

2.4.1. Система равносильных преобразований
Существует следующая система основных тождеств булевой алгебры:
1.  правило
двойного отрицания
правило
двойного отрицания
2.  коммутативность
конъюнкции
коммутативность
конъюнкции
3.  и
дизъюнкции
и
дизъюнкции
4.  ассоциативность
конъюнкции
ассоциативность
конъюнкции
5.  и
дизъюнкции
и
дизъюнкции
6.  первый
и второй закон
первый
и второй закон
7.  дистрибутивности
дистрибутивности
8.  идемпотентность
конъюнкции
идемпотентность
конъюнкции
9.  идемпотентность
дизъюнкции
идемпотентность
дизъюнкции
10.  законы
законы
11.  де
Моргана
де
Моргана
12.  обобщение законов
обобщение законов
13.  де Моргана, гдеАвыражение
де Моргана, гдеАвыражение
Существуют такие 1 и 0, что и
и
a+ 1 = 1
a1 = 1 операции с константами
a+ 0 =a
a0 = 0
13.  действия
с
действия
с
14.  дополнениями
дополнениями
15.  законы
законы
16.  поглощения
поглощения
17. 
18. 
19. 
2.5. Синтез систем дискретной автоматики
Системы электроавтоматики с релейными элементами широко используются для автоматизации различных периодических технологических процессов.
Для управления периодическими процессами и машинами, работающими по циклическому графику, применяются однотактные и многотактные системы автоматического управления.
Однотактные системы строятся на комбинационных логических функциях (ЛФ). Уровень сигнала на выходе системы определяется только комбинацией значений сигналов на входе, поступающих от датчиков, задающих и командных устройств, т.е. сигналы на выходе системы однозначно определяются сигналами на входе.
Многотактные системы реализуются последовательностными ЛФ. Состояние сигнала на выходе автоматического устройства определяется не только входными сигналами, поступившими в данный момент, но и последовательностями появления входных сигналов, т.е. при одной и той же комбинации входных сигналов на выходе многотактного устройства могут быть разные выходные сигналы. Поэтому многотактные системы должны «запоминать» последовательность появления входных сигналов. Многотактные системы, содержащие элементы «памяти» и обратные связи, являются основными системами дискретной автоматики.
Основной задачей синтеза автоматических систем управления является разработка структуры автоматического устройства и составление схем, реализующих полученную структуру. При этом на основании заданных условий работы автоматического устройства составляются алгебраические выражения (структурные формулы), описывающие работу разрабатываемого автоматического устройства. Затем в результате минимизации получают наиболее простые алгебраические выражения, на основании которых выполняют структурные и электрические схемы. На практике применяют специальные методы логического синтеза структур автоматических систем управления.
Достаточно хорошо разработаны методы синтеза, основанные на использовании таблиц состояний, таблиц переходов и выходов, с использованием циклограмм или графов.
2.5.1. Синтез дискретных схем по таблицам состояний.
По таким таблицам достаточно просто может быть выполнен синтез однотактных систем управления. Таблицы состояний составляют на основе изучения условий работы технологических аппаратов и определения, при каких соотношениях входных сигналов должны быть сигналы на выходе, а при каких нет. На основании таблиц составляют алгебраические выражения, описывающие логические связи данной системы и, следовательно, определяющую ее структуру. При составлении алгебраических выражений применяются правила истинности (правило единиц) или ложности (правило нулей).
Согласно правилу единиц для строк таблиц состояний, где выходная величина 1, определяют дизъюнкции конъюнкций входных переменных для строк, где выходная величина равна 1, т.е. определяют произведения входных величин и складывают их.
Согласно правилу ложности, структурную формулу составляют путем определения конъюнкции дизъюнкций входных сигналов строк таблиц состояний, в которых выходная величина равна 0.
Пример.Пусть работа объекта контролируется тремя датчиками. Условия работы системы: на выходе логического устройства должен появиться сигнал, приводящий в действие исполнительный элементX, если на вход поступают два из трех любых сигналов или все три сигнала (мажоритарная функция, схема голосования два из трех).
Таблица состояний (табл. 2.3) для данного примера имеет следующий вид:
Таблица 2.3. Состояние автомата
|
№ п/п |
Входы |
Выход | |||
|
а |
b |
с |
X | ||
|
1 |
0 |
0 |
0 |
0 | |
|
2 |
1 |
0 |
0 |
0 | |
|
3 |
0 |
1 |
0 |
0 | |
|
4 |
0 |
0 |
1 |
0 | |
|
5 |
1 |
1 |
0 |
1 | |
|
6 |
1 |
0 |
1 |
1 | |
|
7 |
0 |
1 |
1 |
1 | |
|
8 |
1 |
1 |
1 |
1 | |
Структурная формула, определяющая условия работы схемы и составленная согласно правилу единиц, имеет вид
 (2.1)
(2.1)
Полученное выражение минимизируется с целью получения структуры. Для этого используются основные законы алгебры логики или специальные методы. Предварительно для упрощения дважды повторим последний член выражения (2.1), а затем сгруппируем и вынесем общие множители, получим

Так как выражения в скобках дают 1, то структурная формула имеет вид
Х =ab +ас +bс (2.2)
Релейно-контактная схема, реализующая полученную ЛФ, приведена на рис. 2.5.
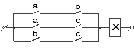
Рис. 2.5. Реализация логической функции (2.2) в виде релейно-контактной схемы
Схема на логических элементах приведена на рис. 2.6.

Рис. 2.6. Реализация функции (2.2) на логических элементах
Дальнейшее упрощение (2.2) приводит к виду
X=a (b+c) +bc.(2.3)
Релейно-контакторная схема, реализующая полученную ЛФ, приведена на рис. 2.7.

Рис. 2.7. Схемная реализация логических функций (2.3)
Схема на логических элементах приведена на рис. 2.8.
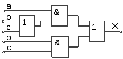
Рис. 2.8. Реализация функции (2.3) на логических элементах