, которые связаны между собой упруго-демпфирующими элементами (межпозвоночные диски, мышечно-связочный аппарат).
Учитывались следующие параметры трехпозвонкового комплекса:
Механическая система является диссипативной.
Распределение нагрузок соответствует трехстолбовой концепции.
Предел прочности тел позвонков и упругодемпфирующих элементов, а также их упругая деформация и плотность считались условно установленными по данным работы.
Изменение геометрических характеристик трехпозвонкового комплекса соответствовало типичным типам статико-динамических нарушений стабильности позвоночника [III, 6, 13, 21-24].
Расчетная схема фрагмента позвоночника человека, состоящая из трех позвонков с клиновидным средним позвонком и стабилизирующими конструкциями представлена на рис.3.8 с вариантом клиновидной деформации среднего позвонка и двумя стабилизирующими конструкциями (для передних и заднего опорных комплексов).
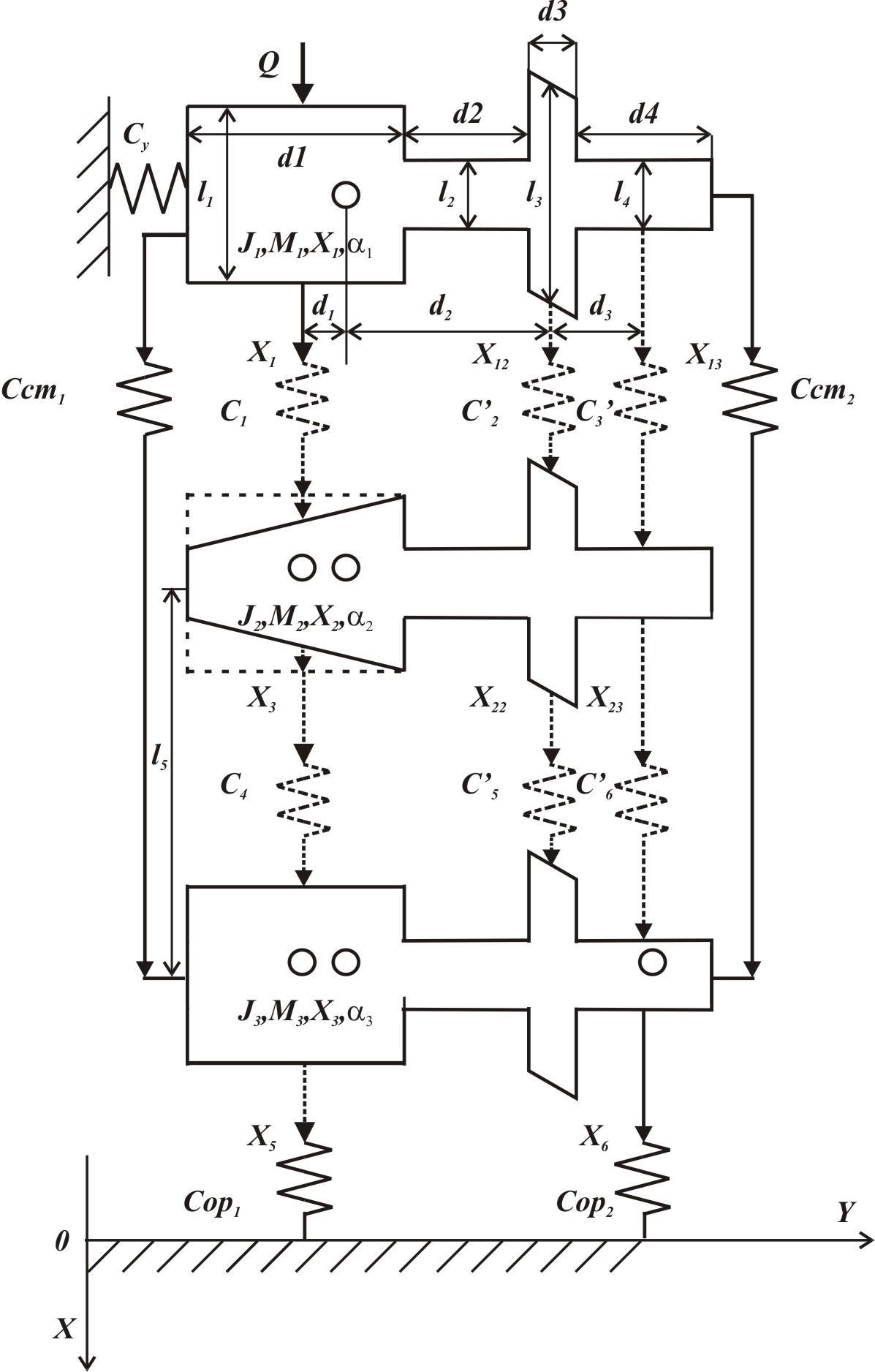
Рис. 3.8. Расчетная схема трехпозвонкового комплекса человека.
