

14.9. Микропроцессор как основа нового поколения систем автоматизации
Описанные в 14.8 управляющие и регулирующие системы с применением микро-ЭВМ образуют фундамент для современных иерархических систем автоматизации. Это поясняется иерархической структурой (рис. 14.21), которая удовлетворяет требованиям гибкости и способности приспосабливаться.
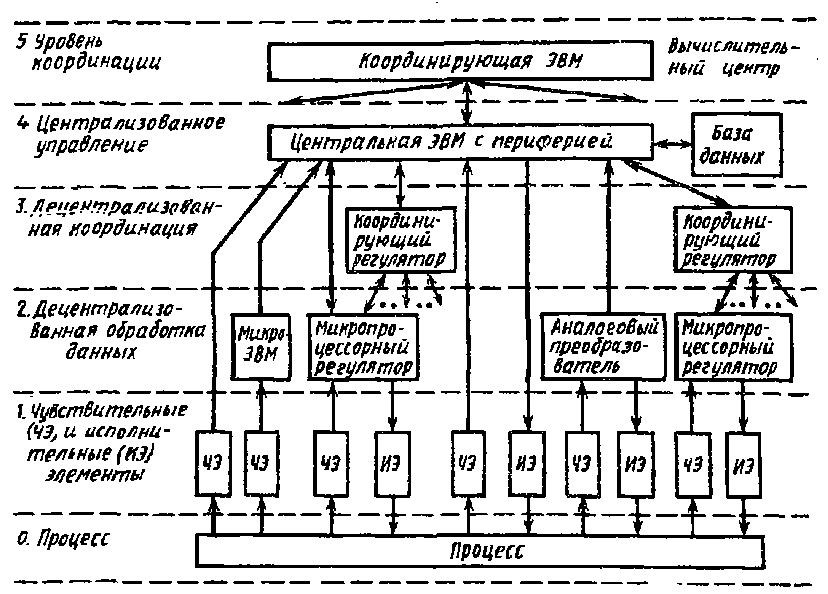
Рис. 14.21
Тенденции увеличения применения микроЭВМ в последние годы в системах автоматизации имеют следующие причины:
разнообразие функций для управления и регулирования (не только обеспечение функций управления и вычисления, но и функций контроля, оценки надежности и т.д.);
установление иерархии автоматических устройств через функционально децентрализованное (уравень 3 рис. 14.21) координированное управление.
При таком децентрализованном управлении можно преодолевать большие расстояния между микропроцессорными ЭВМ и центральной ЭВМ.
На рис. 14.22 представлена структурная схема системы, в которой первичные управляющие и регулирующие функции осуществляются микроЭВМ, распределенными (децентрализованными) в пространстве. На микроЭВМ подаются команды от центральной ЭВМ при помощи последовательной передачи данных по коаксиальным кабелям. Такого рода последовательная передача информации при одновременном уменьшении ее объема, поступающего в центральную машину, ведет к заметному уменьшению стоимости (порядка 50 % общей стоимости) установки и кабелей по сравнению с обычным централизованным управлением.
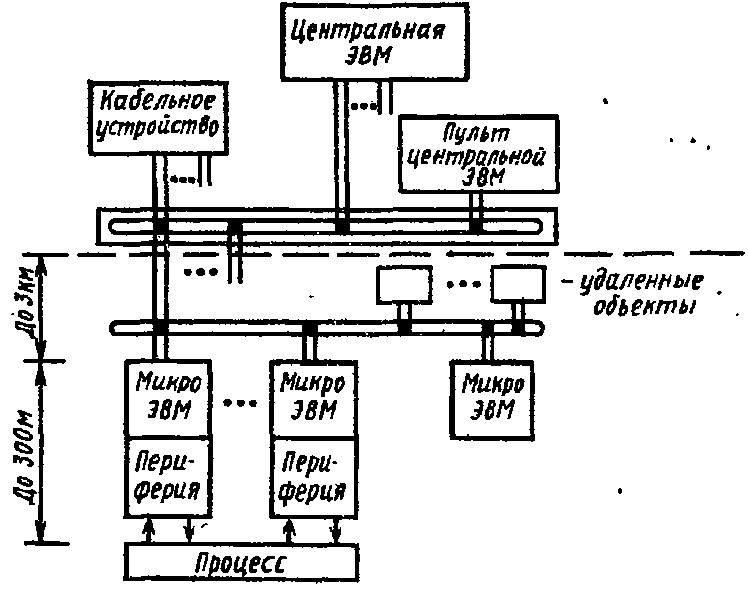
Рис. 14.22
Кроме того, появляется возможность координации и оптимального управления отдельным процессом. Проектирование таких децентрализованных систем дает дальнейшие возможности, как, например, сравнительную развязку отдельных уровней и децентрализованных микропроцессоров, кроме того, возможна аппаратурная и программная полезная избыточность, а также возможности контроля и диагностики. Правда, можно ожидать некоторого усложнения проблемы надежности программного обеспечения.