Здесь введены следующие обозначения:
Ji, Мi, Xi– момент инерции, масса, координата i-го позвонка (i = 1,2,3);
Cстi –коэффициенты жесткости j–й стабилизирующей пластины (j = 1,2);
Сopj - коэффициенты жесткости j–й опоры (j = 1,2);
d1=25 мм; d2=20 мм;d3=5 мм; d4=30 м;
d1=8.5 мм; d2=26.5 мм; d3=17 мм;
l1=32 мм; l2=10 мм; l3=25 мм; l4=10 мм; l5=50 мм;
m1= m2=m3 =0.1 кг;
J1= J2=J3=35 кгּмм2; Yц=17.2 мм; S=13.25 см2.
Координаты Хц и Yц центра тяжести и момента инерции J плоского позвонка определяются формулами:
 ;
;
 ;
;![]() (3.1.25)
(3.1.25)
где индекс i определяет число элементарных фигур, составляющих плоский позвоночник; γ – удельная поверхностная масса позвонка, кг/мм2.
Предел прочности, упругая деформация и коэффициенты жесткости различных участков позвоночника по А.П. Громову, приведены в таблице:
Предел прочности, упругая деформация и коэффициенты жесткости различных участков позвоночника Таблица 3.3
|
Nо. |
Наименование комплексов |
Предел прочности, кг/см2 |
Упругая деформация Х, мм |
Коэффициенты жесткости С, н/мм |
|
1. |
Шейный отдел |
120-170 |
4,0-5,2 |
(2.30 - 5.52)·103 |
|
2. |
Грудной отдел |
190 |
5.3 |
4.66·103 |
|
3. |
Поясничный отдел |
420 |
5,0-8.5 |
(6.40-11,00)·103 |
|
4. |
Целая грудная клетка |
240 |
33,0 |
944.40 |
Для упрощения динамической модели трехпозвонкового комплекса коэффициенты жесткости С2 и С3, а также коэффициенты жесткости С5 и С6 приведены к одним коэффициентам С2 и С4 (см. рис.3.8), соответственно, по следующим формулам:
![]() ;
;
![]() . (3.1.25)
. (3.1.25)
На расчетной схеме (рис.3.9.) третий позвонок связывается посредством жестких элементов Сор1 и Сор2 с опорой по оси Ox, а первый по оси Y через – Сy.

Рис.3.9. Расчетная схема трехпозвонкового комплекса с патологией среднего позвонка и ее двухсторонней стабилизацией (2-ой вариант).
Для фиксации вариантов нестабильности позвоночника предусмотрено применение условных жестких плоскостных конструкций с коэффициентами жесткости Сст1 и Сст2, что позволяет моделировать, как жесткие ригидные металлические системы, как и полуригидные пружинные элементы.
Разработанная математическая модель позволяет на основе вычисления внутренних нагрузок опорных комплексов каждого позвонка трехпозвонкового комплекса, рассчитывать варианты переломов и нестабильности позвонков в различных зонах при их патологии. Кроме этого, можно произвести расчет смещения позвонков по оси Oy под воздействием силы Q2y, что чаще всего является причиной стеноза позвоночного канала и может приводить к удавлению дуального мешка. Выбранная динамическая модель трехпозвонкового комплекса человека (см. рис.3.9.) является механической системой, для которой уравнение Лагранжа II рода имеет вид:
![]() ,
k=1,…,7, (3.26)
,
k=1,…,7, (3.26)
где Т, П – кинетическая и потенциальная энергия системы;
Ф – диссипативная функция, определяемая спинными мышцами;
Qk – внешние воздействия.
В качестве обобщенных координат Xk принимаются следующие координаты:
х1;
х2;
х3;
х4
(α1
=
![]() );х5;
х6
(
);х5;
х6
(![]() );у, (3.1.27)
);у, (3.1.27)
где Di = d1 + d2; i = 1,2,3.

Рис.3.10. К расчету сил, действующих на средний позвонок с патологией трехпозвонкового комплекса человека.
Для вычисления смещающей силы, действующей на 2-й позвонок вдоль оси Y, возникающих вследствие клиновидной деформации (по сути трапеции) второго позвонка рассмотрим рис.3.10.
P1 Q11=Q1·cos(β1); P3 O3=Q3·cos(β3);
O1 Q12= Q1·sin(β1); Q3O3=Q3·sin(β3);
Q1x=O2 Q12=O1 Q12·sin(β1)= Q1·sin2(β1);
Q1y=O1 O2= Q1·sin(β1)·cos(β1);
Q3x=O4 Q31·sin(β3)= Q3·sin2(β3);
Q3y=O3 O4= Q3·sin(β3)·cos(β3);
Q2y=Q1y+Q3y = С1 Х1·sin(β1)·cos(β1)+ С3 Х3·sin(β3)·cos(β3);
y2= x1·sin(β1)·cos(β1)+ x3·sin(β3)·cos(β3).
Таким образом, проекции сил Q1и Q3 на оси Х и Y при наличии деформации среднего позвонка трехпозвонкового комплекса человека определяются приведенными выше формулами.
Кинетическая энергия механической системы трехпозвонкового комплекса человека, приведенная на рис.3.8. и равна:

![]() (3.1.28)
(3.1.28)
где
![]()
![]() ,–
квадраты скоростей колебаний и вращений
1-го, 2-го и 3-го позвонков относительно
центра тяжестей этих позвонков.
,–
квадраты скоростей колебаний и вращений
1-го, 2-го и 3-го позвонков относительно
центра тяжестей этих позвонков.
Упругие деформаций х1, х2; х3, х4; х5, х6 центрального и правого столбов 1-го, 2-го и 3-го столбов позвонков связаны с деформаций центра тяжестей этих позвонков X1, Х2, Х3 и α1, α2, α3 следующими соотношениями:
![]()
![]()
![]() (3.1.29)
(3.1.29)
Задача решается в приближении малых смещений, то есть
Xi <<Di; tg(αi) = sin(αi) = αi . (3.1.30)
Тогда X1 и α1 выражаются через х1 и х2 по формулам (для второго и третьего позвоночника, аналогично):
![]() ;
X1
=
;
X1
=
![]() . (3.1.31)
. (3.1.31)
С учетом соотношения (3.31) кинетическая энергия трехпозвонкого комплекса с патологией среднего позвонка (ТКПСП) и ее двухсторонней стабилизацией, приведенного на рис.2, запишется в следующем виде:
![]()
 (3.1.32)
(3.1.32)
где
![]()
Потенциальная энергия механической системы трехпозвонкового комплекса человека считается равной нулю при положении статического равновесия (абсолютные координаты), а отсчет деформации упругих элементов ведется от условия, когда статическая нагрузка на элемент уравновешивается упругой силой от его осадки.