На рис. 14.23 показано включение многоканального микропроцессорного регулятора в многоуровневую систему. Для простых задач можно использовать последовательную шину, причем каждый регулятор в некоторой степени играет самостоятельную роль в функционально-децентрализованной системе. Более сложные задачи могут решаться при помощи регулятора, который, по меньшей мере, включает периферию контуров регулирования. Базисным элементом этой системы может служить ЭВМ, не обладающая собственной периферией. В качестве ведущего устройства для центральной координации служат несколько дисплеев с клавиатурами. Дальнейшее развитие этой сложной иерархической схемы автоматизации возможно при помощи ее соединения с АСУП.
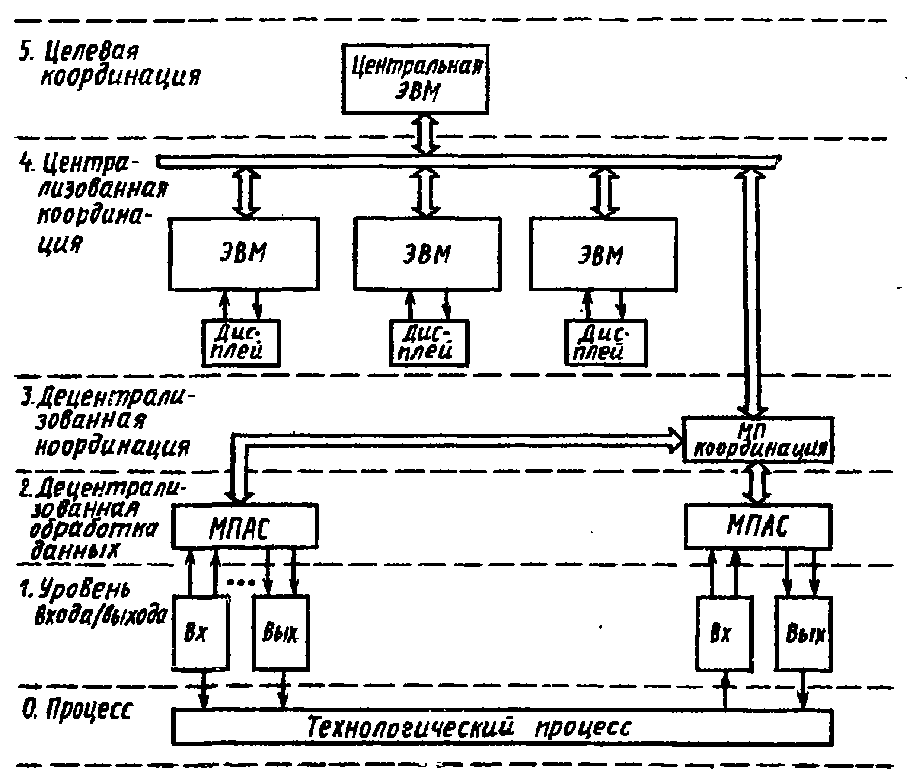
Рис. 14.23
На рис. 14.24 представлена микроэлектронная система управления, здесь показаны важнейшие из ее возможностей взаимодействия между отдельными устройствами. Бинарные возмущения можно передавать кабелем из базисной машины или использовать информацию о них, содержащуюся в программированной памяти микропроцессорного регулятора.
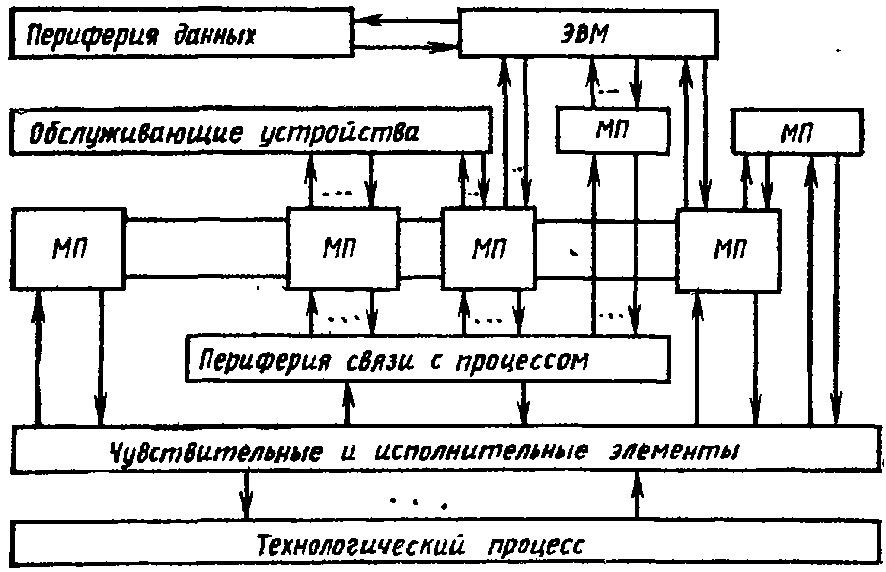
Рис. 14.24
Для преодоления больших расстояний (свыше 3–5 км) можно использовать телеуправление.