В этом случае потенциальная энергия П деформации упругих элементов трехпозвонкого комплекса с патологией среднего позвонка и ее двухсторонней стабилизацией определяется следующим соотношением:
![]()
![]() (3.1.33)
(3.1.33)
Диссипативная функция Ф ТКПСП и ее двухсторонней стабилизацией записывается через коэффициенты демпфирования Вj, как
![]()
![]() (3.1.34)
(3.1.34)
Определив
функции кинетической Т,
потенциальной энергии П
и диссипативных сил Ф,
вычислим сначала производные от
кинетической энергии по
![]() :
:
![]()
![]()
![]() (3.1.35)
(3.1.35)
![]()
Производные
от потенциальной энергии П
трехпозвонкого комплекса по координатам
![]() равны:
равны:
![]()
![]()
![]()
![]() (3.1.36)
(3.1.36)
![]()
![]()
![]()
Производные от диссипативный функции Ф трехпозвонкого комплекса:
![]()
![]()
![]() (3.1.37)
(3.1.37)
![]()

![]()
Подставляя значения производных от кинетической и потенциальной энергии, а также от диссипативной функции Ф для механической системы трехпозвонкового комплекса в уравнения Лагранжа II рода, получим:
![]()
![]()
![]()
![]()
![]()
![]() (3.1.38)
(3.1.38)
![]()
![]()
![]()
![]()
![]()
![]()
где с1= cos(β1); c3= cos(β3).
С целью упрощения записи матриц, введем обозначения
S1= С1 x1·sin(β1)·cos(β1);
S3=С3·x3·sin(β3)·cos(β3);
![]() ;
;
![]() ;
;
![]() ;
;
![]() ,
,
Подставляя значения производных от кинетической и потенциальной энергии, а также от диссипативной функции Ф для механической системы трехпозвонкового комплекса в уравнения Лагранжа II рода, получим в векторном виде:
![]() , (3.1.39)
, (3.1.39)
где
 ;
;

![]()
Х=![]()
где с1= cos(β1); c3= cos(β3).
S1= С1 x1·sin(β1)·cos(β1);
S3=С3·x3·sin(β3)·cos(β3);
![]() ;
;
![]() ;
;
![]() ;
;
![]() ,
,
SB1= B1 x1·sin(β1)·cos(β1);
SB3= B3 x3·sin(β3)·cos(β3).
Умножая обе части векторного уравнения (3.1.40) на обратную матрицу М-1, получим следующее приведенное векторное уравнение:
![]()
или
![]() , (3.1.40)
, (3.1.40)
где
А
= М-1
С;
![]() ;F
=
;F
=
![]() .
.
Интерпретация полученных результатов. Для получения эпюр нагрузок Р1, Р2 и Р3, Р4, а также упругих деформаций х1, х2 и х3, х4 вдоль оси Y для 1 и 2-го позвонков использовалась линейная интерполяция и экстраполяция в соответствии со следующими формулами (для 1-го позвонка при его длине 80мм)
![]() y
y![]() ,
(3.1.41)
,
(3.1.41)
где
![]() .
.
Эпюры нагрузок Р3, Р4 и упругих деформаций х3, х4 для 2-го позвонка рассчитываются по формулам, формулам (3.1.42).
Текст программы алгоритма математической модели трехпозвонкового комплекса, написанной на блочно-структурном языке системы MATH CAD и числовые данные, приведены ниже.



![]()
С1=3.26 103; С2=0.92 103; С3=0.46 103; С4=3.26 103; С5=0.92 103;
![]() С6=0.46
103н/мм;
Су=5
103н/мм;
Cop1=Cop2=3.26
103н/мм;
С6=0.46
103н/мм;
Су=5
103н/мм;
Cop1=Cop2=3.26
103н/мм;
Q=400кг (внешняя сила приложена к центру тяжести позвонка при у=21мм); β1=00; β3=00 (деформация позвонка отсутствует); Сст1=Сст2=0 (стабилизирующие пластины слева и справа от позвонков отсутствуют (см. рис.3.11)), число временных слоев j = 1000, а шаг интегрирования по времени τ = 10-2с.